 基于硬件的車載攝像頭車道偏離預警系統仿真測試方案
基于硬件的車載攝像頭車道偏離預警系統仿真測試方案
為了更加高效地完成車載前視攝像頭車道偏離預警系統功能的測試驗證, 提出了一種車載攝像頭在環的仿真測試方案。將某量產車載攝像頭集成于硬件在環實時仿真系 統并通過 CAN 通道實時通訊,借助場景建模軟件實現不同道路、天氣、能見度等仿真工況的搭建, 然后通過自 動化測試軟件,進行全局測試用例的配置,以檢測該攝像頭車道偏離 預警系統的性能。
結果顯示:該仿真測試方法能較好地實現攝像頭功能邏輯及性能測試試驗, 不同工況下攝像頭的性能差別較大,為后期該攝像頭車道偏離預警系統的優化及實車測試提供了參考。
先進駕駛輔助系統( ADAS) 是汽車智能化的重要一環,包括前向碰撞預警( FCW) 、自 適應巡航( ACC)、車道偏離預警系統( LDW) 等 , 在提高行車安全、緩解交通擁堵等方面具有重要的實用意義。
其中, 車道偏離預警系統主要依靠車載視覺傳感器完成車道線的檢測, 當駕駛員出 現無意識偏離行為時, 通過報警來引起駕駛員 的注意,以保證車輛的行駛安全。
對于車道偏離預警系統功能的測試驗證, 大多通過受控場地試驗來完成,但是存在人力和物力成本較大、試驗過程繁瑣且對車輛控制要求較高的不足, 尤其是一些特殊場景難以重復性再現。
硬件在環測試方法作為在環測試的一個重要環節,實現了車輛 ADAS 功能 V 型開發流程中模型在環、軟件在環與整車在環的有效銜接。各種在環測試方法在 V 型開發流程中的應用也使得車輛 ADAS 功能開發驗證更加系統高效 。國內外研究人員在相關方面做了較多研究 。
本文則提出了一種基于 NI 實時仿真系統的車載攝像頭車道偏離預警系統的仿真測試方法, 通過搭建包含視頻暗箱、CAN 通信等在內的硬件在環仿真平臺,完成了對某量產車載攝像頭車道偏離預警系統功能邏輯及性能參數的仿真測試驗證工作,找出該攝像頭存在的不足, 使其后期優化完善更具針對性。
01、攝像頭在環測試系統搭建
為了完成車載攝像頭車道偏離預警系統仿真測試研究,本文搭建了一套攝像頭在環仿真測試系統,其主要由 NI PXI 實時仿真系統、高精度車輛動力學模型、高保真場景模型、待測攝像頭、視頻暗箱、CAN 信號模塊、可編程電源以及自動化測試軟件組成,系統框圖如圖 1 所示。
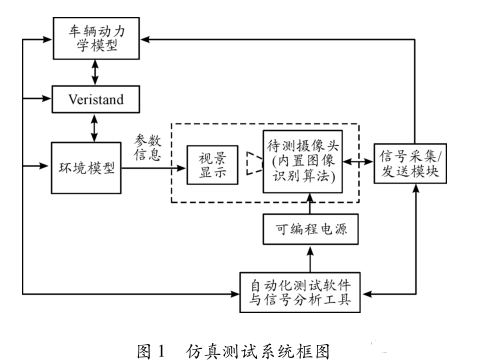
Veristand 是 NI 公司針對 PXI 實時仿真測試系統而開發的軟件環境, 用來配置相關板卡的輸入輸出、部署車輛動力學模型, 并完成相關參數接口的映射連接。通過該軟件設計車道偏離系統監控界面從而實時監控測試車輛相關狀態參數。
高精度動力學模型在 PXI 實時仿真系統中運行, 實時再現仿真車輛的動力學特性。測試環境模型主要通過高保真場景建模軟件搭建, 可自由配置天氣、能見度等環境因素并模擬不同的交通狀況, 完成某些危險或難以進行重復性測試的場景再現,相關環境模型通過視景顯示裝置作為攝像頭的采集輸入。
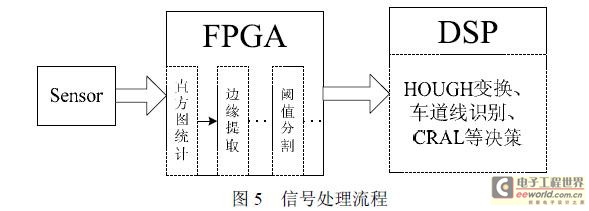
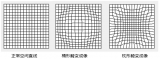
為了更好地貼合測試規程要求, 避免道路兩側其他物體的干擾, 基本環境效果如圖 2 所示;攝像頭采集部分包含待測攝像頭、視景顯示及暗箱,通過實時拍攝場景模型畫面完成對車道信息的采集,如圖 3 所示;可編程電源則為攝像頭上下電提供電源支持;自動化測試用例及流程配置主要通過自動化測試軟件實現, 同時結合 CAN 信號分析工具, 完成對車道線識別以及車道偏離預警信號的提取與分析。
測試時, 車速信息由 高精度動力學模型通過CAN 通道發送至攝像頭以激活車道偏離系統。暗箱中的待測攝像頭實時拍攝環境模型所展示的場景畫面并完成車道線信息的采集。如圖 4 所示,可以直觀監測到環境狀況以及車道線識別情況,如果車道線被檢測到且沒有報警, 則檢測到的車道線為綠色,報警時為紅色。
同時,將車道識別信息或偏離預警信息發送至使用 Veristand 所設計的車道偏離預警系統監控界面,控制攝像頭的供電、發動機點火及 LDW 系統的開關,監控車輛的速度、航向角、與車道線的距離及是否 報警等信息, 便于實時了 解車輛及LDW 系統的工作狀態, 如圖 5 所示。
自動化測試軟件則按照所編寫的測試用例調配環境模型參數并實時監測車輛和攝像頭的狀態信息, 實現不同測試流程的切換及測試結果的判斷。
02、測試試驗流程設計
在對具有車道偏離預警系統的量產攝像頭進行測試時,要重點關注其車道識別及偏離報警的穩定性、準確性,可參照中國汽車工程研究院股份有限公司( 簡稱中國汽研) 國家智能汽車集成系統試驗區( i - VISTA) 發布的《車道偏離預警系統試驗規程》進行標準性能試驗。
同時, 參照其功能定義完成功能邏輯測試, 更進一步分別設計不同天氣、路面積水、能見度等情況下的環境模型,實現更深入的環境適應性測試。最后, 借助自動化測試軟件快速高效地依次完成所設計的性能試驗、功能邏輯試驗及環境適應性試驗。
2.1性能試驗
性能試驗是中國汽研針對智能網聯汽車發布的中國智能汽車指數體系中的重要試驗。本文參照該體系中的《車道偏離預警系統試驗規程》對待測攝像頭進行測試, 檢驗標準工況下其基本性能表現。該試驗規程設計試驗工況如表 1 所示, 車道偏離試驗方法示意圖如圖 6 所示。
2. 2功能邏輯試驗
功能邏輯試驗重點關注攝像頭的邏輯狀態,檢測其在要求條件下能否實現 LDW 系統不同狀態的轉換,其狀態轉換邏輯如圖 7 所示。
在該試驗中, 利用可編程電源模塊對攝像頭進行供電,通過實時系統的模擬信號板卡設計系統狀態邏輯圖中的各種狀態供電情況測試用例,分別設置并控制電源開關、發動機點火開關、LDW系統開關以及車速等參數來驗證其狀態邏輯切換是否合理。
主要針對攝像頭上下電、系統開啟 /關閉、系統激活 /退出 3 種邏輯轉換進行測試, 具體試驗工況如表 2 所示。
2. 3 環境適應性試驗
性能試驗中天氣狀況良好, 針對典型工況對攝像頭的基本功能進行試驗。環境適應性試驗重點關注不同天氣環境下攝像頭車道識別及偏離報警的準確性、穩定性。
在環境適應性試驗中, 道路結構、車道線規格以及偏離速度等與性能試驗一致,主要增加不同的天氣環境模型, 模擬實車試驗中較難重復性驗證的雨雪霧等天氣狀況以檢測其識別率,不同天氣環境模型如圖 8 所示。
2. 4 自動化測試用例設計
針對攝像頭車道偏離預警系統進行不同工況的測試,一方面要兼顧不同工況的測試與監控, 另一方面要在保證測試準確性的基礎上提高測試效率。本文借助自 動化測試軟件編制不同測試工況的測試流程及評價標準, 提高其測試效率。
在測試過程中,自 動化測試軟件按照編制的測試用例依次調用不同試驗工況的環境模型, NI 實時仿真系統中的攝像頭信號及車輛狀態信息也接入該軟件,從而實現相關參數信息的實時監測, 并判斷其是否通過測試標準要求。
自動化測試用例設計如圖 9 所示。以左彎道高速左偏離工況為例, 試驗開始部分主要是加載車輛動力學模型和仿真環境模型, 并開始記錄相關參數;攝像頭參數設置主要是對標攝像頭的安裝位置及視角等參數;環境參數設置主要控制環境模型的天氣、道路等狀況;
然后根據攝像頭輸出的 CAN 報文獲取攝像頭 ECU 的狀態信號, 判斷LDW 系統是否正常激活;如果系統正常激活則進入報警信號監測, 通過 CAN 報文信號判斷車道偏離時是否產生報警信號;
監測到報警信號后立即進行下一步, 讀取車輛的橫向偏離速度判斷其是否處于規定的速度范圍內, 最后終止該工況并自動進入下一工況進行測試。以此方法設計全局測試用例,涵蓋基本功能邏輯試驗、性能試驗以及環境適應性試驗,并生成所需測試報告, 實現車道偏離預警系統的自 動化測試。
03、測試結果及分析
3.1性能試驗
在性能試驗中,每種測試工況測試4 次,直道可重復性試驗共進行 16 次,測試結果如表 3 所示。
測試中,直線低速、高速偏離工況全部正常通過,結果如圖 10、11 所示, 當車輪輪距在 - 0. 1 ~0. 1 m 范圍時,均可及時產生報警信號。
進行左偏離試驗時重點關注左輪與左側車道線的距離以及在規定距離范圍內是否有報警信號產生, 如果有報警信號產生則要驗證其橫向偏離速度是否處于規定的速度區間內, 右偏離時則重點關注右輪與右側車道線的距離,同時監測報警信號、橫向偏離速度及報警時車輪距等信息。
圖中縱軸為信號軸,未標明量綱, 數
值可分別用于報警信號、輪距和偏離時的橫向速度, 報警信號為 0 - 1 信號, 輪距單位為 m,偏離速度單位為 m/s, 并對其取絕對值。本節其他信號圖與此相同。
彎道可重復性試驗共進行 32 次, 測試結果如表 4 所示。
低速左/右偏離工況均能全部通過, 未作具體分析。高速偏離工況中左彎道右偏離和右彎道左偏離時攝像頭識別效果不佳,在 4 次試驗中均有 1次未能及時報警,車道偏離系統測試信號如圖 12、13 所示。
圖 12( a) 為左彎道高速左偏離工況, 左輪距約為 0 時正常報警。圖 12( b) 為左彎道高速右偏離工況,當車輛右側偏離時車道線識別不穩定導致其未能正常報警。圖 13( a) 為右彎道高速右偏離工況,在右輪距約等于 0 時正常報警。
圖 13( b)為右彎道高速左偏離工況, 出現了與左彎道高速右偏離相同的情況。從攝像頭實時畫面來看,2 個未報警工況中車輛發生偏移時, 相對運動導致彎道車道線圓弧快速偏向車輛一側, 識別效果較差且不穩定。
通過性能試驗, 對待測攝像頭在典型工況中的基本性能結果進行了驗證分析。其中直道工況中,道路結構簡單,車道線均可有效識別并在偏離時及時報警;彎道工況中, 車道線識別不穩定, 特別是在左彎道高速右偏離及右彎道高速左偏離兩種高速反向偏離工況中, 不能及時報警, 為后期實車驗證及攝像頭算法優化提供依據, 提高產品開發及測試效率。
3. 2 功能邏輯試驗
攝像頭上下電測試時, 蓄電池電源和 LDW 系統開關處于開啟狀態, 車輛靜止, 控制發動機點火信號的開閉來檢測 LDW 系統的狀態。如圖 14 中虛線框所示, ( a) 中 設置發動機點 火信號為開,LDW 系統狀態變為 1, 即待機狀態;( b) 中設置發動機點火信號為關,LDW 系統狀態變為 0, 即斷開狀態。測試結果表明, 攝像頭上下電切換滿足測試要求。
LDW 系統開關測試時信號如圖 15 所示,其中( a) ( b) 工況下, 車輛均處于靜止狀態, 蓄電池電源和發動機點火信號處于開啟 狀態, LDW 系統開關信號為脈沖信號, 下降沿觸發。( a) 中, LDW 系統處于關閉 狀態, LDW 系 統開關未 開啟, 設置LDW 系 統開關為 開啟, 如 虛 線 框內 變化所示,LDW 狀態變為 1,即待機狀態。
( b) 中, LDW 系統處于待機狀態,LDW 系統開關開啟, 設置 LDW 系統開關為關閉, LDW 系 統狀態變為 0, 即關閉狀態。( c) 中,設置車輛速度為 65 km/h, LDW 系統狀態變為 2, 即激活狀態, 此時關閉 LDW 系統開關,如虛線框內變化所示, LDW 系統狀態變為 0,即關閉狀態。
測試結果表明, LDW 系統開關可以滿足要求,控制 LDW 系統狀態切換。LDW 系統激活 /退出測試結果如圖 16 所示,( a) 中,當縱向車速達到 60 km/h 時, 如虛線框內變化所示, 激活狀態發生突變, LDW 系統激活;
( b) 中,當縱向車速達到 55 km/h 時, 激活狀態發生突變, LDW 系 統處于待機狀態。測試結果表明,當車輛速度發生變化時, 雖激活狀態信號有稍許延遲, 但 LDW 系 統能夠自 動激活或者退出激活,滿足要求。
3. 3 環境適應性試驗
進行環境適應性測試時, 將測試環境復雜化,重點驗證路面積水、雨雪霧等工況下攝像頭的識別效果。其中, 當路面存在積水時極易導致攝像頭的車道識別功能出現誤判, 進而嚴重干擾車道偏離預警系統的正常工作。
主要表現在攝像頭誤把積水識別為車道, 在整個動態測試中車道線識別跳動較為嚴重,如圖 17 所示。圖 17( a) 為攝像頭在環仿真存在路面積水的工況下攝像頭誤識別車道線的實時畫面, 在整個試驗過程中識別誤差較大;
圖 17( b) 是實車測試車道偏離預警系統時出現的虛警情況, 與仿真工況一致。在霧天環境下,攝像頭仍能較好識別, 不做過多闡述;而在雨雪天氣中,因為難以仿真雨雪落在攝像頭鏡頭上的工況,所以重點關注當車速較快或雨雪較大而車輛與雨雪的相對運動導致飄落的雨雪近似成一條直線的情況, 分別設置不同的車速和雨雪量進行試驗,結果表明有較小概率造成誤識別, 但仍是攝像頭優化時的考量因素。
結束語
基于硬件在環仿真平臺對車載攝像頭車道偏離預警系統進行了在環仿真測試方法研究, 針對某量產車載攝像頭設計了從其基本功能邏輯到其具體性能的測試用例, 并完成了仿真測試。
在硬件在環測試中發現了其在彎道工況中高速反向偏離時容易出現車道識別丟失、虛警或者不報警的情況,特別是在存在積水的路面上行駛時, 車道線識別跳動較大,誤警較多, 與實車車道偏離系統采集的數據情況一致, 如不及時優化則容易影響駕駛員駕乘判斷及體驗。
試驗結果證明,基于硬件在環仿真平臺的車道偏離預警系統仿真測試方法能夠高效、安全且可重復性地完成相關測試驗證, 發現存在的不足,為后期攝像頭算法優化及實車試驗提供參考,便于更加快速發現問題、解決問題。
在對攝像頭進行更進一步的性能測試的試驗中,雖然模擬出了雨雪霧天氣環境, 但是無法有效模擬雨滴或雪花落在攝像頭采集鏡頭上時的情況,故在后期研究中將重點關注該問題并尋找更加科學的解決方法, 從而提高該仿真測試方法的覆蓋度、逼真度。
編輯:hfy
-
預警系統
+關注
關注
0文章
277瀏覽量
16145 -
adas
+關注
關注
309文章
2193瀏覽量
208781 -
車載攝像頭
+關注
關注
5文章
138瀏覽量
28110
發布評論請先 登錄
相關推薦
怎么設計基于FPGA的車道偏離預警系統?
基于機器視覺的車道偏離預警系統的實現
基于機器視覺的車道偏離預警系統的實現
自動駕駛推動汽車行業需求 未來單車多攝像頭將成為趨勢
關于車道偏離預警系統和前碰撞預警系統分析介紹和應用
攝像頭在汽車上的輔助駕駛功能是如何實現的?
ADAS車道偏離檢測技術






 工商網監
工商網監
評論