 步進電機與伺服驅動器促進工業應用系統更加智能化
步進電機與伺服驅動器促進工業應用系統更加智能化
在越來越低的生產成本的推動下,BLDC電機在各個領域都越來越受歡迎。尤其是引入了無人駕駛飛機和電動自行車之后,BLDC電機就開始量產,而BLDC電機曾經是高端工業應用的專用設備。同時,通過即插即用構建模塊提供硬件中的磁場定向控制或矢量控制,曾經復雜的伺服驅動器的開發變得更加容易。雖然這種結合可以實現包括醫療和保健設備在內的一系列新應用,但我們不要忘記步進電機。
與伺服驅動器相比,步進電機對許多工程師而言似乎不如前者。但是,步進電機控制已經從簡單的“無需調整”控制方案走了很長一段路。當然,對于某些應用程序,您仍然可以輕松地驅動步進電機而不會出現問題,但是越來越多的高端應用程序取決于步進電機提供的低速高扭矩。從實驗室自動化到半導體處理,從3D打印到4K監控攝像機,這些電機的機械特性使工程師無需額外的變速箱即可實現驅動系統。沒有變速箱意味著更少的磨損,更少的噪音和更低的制造成本。
盡管以低成本提供了魯棒性和精度,但步進電機仍然享有嘈雜,引入振動且效率不高的美譽。過去使用的驅動程序解決方案的傳承一點都不復雜。然而,與此同時,微步操作與復雜的電流斬波器甚至電壓斬波器相結合,可以在自適應電流的情況下實現平穩,無噪聲的操作。加上診斷功能和無跳動的優點-意味著在靜止狀態下完全沒有運動-突然之間,對于要求完美運動控制的應用,您有了行業領先的解決方案。對于那些需要閉環操作的應用,可以添加編碼器,該編碼器可以是單個基于霍爾的組件,
就像過去二十年來電機控制發生了變化一樣,開發該應用程序的普通工程師也是如此。如今,普通工程師希望專注于使他們的設備獨樹一幟,而不是開發看似復雜的驅動系統。最小的外形尺寸,直觀的用戶界面,實時功能,功能安全以及與云收集和共享數據的時尚設計是工程師的新重點。坦率地說,普通工程師甚至可能將電動機和運動控制視為必不可少的弊端,阻礙了他的思想及其構想。這就是為什么直觀的開發工具包是關鍵的原因。
不幸的是,用開發套件支持電機并不是那么容易。原因很簡單:每個電動機都不相同。電機參數不同,極數不同,反饋系統(如果有)不同,并且可能需要針對特定??用例對電機進行優化和微調。而且,這甚至都沒有考慮到各種外部接口,也需要考慮這些接口。因此,“一刀切”的解決方案通常無法正常工作,該解決方案通常由具有特殊電機控制庫的微控制器與通用驅動器板組成。變量太多了。
這就是為什么現已成為Maxim Integrated一部分的TRINAMIC Motion Control提供了廣泛的開發板作為其模塊化評估系統的一部分的原因,并且該公司在支持該系統的軟件,工具和向導上進行了大量投資的原因。這些板允許快速設置原型應用程序,因此普通工程師可以嘗試不同的設置并微調實現他們的想法所需的驅動系統。一旦設置適合其獨特的用例,就可以輕松地用C語言編譯和導出代碼,以直接在其自己的固件中使用。至于硬件,開發板經過MIT許可,是經過驗證的開源設計,這意味著它們可以免費使用而不必共享結果。
因此,無論是直接復制還是(部分)用于新設計,模塊化評估套件均經過優化,可縮短設計周期,并使電機和運動控制輕松達到1-2-3的要求,符合Trinamic的愿景。他們的基準不是其他半導體公司提供的解決方案。相反,他們的基準測試為公司提供了復雜而直觀且易于使用的解決方案,可將數字信息轉換為完美的物理運動,因為工程師今天希望如此,因此他們可以專注于他們的核心專業知識。
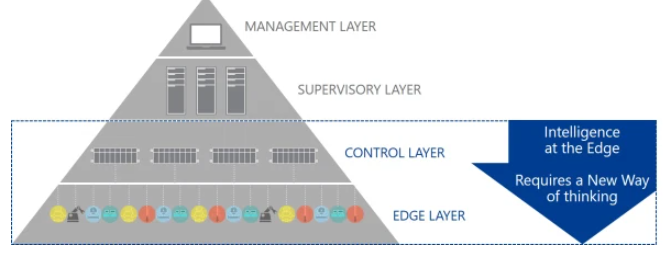
圖1:管理層
對于未來的電機和運動控制,與最終可靠性的需求相關的日益復雜性將導致系統更加智能-這需要處于分散的邊緣。需要實時做出決策,需要在源頭收集數據并在云中共享數據。第二個大趨勢是功能安全,這是機器人從其籠子中釋放出來并與人類并排操作的邏輯結果,這些機器人既可以作為協同機器人,也可以作為獨立的機器人使用,從取放設備到吸塵器不等。為了實現這些趨勢,需要開發新的硬件,以減輕處理器的實時關鍵任務負擔,同時實現更多的診斷,預測性維護和AI并啟用功能安全的系統。
編輯:hfy
-
機器人
+關注
關注
211文章
28618瀏覽量
207916 -
電機控制
+關注
關注
3539文章
1893瀏覽量
269116 -
步進電機
+關注
關注
151文章
3118瀏覽量
147715 -
BLDC電機
+關注
關注
7文章
214瀏覽量
21598 -
伺服驅動器
+關注
關注
22文章
488瀏覽量
31717
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論