 如何制作可跟蹤200Hz脈沖紅外光源的攝像機支架
如何制作可跟蹤200Hz脈沖紅外光源的攝像機支架
步驟1:材料和設備
所需的設備
熱膠槍
旋轉工具
烙鐵
剪線鉗
材料
相機支架 》
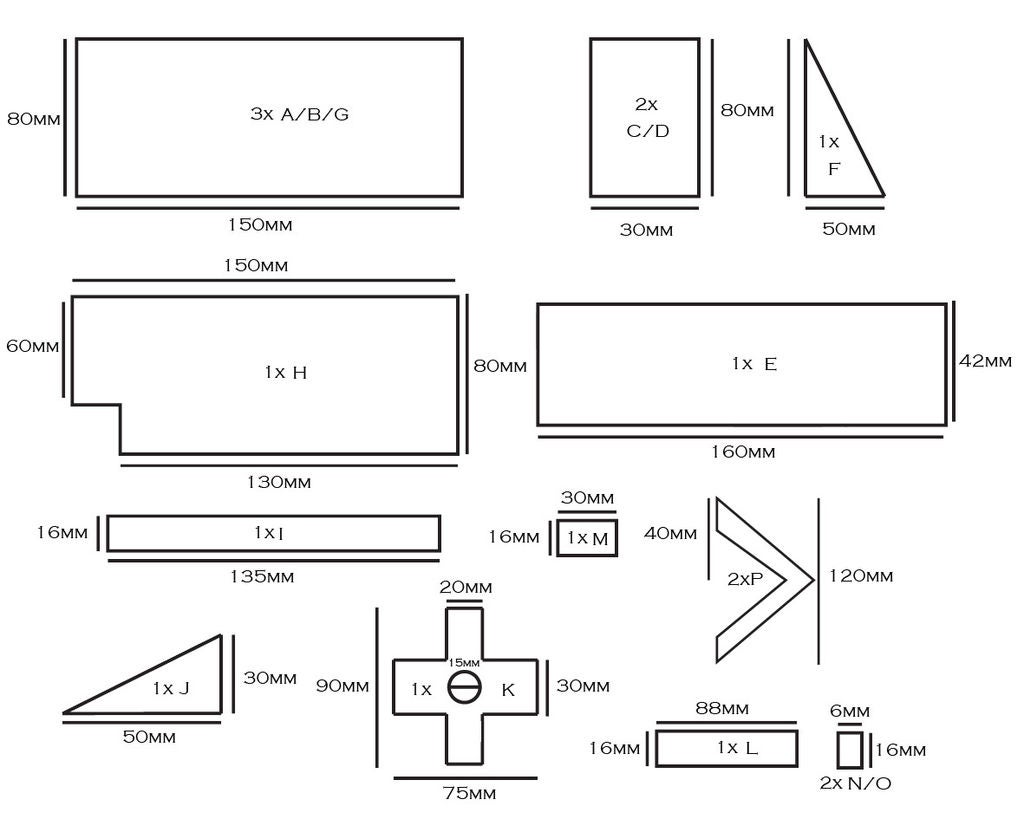
MDF板1200x600x60mm裁切成大小(所有件,上面顯示的尺寸)
2 Tower Pro Micro 9g伺服器
膠棒(用于熱膠槍)
跟蹤系統
4個10K歐姆電阻
1個小型原型PCB
8 400mm長,輕型連接線(紅色)
2 150mm長,li ght接線(一紅一黑)
4 100mm長,輕型接線(黑)
1 Arduino Uno R3
紅外信號源
9個標準紅外LED
1個用于LED的原型PCB板-切成尺寸(25x30mm)
1個用于微型放大器的原型PCB板-切成尺寸(25x40mm)
1個40mm熱縮管(切入一半,長度方向)
1小安全銷
2 750毫米長,輕巧的接線
1 4針端子
2 BC547晶體管
1 400ohm電阻
2 30mm電線鏈接(一個紅色一個黑色)
1 Arduino Uno R3
1顆6xAA電池座
6節AA電池
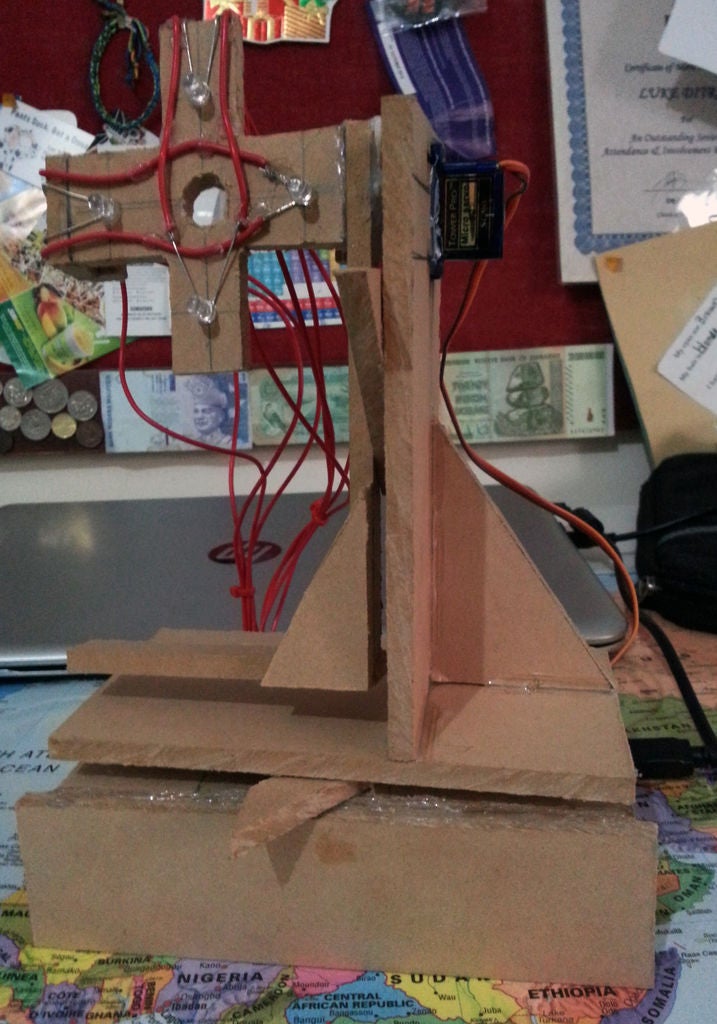
步驟2:構建底座


此相機支架由6mm MDF制成,雖然重量較輕,但較薄的板可能更好。
方法
在MDF板上標記并切出所有碎片(測量結果如上所示)
一旦所有零件都開始,首先要建立基礎
將側面零件(C和D)粘貼到底板(A)上,然后將前面板(E)粘上。
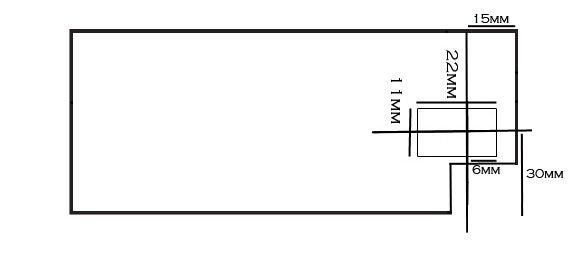
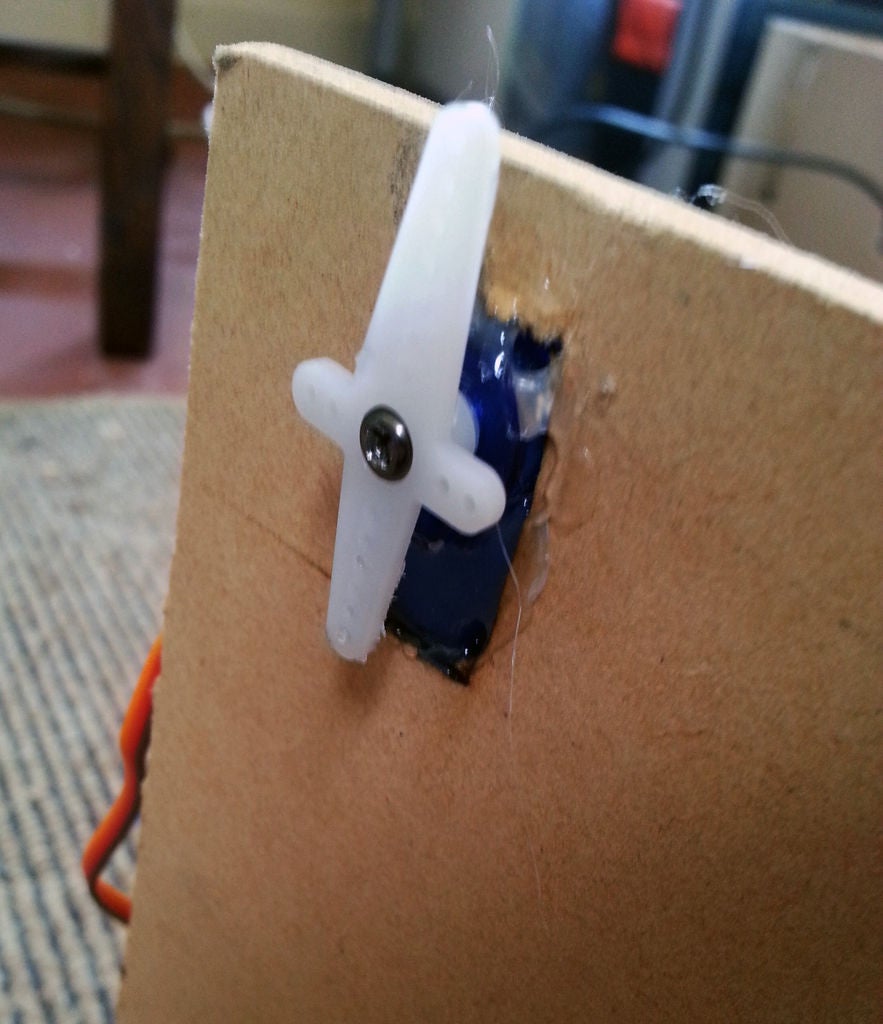
從零件B上切出一個伺服孔(使用旋轉工具)-參見測量圖
將伺服1的膠粘到孔(B)中,螺絲孔將在內部
將頂部的膠粘在底座上
將旋轉的板F,G,H粘在一起(在H部看到的缺口在圖片中看不到,因為后來添加到了讓更多的光線進入右側的光電晶體管),確保已從H片上切出伺服孔(使用旋轉工具)。
將伺服2膠粘到切成H的孔中。
將相機支架(手機支架)I,J,K,L,M,N,O粘合在一起。 N和O分別放在M和I的背面,以將手機固定在適當的位置(如圖所示)。
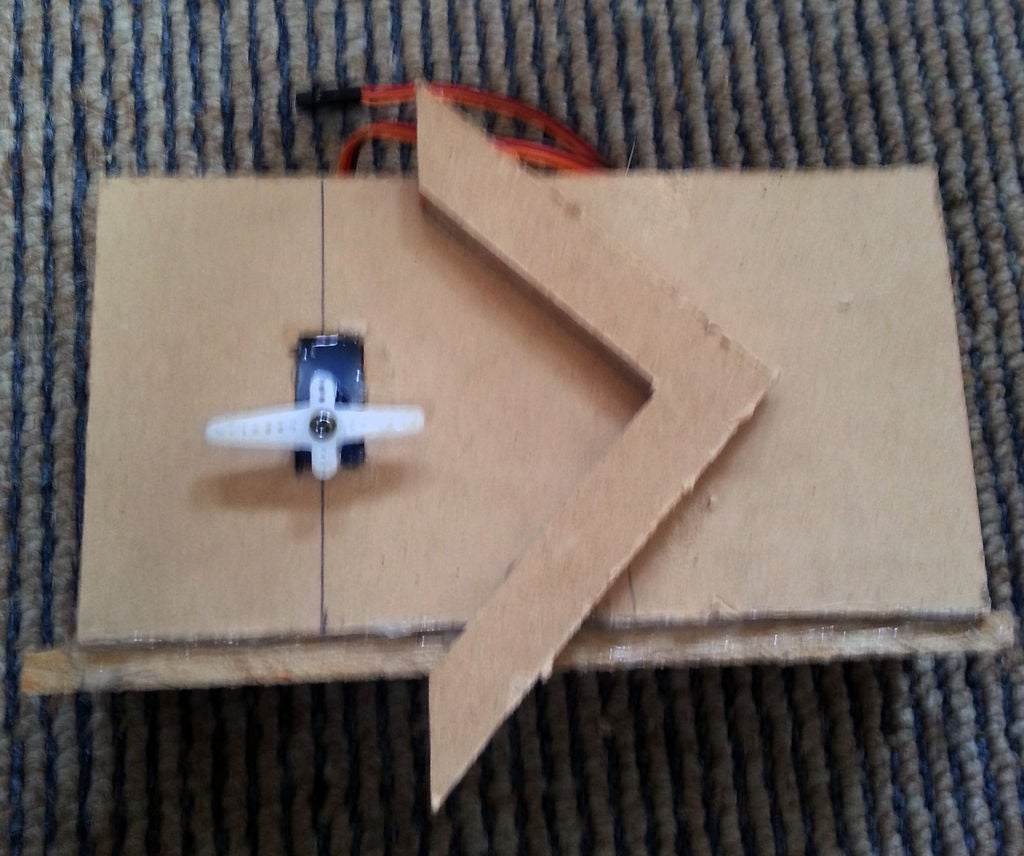
將箭頭形的轉子導向器粘在B片和H片上。箭頭指向B片的末端40mm,H片的底部60mm(如圖所示) 。
將一個伺服臂擰到每個伺服器上。確保長度方向處于整個運動范圍的中間。
將伺服1的手臂粘在板G上,將伺服2的手臂粘在I板上
相機安裝完成!
步驟3:跟蹤系統




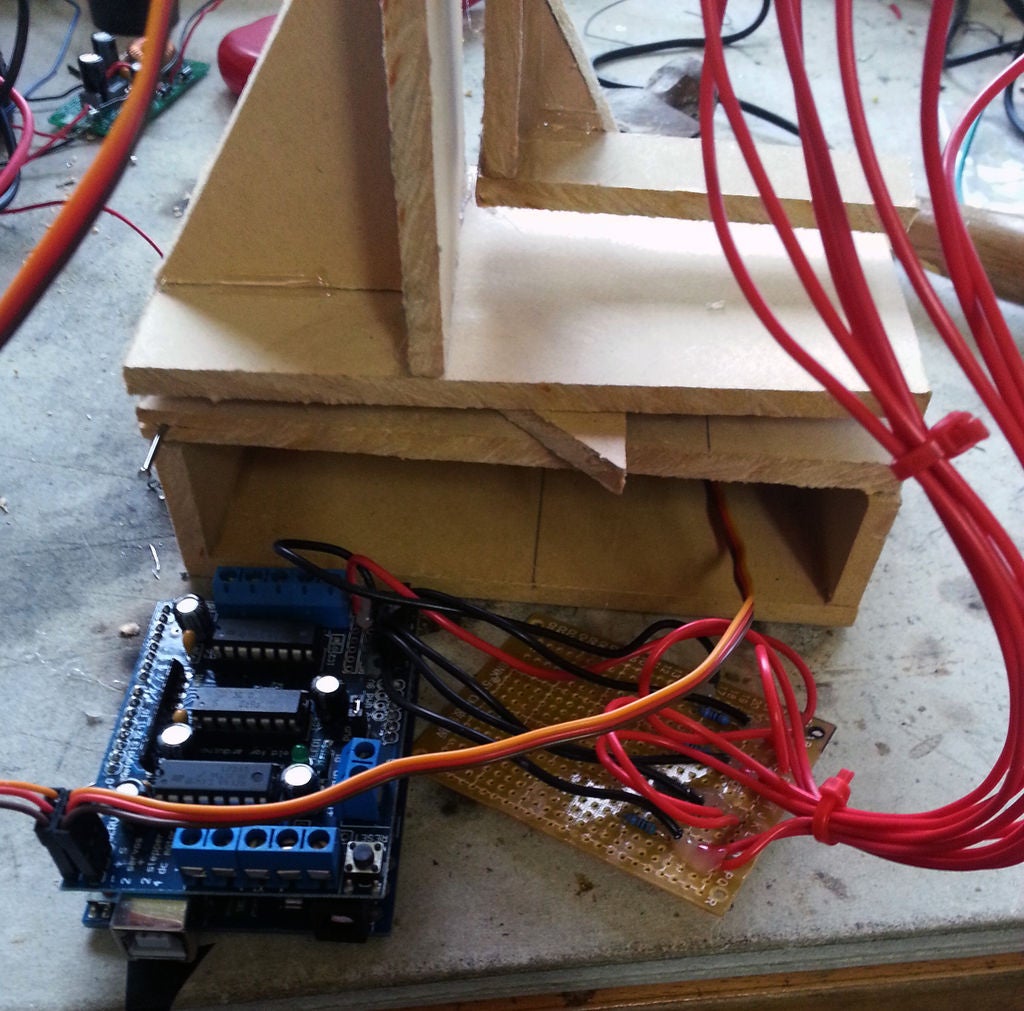


用于跟蹤系統非常簡單,因為大部分工作是由Arduino模塊和Adafruit電機護罩完成的。
方法
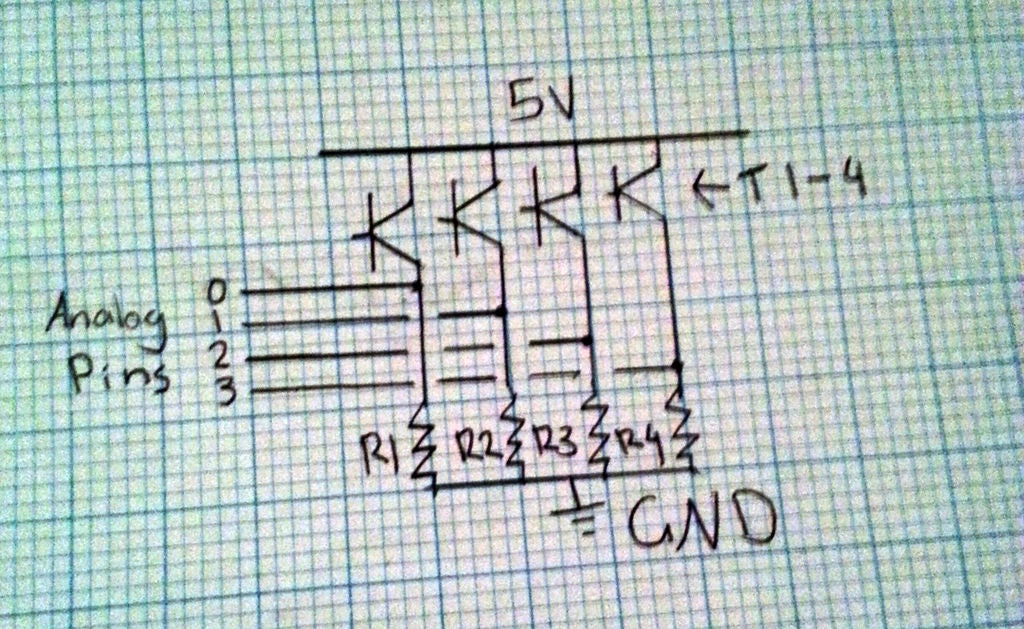
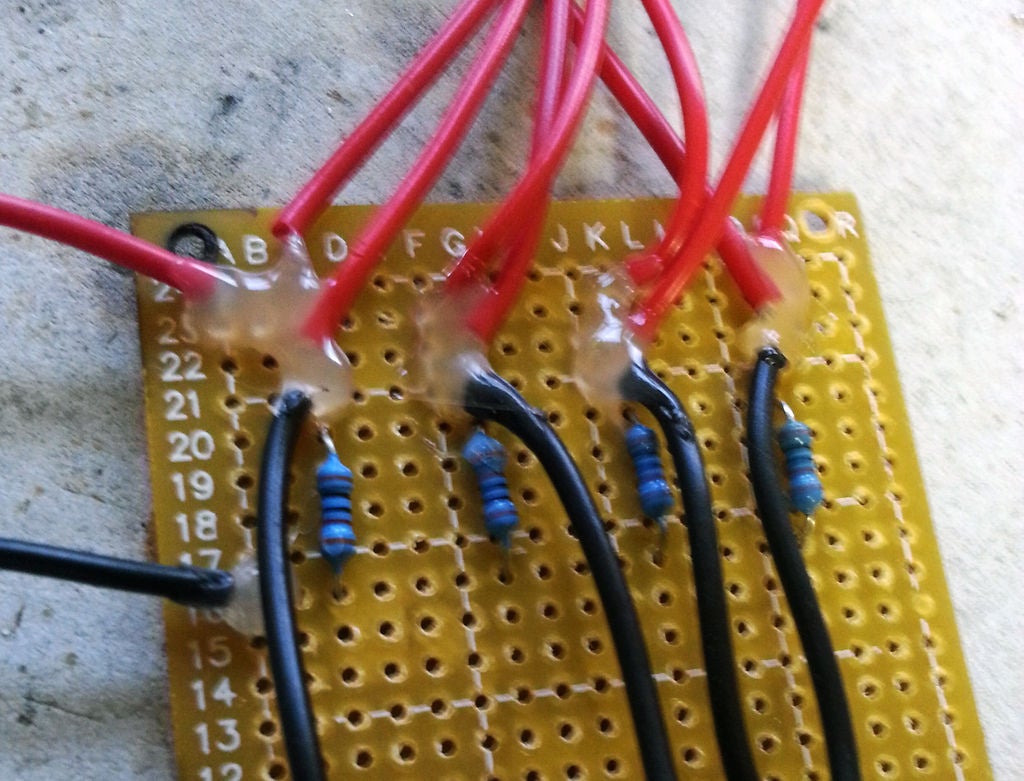
1。標記出K片上的光電晶體管(PT)的斑點。在上臂和下臂上,將(PT)粘到兩端20mm處,并粘到每側10mm處,在側面臂上,它們將粘到兩端10mm和15mm處。從側面看。結果2。將PT的引線彎曲成形狀。頂部和左側PT的引線將在邊緣上彎曲,底部和右側PT的引線將向外彎曲。結果3。將400mm導線之一焊接到每條PT引線4上。將每個PT膠粘到K上的適當位置。確保側臂上PT的導線都朝左,上臂和下臂上PT的導線都朝上5。接下來,將PCB焊接在一起(請參閱原理圖)。結果6。焊接R1-4(10k歐姆電阻器)將全部4的一端連接到一個公共節點(這將是GND)
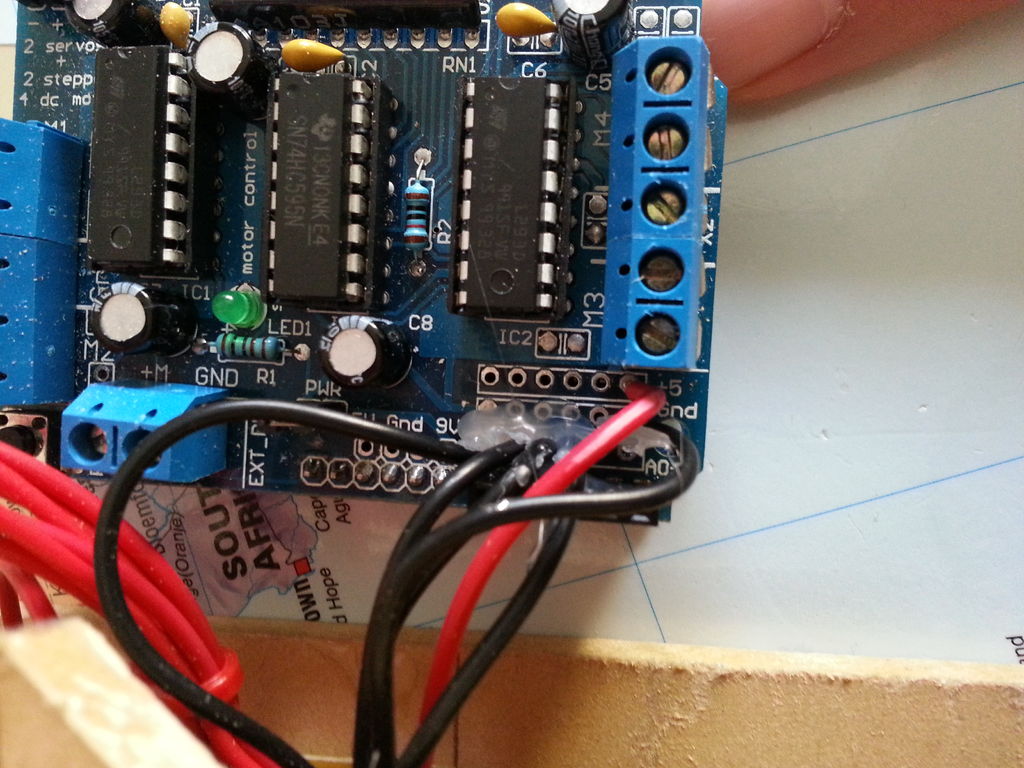
7。焊接PT T1-4。 PT的布局是; T1 =底部PT,T2 =頂部PT,T3 =右側PT,T4 =左側PT。焊接PT時,請確保將發射極側(短引線)連接到電阻器,將集電極(長引線)連接到所有其他PT的公共節點(這將是5v電源軌)。結果8。在所有PT的發射極引腳上焊接100mm的導線,該導線將連接到Adafruit電機的屏蔽層。結果9。在5v導軌(紅色)和GND(黑色)處焊接一條150mm的導線,該導線也將連接到Adafruit電機的屏蔽層。結果10。將100毫米電線(從PT上模擬讀取-電阻兩端的電壓將與光強度成比例)焊接到Adafruit電機屏蔽罩上的原型模擬引腳空間,并確保它們的順序正確(T1 = A0等)。結果11。將5v和GND導線焊接到Adafruit電機屏蔽層(這兩個都有一個原型導軌)。結果12。將所有電線熱粘到各自的PCB板上,以防止它們被扯出。
13。將伺服器連接到Adafruit電機屏蔽的伺服端子引腳,將伺服2接到引腳1,將伺服1接到引腳2。
14。電纜扎緊PT電線以防止安裝架移動時纏結,首先將電纜扎緊線對,然后將所有電線捆扎在一起。結果15。將所有電子設備放到底座中,并用熱膠固定。
跟蹤系統完成!
第4步:跟蹤系統代碼
該代碼才是真正的使設備工作。它從每個PT讀取100個值的數組,并確定是否存在200Hz脈沖信號。然后,它移動兩個伺服器以跟隨脈沖紅外光源。
有關信號檢測代碼的更多信息,請訪問我的其他Instructionable Arduino IR信號檢測器
下面提供了跟蹤代碼IR_flash_director。
IR_reader代碼僅打印出每個PT的原始值,我發現這些值在測試時很有用
第5步:紅外信號源
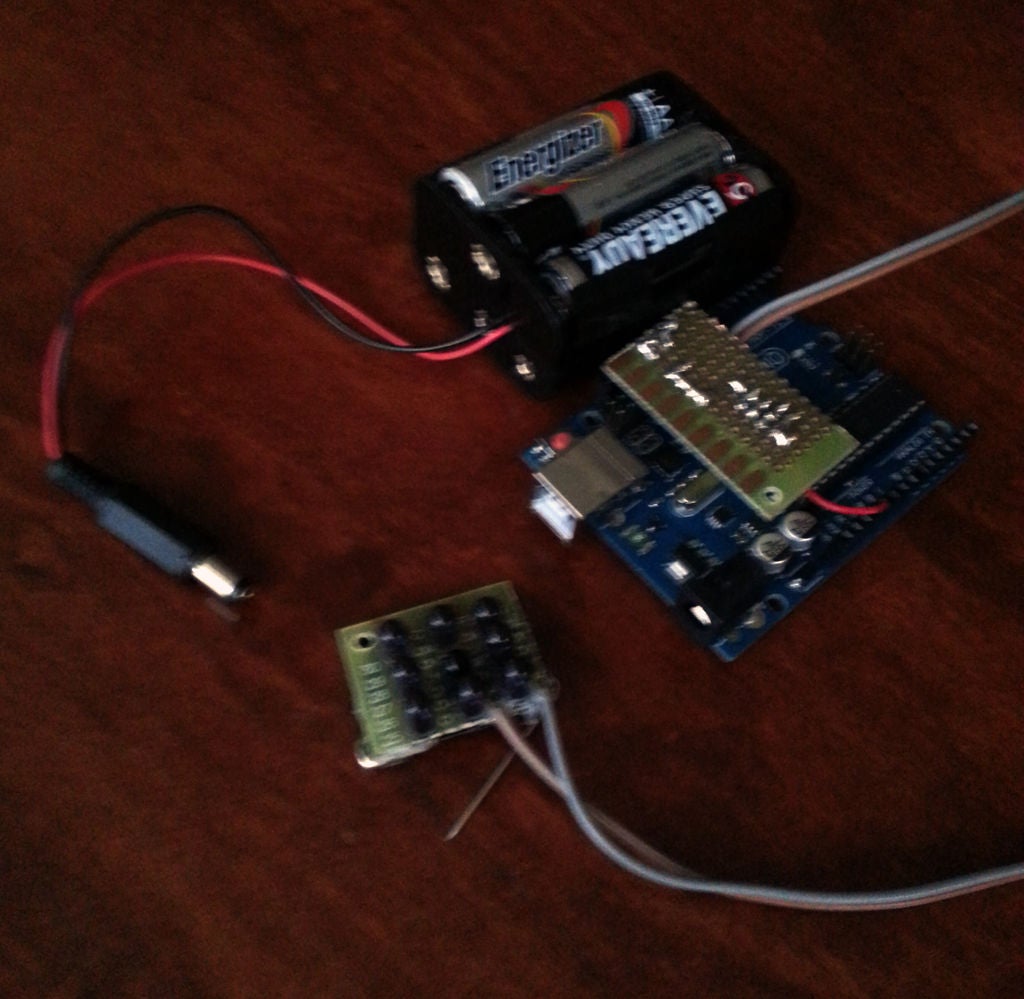









盡管您可以使用Arduino Uno使用此設備來產生200Hz的脈沖IR信號, 555計時器。
方法
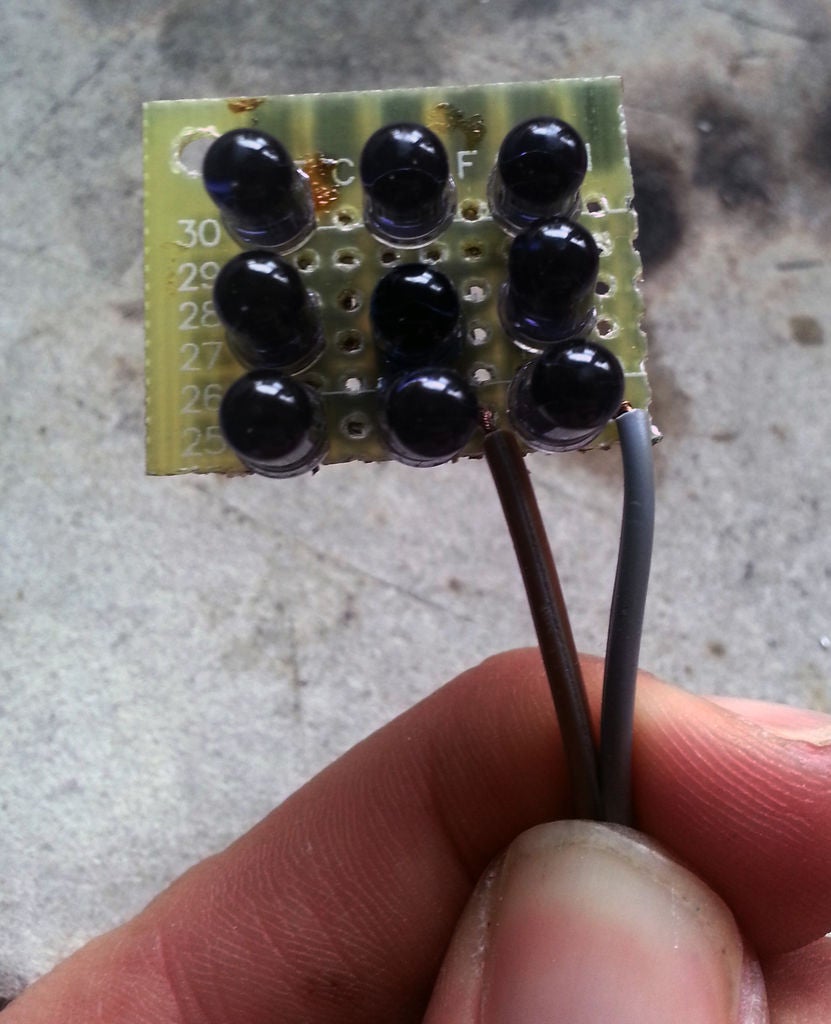
LED板
1。從較大的原型板(25x30mm)切出一塊小的PCB板。
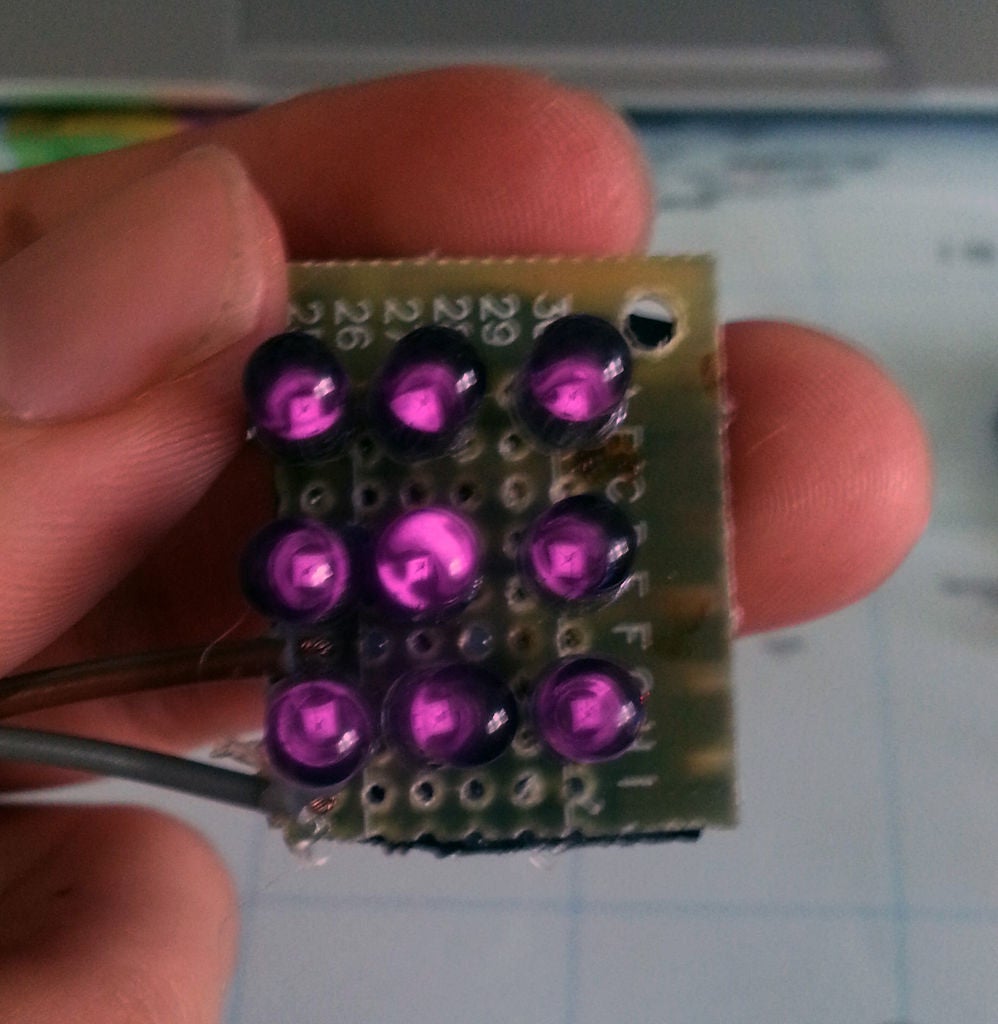
2。按照圖中所示的布局將9個LED陣列焊接到較小的PCB板上,并確保將兩個正極和兩個負極與連接線焊接在一起。結果3。將兩根750mm長的連接線焊接到LED板上,一根用于正極,一根用于負極(我使用了雙股AV線)。熱膠絲就位。結果4。將40mm長的熱縮管(按一定長度切割)熱粘到LED板的背面。這將阻止安全銷使LED短路。結果5。在您焊接750mm正極和負極電線的另一側,熱熔安全銷。安全銷是用于將LED固定到自己的安全銷。結果6。現在LED板已通過照相機完成測試,您應該看到LED發出紫色光。
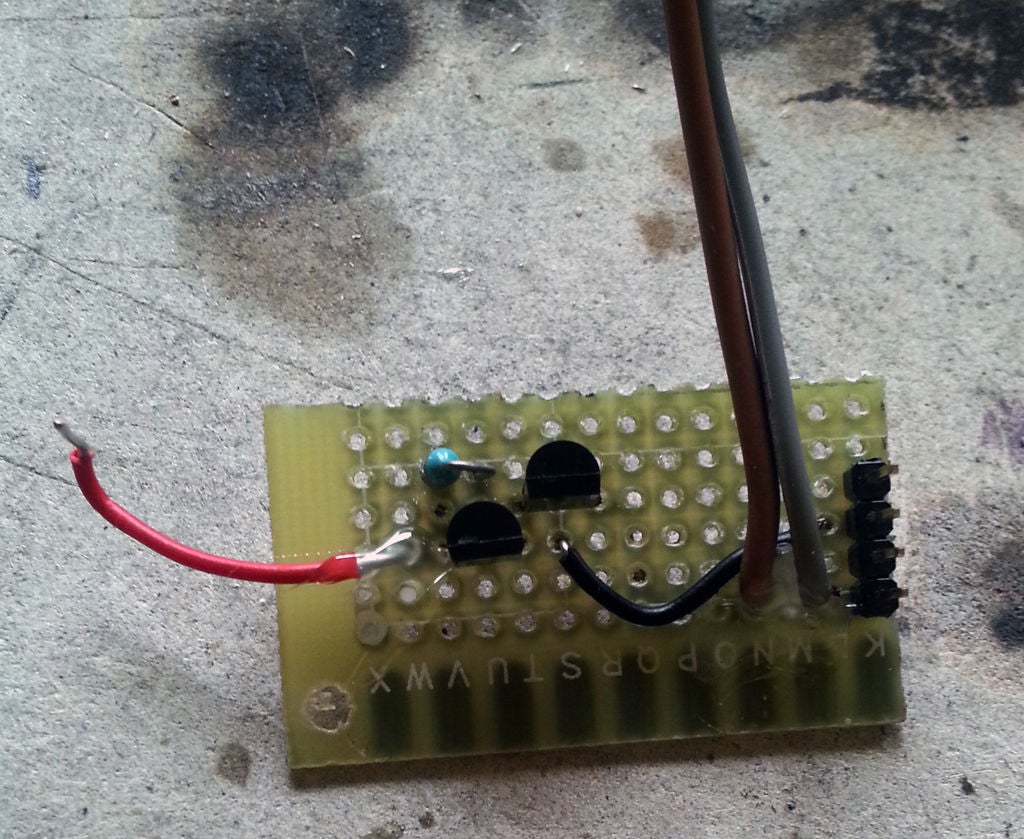
Mini Amp
此放大器是必需的,因為I/O引腳的輸出不足以為所有9個模塊供電LED的數量。
1。從較大的原型板(25mmx40mm)中切出一塊小的PCB板。
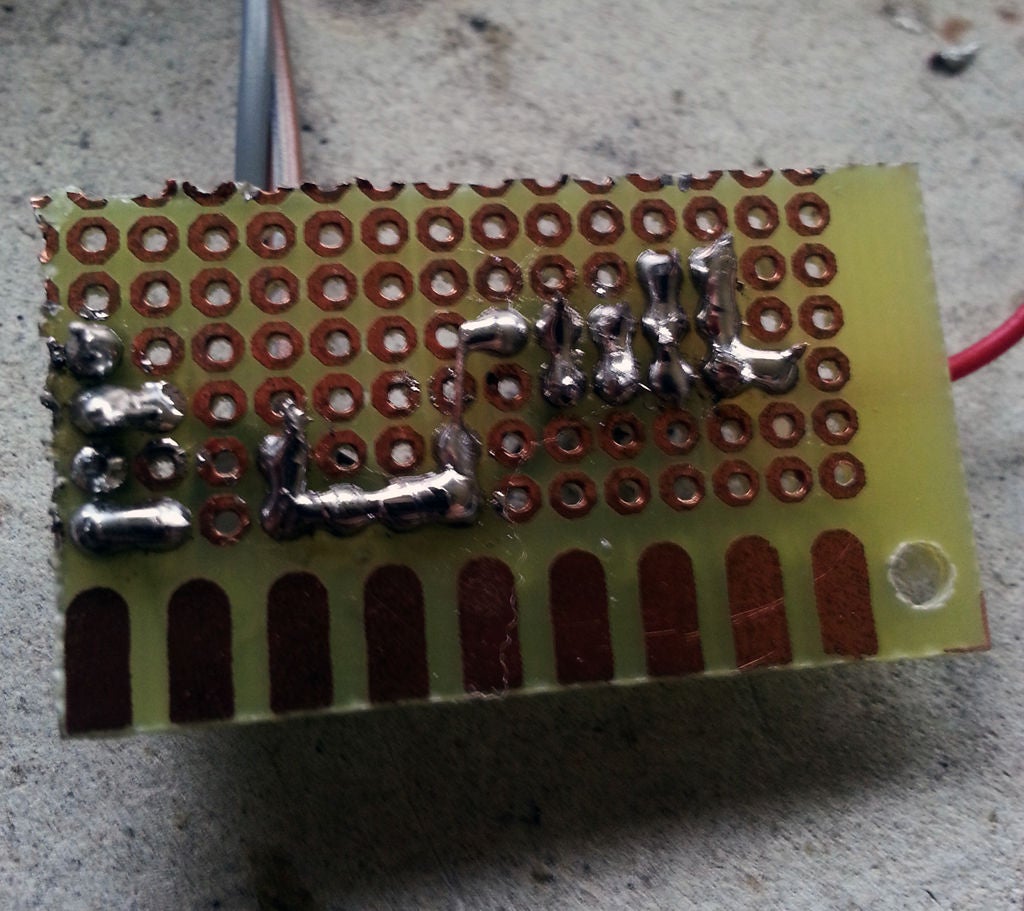
2。按照原理圖,從4引腳端子開始,將零件焊接到PCB上。此放大器板旨在直接連接到Arduino Uno,第一個引腳將連接到數字引腳側的GND。結果3。接下來,將兩個BC547晶體管焊接在一起,將T1的發射極焊接到T2的集電極。這些級聯的晶體管將大大放大脈沖信號。結果4。在T1
5的集電極和基極之間焊接400Ω電阻器。將正極線從LED板焊接到T2的發射極,將負極線焊接到GND端子引腳
6。使用鏈接將T2的基座連接到第3個端子引腳(第2個和第4個端子引腳僅在此處提供支撐)。結果7。焊接來自T1收集器的另一個鏈接,使其懸空,這將連接到Arduino的5v引腳。結果8。將電路板上下顛倒,然后將其連接至Arduino Uno,切記將GND引腳連接至Arduino的GND引腳,并將5v導線連接至Arduino的5v引腳。結果9。將2.5mm直流電源插座焊接到6x1.5 AA電池組上,這將為Arduino提供9v電源(比9v電池的使用壽命更長)。
信號源完成!
第6步:IR信號代碼

該代碼僅每5mS對引腳12施加250uS脈沖,產生200Hz信號,該代碼,“ flashing_ir”在下面可用。
一旦上傳到Arduino Uno上,您就可以使用“ Flash_det”代碼和跟蹤系統來測試是否正在生成信號,如果檢測到信號,Flash_det代碼將簡單地輸出負值。
第7步:最終測試

如視頻(視圖1和視圖2)所示,該設備有點慢又笨重,但這只是第一個原型,我對此感到非常滿意!它能夠檢測到大約3-4米遠的紅外信號,并忽略了設計中的其他光源(例如,我房間里的燈光)。
我將大部分笨拙/緩慢的運動歸結為小伺服系統必須在下一個設計中進行升級(特別是如果使用更大的攝像頭)。
此設備只是信號跟蹤系統的一個應用,該系統最初是為引導四軸飛行器而設計的(但從未實施)。登陸,盡管我看到了很多應用程序。
責任編輯:wv
-
信號源
+關注
關注
5文章
480瀏覽量
44551 -
支架
+關注
關注
0文章
22瀏覽量
10033
發布評論請先 登錄
相關推薦
用于透過印刷圖案或液體的高輸出紅外光源

為什么DAC5674在external 2×的情況下datarange在直流到200HZ之間?
ADS1298EVM板采集200Hz信號失真
AI智能識別監測攝像機

AI圖像識別攝像機
100Hz跟蹤難實現? 慧視定制RK3588輕松破局


LM3886輸入發送掃頻信號,掃頻信號到200Hz左右會出現震蕩,為什么?
車輛沖洗監測攝像機

防跌倒識別攝像機
客流量監測識別攝像機

基坑監測識別攝像機






 工商網監
工商網監
評論