") GelSight觸覺(jué)傳感器:表面柔軟、分辨率高,能復(fù)刻整塊餅干的形狀和紋理
GelSight觸覺(jué)傳感器:表面柔軟、分辨率高,能復(fù)刻整塊餅干的形狀和紋理
近年來(lái),人工智能(AI)的發(fā)展勢(shì)頭從最初的興起逐漸走向平緩,現(xiàn)階段 AI 領(lǐng)域面臨的一個(gè)瓶頸就是十分依賴人工標(biāo)注的數(shù)據(jù),正如數(shù)據(jù)標(biāo)注行業(yè)流行的那句話,“有多少智能,就有多少人工”。
如果可以讓機(jī)器人自己進(jìn)行數(shù)據(jù)采集、數(shù)據(jù)分析,無(wú)疑可以節(jié)省很多人力。麻省理工學(xué)院(MIT)計(jì)算機(jī)科學(xué)系博士王少雄認(rèn)為能夠讓機(jī)器人學(xué)會(huì)自我分析是一件令他十分興奮的事情,“機(jī)器人可以利用自動(dòng)化的方式自己重置系統(tǒng),以及通過(guò)和物體交互的過(guò)程來(lái)自己學(xué)習(xí)”,他覺(jué)得這樣在數(shù)據(jù)標(biāo)注方面可以節(jié)省很多人力。
今年,王少雄和另外一位一作王辰的一篇有關(guān)機(jī)器人可以自我采集觸覺(jué)數(shù)據(jù)并自我分析,最終能夠完成特定動(dòng)作的論文獲得了機(jī)器人領(lǐng)域國(guó)際頂會(huì) IROS 2020 的最佳論文獎(jiǎng)。
下圖的機(jī)器人就是他們研究的成果,它叫 SwingBot,可以把它理解為是一個(gè) “甩筆” 機(jī)器人。它將這根筆由下到上翻轉(zhuǎn)了 180 度,這真的不是研究人員給它 “喂” 了大量的數(shù)據(jù)才建立的模型,這是它通過(guò)自我采集觸覺(jué)數(shù)據(jù)并學(xué)習(xí)分析后的結(jié)果。
這項(xiàng)研究來(lái)自于麻省理工學(xué)院(MIT)與上海交通大學(xué)的暑期聯(lián)合項(xiàng)目,論文題目為 “SwingBot: Learning Physical Features from In-Hand Tactile Exploration for Dynamic Swing-up Manipulation”(SwingBot:從手部觸覺(jué)探索中學(xué)習(xí)物理特征,以實(shí)現(xiàn)動(dòng)態(tài)擺起操作)。
論文的兩位一作分別是王辰和王少雄,王辰剛剛本科畢業(yè)于上海交通大學(xué)、即將前往斯坦福大學(xué)攻讀計(jì)算機(jī)科學(xué)博士學(xué)位,少雄本科畢業(yè)于清華大學(xué)、目前是 MIT 計(jì)算機(jī)科學(xué)系在讀博士生。
“我們?cè)谒伎荚鯓硬拍茏寵C(jī)器人通過(guò)簡(jiǎn)單的動(dòng)作去感知手上握有物體的物理特性,比如物體的質(zhì)量、重心,物體表面的摩擦力等,” 王辰告訴 DeepTech。
因?yàn)槿嗽谧龊芏嗫刂迫蝿?wù)的時(shí)候,其實(shí)并不需要知道這些精確的物理參數(shù),但是我們通過(guò)一些掂量的動(dòng)作,就能夠感受到這個(gè)物體的特性,比如我們?cè)诳?a target="_blank">手機(jī)時(shí),誰(shuí)也不會(huì)拿手機(jī)的上部,因?yàn)槲覀兡芨惺艿酵凶∈謾C(jī)的下部才是最省力的,但誰(shuí)也無(wú)法分析出具體關(guān)于力的物理參數(shù)。
研究人員正想讓機(jī)器人通過(guò)自我學(xué)習(xí)來(lái)解決這樣的問(wèn)題,讓它自我采集數(shù)據(jù)進(jìn)行整合分析,不斷地學(xué)習(xí),最終希望它不僅能分析出完成相關(guān)動(dòng)作所需的物理參數(shù),還能順利拿起未知物體完成指定動(dòng)作。
如果說(shuō)這篇論文的出彩之處是培養(yǎng)了機(jī)器人對(duì)觸覺(jué)的分析能力,那么實(shí)驗(yàn)中用到的觸覺(jué)傳感器則至關(guān)重要。
GelSight 觸覺(jué)傳感器:表面柔軟、分辨率高,能復(fù)刻整塊餅干的形狀和紋理
GelSight 最初是為測(cè)量目標(biāo)表面的三維形狀和紋理而設(shè)計(jì)的,由覆蓋有反射涂層膜的透明彈性體板組成。當(dāng)物體被壓在彈性體上時(shí),薄膜會(huì)變形,呈現(xiàn)物體表面的形狀,但具有一致的反射率。例如研究人員以?shī)W利奧餅干為例,將餅干壓在彈性體板的表皮上,從后面看,薄膜能夠完全復(fù)刻出餅干的形狀和紋理。
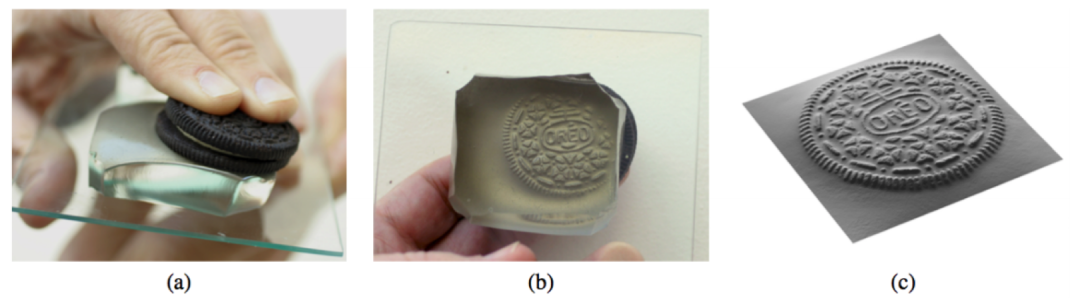
圖|將餅干壓在彈性體板的表皮上。來(lái)源:[1]
王少雄告訴 DeepTech,“這個(gè)觸覺(jué)傳感器其實(shí)是一個(gè)非常新的處理系統(tǒng),目前還處于研究階段,它最大的特點(diǎn)就是可以以整張圖像的形式輸入,而其它的傳感器可能只有十幾個(gè)電極,這就極大的豐富了觸覺(jué)的感知能力。”
王辰補(bǔ)充道,“GelSight 觸覺(jué)傳感器的一大優(yōu)點(diǎn)是成本更低,而且能夠返回高密度的光學(xué)信息,能夠更好的獲得觸覺(jué)端對(duì)物體的感知情況。”
研究中用到的觸覺(jué)傳感器 GelSight 同樣出于 MIT 實(shí)驗(yàn)室,最初是 MIT CSAIL 感知科學(xué)小組教授 Edward H. Adelson 2009 年的研究成果,近年來(lái)逐步研發(fā)并應(yīng)用于機(jī)器人觸覺(jué)中。
圖 | GelSight 原型,CVPR 2009。來(lái)源:[1]
圖 | GelSight 運(yùn)用于機(jī)器人觸覺(jué),Sensors 2017。來(lái)源:[2]
在本篇論文中,研究人員將下圖中的傳感器安裝在機(jī)械臂的抓手上,以此來(lái)采集不同質(zhì)量、重心物體的數(shù)據(jù)。
若要讓 Swingbot 很好地完成甩筆任務(wù),雖然研究人員猜測(cè)質(zhì)量、重心、摩擦力等參數(shù)可能會(huì)影響實(shí)驗(yàn)結(jié)果,但是他們并不知道究竟是哪一部分占主導(dǎo)作用,“所以需要機(jī)器人具備分析能力,我們希望它能夠通過(guò)傾斜以及抖動(dòng)這些簡(jiǎn)單的探索動(dòng)作,自己從觸覺(jué)傳感器的反饋信息當(dāng)中搜集完成這個(gè)任務(wù)所需要的信息。” 王辰說(shuō)道。
觸覺(jué)探索第一步:通過(guò)傾斜+搖晃,機(jī)器人得到不同筆的物理特征
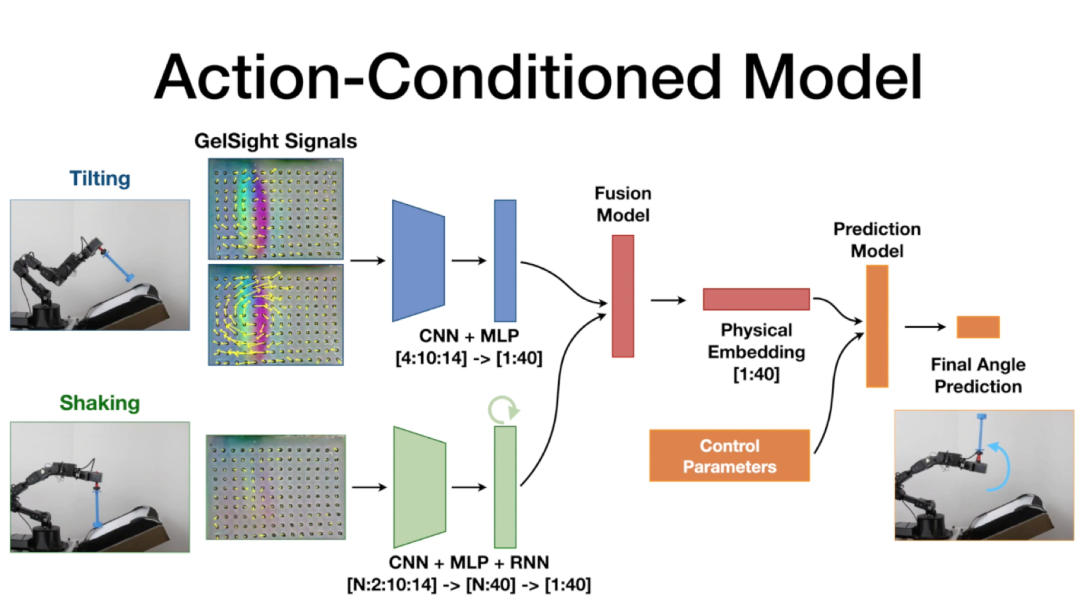
研究方法由兩個(gè)主要部分組成,一個(gè)信息融合模型和一個(gè)正向動(dòng)力學(xué)模型。研究人員首先讓 SwingBot 執(zhí)行兩個(gè)動(dòng)作,分別是傾斜和搖晃,這是一種手持式物理特征探測(cè)方法,幫助機(jī)器人進(jìn)行觸覺(jué)探索。一旦機(jī)器人學(xué)會(huì)嵌入物體的物理參數(shù),正向動(dòng)力學(xué)模型就會(huì)通過(guò)特征向量和控制參數(shù)來(lái)產(chǎn)生起擺運(yùn)動(dòng),以實(shí)現(xiàn)最終的 “甩筆” 角度。
少雄說(shuō)道,“我們想讓機(jī)器人去感覺(jué)一個(gè)未知的物體,通過(guò)讓它完成特定的操作來(lái)感知物體的物理信息,然后我們可以借助這個(gè)物理信息應(yīng)用到控制系統(tǒng)中。”
圖|機(jī)器人采取幾個(gè)步驟來(lái)獲取被持有對(duì)象的物理特征
在訓(xùn)練初始一定伴隨著很多困難,比如機(jī)器人總是拿不住筆,但這些都沒(méi)能難住他們。“我們?cè)诘紫掳惭b了一個(gè) V 型的槽,一方面它可以回收和接到飛出去的筆,另一方面它通過(guò)頂部的相機(jī)可以捕捉物體的一個(gè)位置,然后它可以去調(diào)節(jié)這個(gè)物體,讓它重新到最初的位置。通過(guò)這個(gè)方法就完全不需要人為去參與。” 王辰告訴 DeepTech。
在機(jī)器人完成傾斜動(dòng)作時(shí),研究人員發(fā)現(xiàn),當(dāng)物體傾斜到一定的角度時(shí)能夠檢測(cè)出物體的質(zhì)量,因此他們分別讓機(jī)器持筆傾斜到 20 度和 45 度,可以觀察到物體重量產(chǎn)生不同的力和扭矩分布。這些觸覺(jué)反饋信息會(huì)通過(guò)一個(gè)卷積神經(jīng)網(wǎng)絡(luò)(CNN)來(lái)輸出一個(gè)一維的特征向量。
在機(jī)器人完成晃動(dòng)任務(wù)時(shí),從觸覺(jué)信號(hào)的時(shí)間序列中可以觀察到不同的摩擦和震動(dòng),研究人員用一個(gè)循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN)來(lái)處理獲得相應(yīng)的特征,可以獲取有關(guān)摩擦力和慣性矩的信息。
然后,一個(gè)由若干多層感知器(MLP)組成的信息融合模型會(huì)將以上兩步中收集到的物理特征進(jìn)行整合分析,得到一個(gè)低維的物理特征概括,這也就是機(jī)器人獲取自我分析能力的基礎(chǔ)。
自我采集 1300 多組數(shù)據(jù)并分析,成功將筆甩至 90 度和 180 度
在機(jī)器人具備自我分析能力后,才迎來(lái)了研究的重點(diǎn) —— 甩筆,這項(xiàng)任務(wù)看似單一且簡(jiǎn)單,實(shí)則不然。
王辰告訴 DeepTech,甩筆其實(shí)是一個(gè)非常不穩(wěn)定的任務(wù),“剛開(kāi)始的時(shí)候不僅需要四處撿筆,而且有時(shí)它根本不能把筆甩起來(lái),或者甩不到我們想要的角度。在這個(gè)過(guò)程中,我們發(fā)現(xiàn)對(duì)于收集數(shù)據(jù)也非常困難。”
王辰還透露,機(jī)器人自我采集的數(shù)據(jù)一共有1300多組,包含27個(gè)不同物理特性的物體,采集這些數(shù)據(jù)用了大概一天的時(shí)間。“當(dāng)完成采集時(shí),這也是成功的訊號(hào)。”
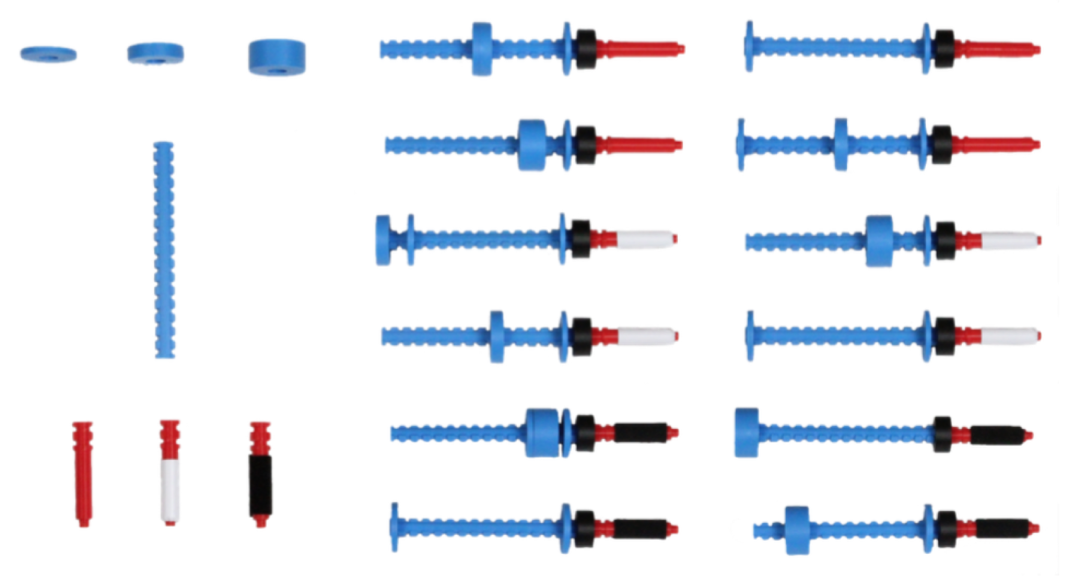
圖|通過(guò)添加 / 摘除相關(guān)零件以及換不同摩擦系數(shù)的筆頭來(lái)制作不同物理特性的物體
最后一步就是讓學(xué)習(xí)了物理特征的預(yù)測(cè)模型嘗試將那些未知特征的筆甩到特定角度,對(duì)此,研究人員準(zhǔn)備了 6 個(gè)測(cè)試對(duì)象,從機(jī)器人準(zhǔn)備甩筆到完成特定的角度,整個(gè)過(guò)程只有 5 秒左右。

對(duì)于這些未知的物理特征,SwingBot 也能成功完成指定動(dòng)作,王辰稱,最終的誤差僅在 10 度左右。

圖|定量評(píng)價(jià)預(yù)測(cè)模型與物理嵌入的結(jié)果
研究人員證實(shí)了借助這種融合模型,可以將多個(gè)探索動(dòng)作獲取的信息組合到一個(gè)聯(lián)合嵌入空間中,以端到端的自我監(jiān)督方式來(lái)訓(xùn)練機(jī)器人,最終 SwingBot 能夠很好地完成甩筆動(dòng)作。此外,該研究還表明,學(xué)習(xí)到的面向任務(wù)的特征嵌入也可以成功地回歸個(gè)體的物理特性,如質(zhì)量、質(zhì)心、慣性矩和摩擦。
關(guān)于未來(lái)的研究方向,王辰說(shuō)道,“甩筆是一個(gè)比較簡(jiǎn)單直觀可以理解的一個(gè)例子,但是這個(gè)觸覺(jué)分析的能力未來(lái)可以用在很多其他的任務(wù)上,不僅不單單只是這樣的一個(gè)甩筆任務(wù)。”
兩位一作
一次暑期研究的機(jī)會(huì),二人通過(guò)郵件結(jié)識(shí)。就這樣,今年夏天剛剛從上海交通大學(xué)畢業(yè)的王辰和 MIT 計(jì)算機(jī)科學(xué)系在讀博士生王少雄開(kāi)始了這次長(zhǎng)達(dá)六個(gè)月的合作,而他們本身也都十分優(yōu)秀。
圖|王辰
王辰在今年獲得了上海交通大學(xué)計(jì)算機(jī)科學(xué)學(xué)士學(xué)位,師從盧策吾教授。大學(xué)期間,王辰也參與了多次實(shí)習(xí)項(xiàng)目,他在 2018 年 6 月至 2019 年 8 月?lián)嗡固垢4髮W(xué)的研究實(shí)習(xí)生,Silvio Savarese、朱玉可和李飛飛都是他的導(dǎo)師。他還在 2018 年 1 月到 5 月期間參與 “Transferable Force-Torque Dynamics Model for Peg-in-hole Task” 項(xiàng)目的研究,研究成果也提交到了 IROS 2019。接下來(lái),王辰即將前往斯坦福大學(xué)繼續(xù)攻讀計(jì)算機(jī)科學(xué)博士學(xué)位。
圖|王少雄
王少雄本科就讀于清華大學(xué)計(jì)算機(jī)科學(xué)與技術(shù)系,師從唐杰。畢業(yè)后他去到 MIT 繼續(xù)深造,目前是 MIT 計(jì)算機(jī)科學(xué)系在讀博士生。從 2016 年至今,王少雄共發(fā)表了六篇論文,除了本次的 SwingBot 項(xiàng)目獲得了 IROS 2020 最佳論文獎(jiǎng),今年 7 月他參與的研究的 “操縱電纜機(jī)器人” 項(xiàng)目(Cable Manipulation with a Tactile-Reactive Gripper)也入圍了機(jī)器人領(lǐng)域國(guó)際頂級(jí)會(huì)議 RSS 2020 最佳論文。
圖|操縱電纜機(jī)器人
最后,提到對(duì)于 AI 發(fā)展的前景以及對(duì)于通用人工智能(AGI)的暢想,二人直言沒(méi)有想那么遠(yuǎn)。“我們更多希望看到的是有一個(gè)實(shí)際的問(wèn)題,然后知道這個(gè)問(wèn)題的難點(diǎn)在哪里,如何去解決它。因?yàn)槠鋵?shí)當(dāng)下對(duì)于機(jī)器人控制的話,還有很多問(wèn)題沒(méi)有解決,遠(yuǎn)還沒(méi)有到去思考 AI 會(huì)不會(huì)像人一樣,總歸是一步步來(lái)。” 王辰說(shuō)道。
責(zé)任編輯:lq
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28615瀏覽量
207903 -
人工智能
+關(guān)注
關(guān)注
1793文章
47601瀏覽量
239510 -
觸覺(jué)傳感器
+關(guān)注
關(guān)注
4文章
86瀏覽量
9383
原文標(biāo)題:機(jī)器人有 “觸覺(jué)” 了!上交&MIT發(fā)明一款機(jī)器人,自己拿起筆就能甩|IROS 2020最佳論文
文章出處:【微信號(hào):deeptechchina,微信公眾號(hào):deeptechchina】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
如何選擇掃描電鏡的分辨率?

HDMI接口支持哪些視頻分辨率
成本400元,DIY一個(gè)高刷新率熱成像相機(jī)
Meta正努力推進(jìn)人工智能觸覺(jué)傳感器的市場(chǎng)化進(jìn)程
觸覺(jué)傳感器的發(fā)展,對(duì)機(jī)器人產(chǎn)業(yè)有什么影響?
高速、高分辨率光傳感器的價(jià)值

VR顯示器分辨率的選擇
伺服編碼器分辨率是什么意思
伺服電機(jī)編碼器的分辨率是多少
高管洞察:高分辨率音樂(lè)需要高分辨率揚(yáng)聲器

伺服編碼器分辨率越高越快嗎?

像素大小和相機(jī)分辨率

編碼器分辨率是什么意思 編碼器分辨率和脈沖數(shù)的關(guān)系

臺(tái)階儀:亞埃級(jí)垂直分辨率,領(lǐng)跑新材料納米加工的測(cè)量利器!
人形機(jī)器人之關(guān)鍵觸覺(jué)傳感器:剛性到柔性






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論