 波士頓動力足立式機器人的自我回正方法
波士頓動力足立式機器人的自我回正方法
波士頓動力發明的足立式機器人,借助于多個傳感器以及控制算法,設計了具有低重心、易回正的硬件結構,實現了具有魯棒性的機器人自我回正。
2019年9月,波士頓動力發布了關于機器狗 Spot 的視頻,視頻中展示了機器狗在各種地形中的出色避障表現,并且不僅可以避開障礙物,而且還可以在極端的環境中保持平衡。
我們知道,機器人尤其是四足以及雙足機器人,其研發難點就在于如何保持機器人的平衡,雖然有了陀螺儀等多種傳感器設備進行數據采集,但是要研發一套具有魯棒性的平衡性系統并不容易,機器人在行走過程中極有可能會滑倒或者翻倒,而機器人要進行回正也非常困難且耗時。
因此,波士頓動力在15年6月24日申請了一項名為“用于機器人自我回正的系統和方法”的專利(申請號:201580033194.8),申請人為波士頓動力公司。
根據目前該專利公開的資料,讓我們一起看看波士頓的這項機器人自我回正方法吧。
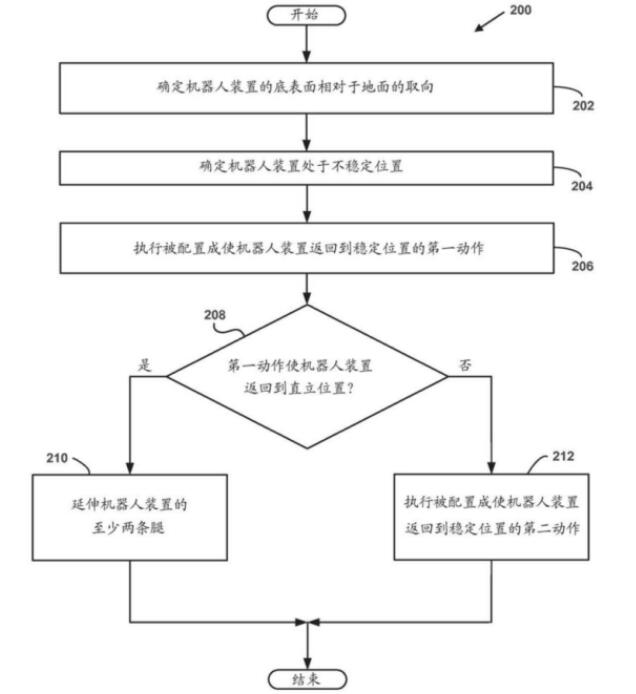
如上圖,為這種回正方法的流程圖,系統中的硬件主要包括:機械系統120、傳感器系統130和控制系統140,而系統的實現也借助于多種傳感器,例如:體載傳感器、2D/3D傳感器以及機械腿傳感器等,機械腿傳感器可以檢測機械腳是否與地面接觸。
首先,系統需要確定機器人裝置的底表面相對于地面的取向,這是因為機器人在進行行走、俯仰、側滾以及橫擺等動作時,其與地面接觸的部分會發生變化,因此可以利用這種變化進行下一步的判斷。
當機器人處于不穩定的位置時,可以通過其質心的位置來確定機器人的腳的位置,根據機器人自身與腳的相對位置關系,就可以判斷機器人是否可以進行站立,從而恢復到穩定的狀態,對于四足機器人來說,如果想要恢復到穩定狀態,則需要不斷調整腿部的位置,從而支撐身體重新站立起來,例如下圖所示。
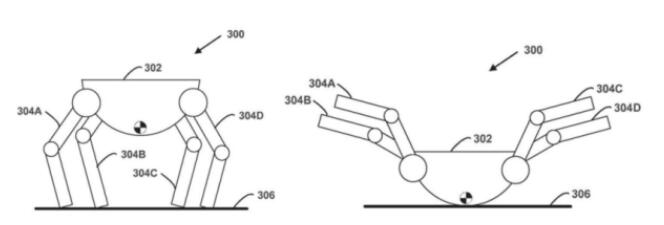
可以看到,上圖左側為機器人站立時的姿態,其為具有四條腿的四足機器人,質心靠近機器人的底表面,這樣有利于機器人保持平衡。而其底部被設置為U形,這樣就的好處在于當機器人位于其側面上時,本體可以很自然的傾向于滾動到穩定位置。
而如上圖右側所示,為機器人處于不穩定狀態,這種不穩定狀態可以通過機器人身上布置的傳感器進行檢測,可以看到在這種情況下,機器人的腿部朝上,不能夠維持正常的平衡狀態。此時就需要借助于腿部的運動,來使機器人重新恢復穩定。
在確定機器人的腳的位置后,可以不斷的調整機器人的腿部姿態,例如將第一側上的每一條腿從第一位置移動到第二位置等,以此來使得機器人回正。最后還需要對最終狀態進行檢測,判斷機器人是否回到了穩定位置,這也是由機器人身上分布的傳感器來實現的。
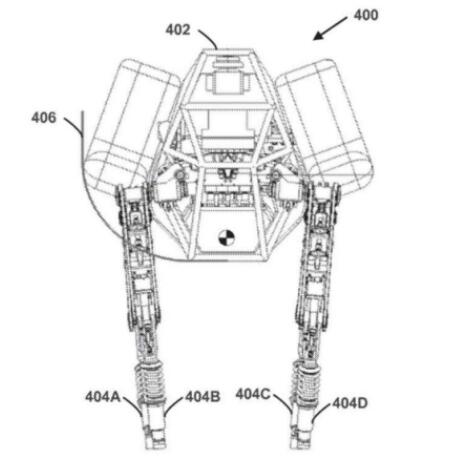
如上圖,為完整的機器人結構示意圖,其具有四條腿,本體具有較低的質心,底表面如上面介紹的那樣具有輪廓406,可以使得機器人裝置的重力勢能基于機器人的穩定位置而減少,并且可以完成上述的自我回正動作。
以上就是波士頓動力發明的機器人自我回正方法,波士頓動力公司演示的機器人視頻中,機器人均具有非常出色的自我回正表現,這依靠的不僅僅是例如上述這樣的自我回正方法,在機器人程序設計中,也包含著非常多的平衡性算法,正是依靠著出色的算法控制以及精細的機器人結構設計,才能夠帶來如此出色的機器人,而波士頓動力的四足機器人也已經商用化,將給用戶帶來更大的價值。
責任編輯:YYX
-
機器人
+關注
關注
211文章
28632瀏覽量
208002 -
傳感器系統
+關注
關注
0文章
37瀏覽量
12788 -
四足機器人
+關注
關注
1文章
92瀏覽量
15243
發布評論請先 登錄
相關推薦
Atlas轉型電驅,純電+AI正在加速通用人形機器人落地

四足機器人的結構、控制及運動控制

四足巡檢機器人特點和作用是什么

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
開源項目!OpenCat—— 一個全能的平價四足機器人
在NVIDIA Isaac Lab中訓練四足機器人運動

直線電機生產廠家談人形機器人迎來新奇點

波士頓動力人形機器人Atlas電動版亮相:前沿技術迎來新時代






 工商網監
工商網監
評論