 hs0038紅外接收電路
hs0038紅外接收電路
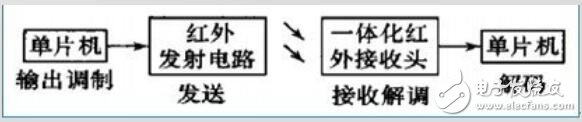
紅外遙控有發送和接收兩個組成部分。發送端采用單片機將待發送的二進制信號編碼調制為一系列的脈沖串信號,通過紅外發射管發射紅外信號。紅外接收完成對紅外信號的接收、放大、檢波、整形,并解調出遙控編碼脈沖。為了減少干擾, 采用的是價格便宜性能可靠的一體化紅外接收頭(HS0038, 它接收紅外信號頻率為38kHz,周期約26μ s) 接收紅外信號,它同時對信號進行放大、檢波、整形得到 TTL 電平的編碼信號,再送給單片機,經單片機解碼并執行去控制相關對象。具體實現過程如下:
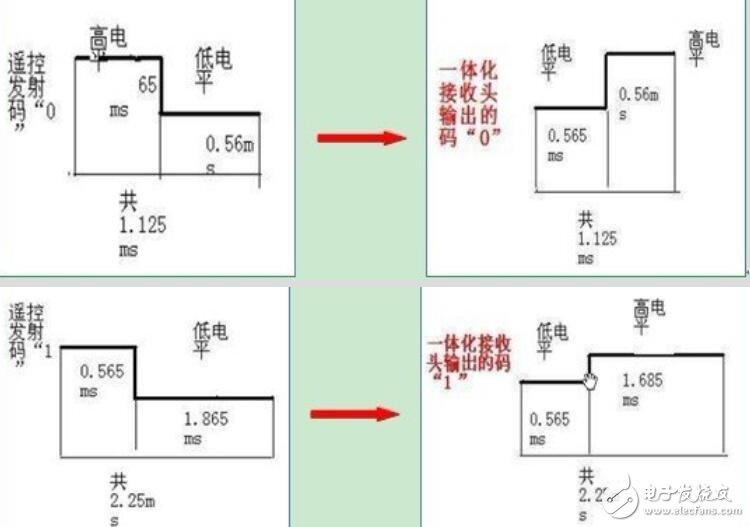
(在這里特別強調:編碼與解碼是一對逆過程,不僅在原理上是一對逆過程,在碼的發收過程也是互反的,即以前發射端原始信號是高電平,那接收頭輸出的就是低電平,反之亦然。因此為了保證解碼過程簡單方便,在編碼時應該直接換算成其反碼。)
1.紅外發射部分:
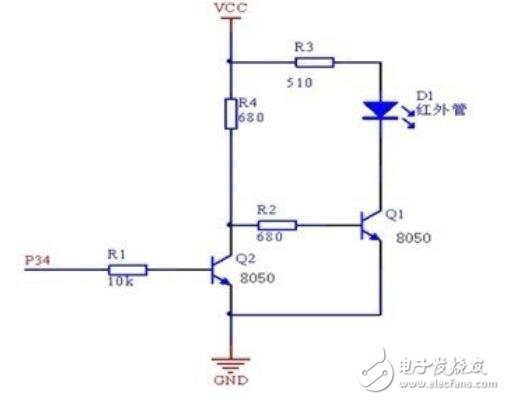
下圖為紅外發射部分的電路擬圖:
編碼過程:
(1) 二進制信號的調制
二進制信號的調制由單片機來完成,它把編碼后的二進制信號調制成頻率為38kHz的間斷脈沖串(用定時器來完成),相當于用二進制信號的編碼乘以頻率為38kHz的脈沖信號得到的間斷脈沖串,即是調制后用于紅外發射二極管發送的信號。
(2)PPM編碼
這種遙控編碼具有以下特征:
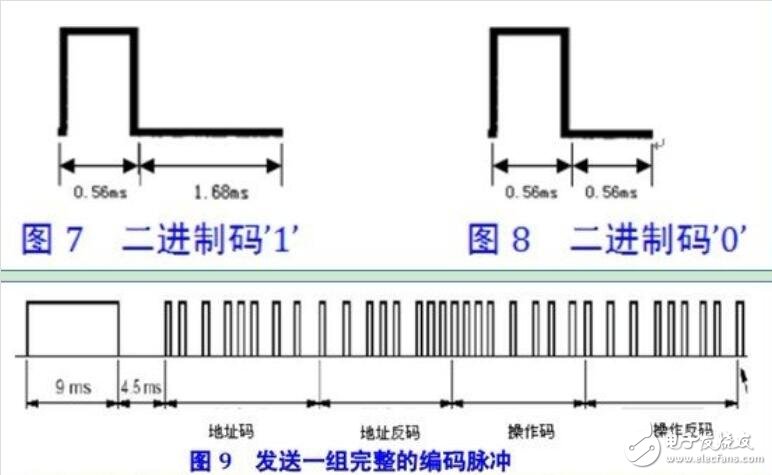
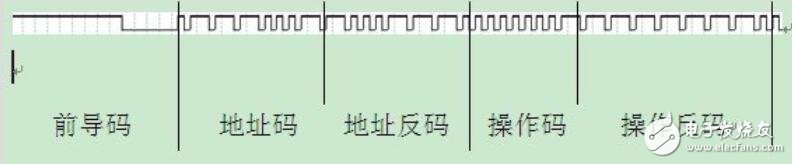
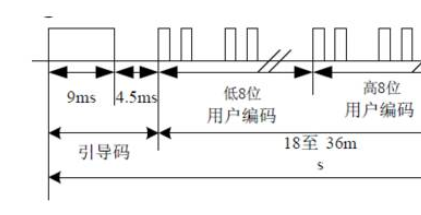
1遙控編碼脈沖由前導碼、16 位地址碼(8位地址碼、8 位地址碼的反碼)和 16 位操作碼(8 位操作碼、8 位操作碼的反碼)組成。前導碼:是一個遙控碼的起始部分,由一個9ms的高電平 ( 起始碼 ) 和一個4. 5ms的低電平 ( 結果碼 )組成,作為接受數據的準備脈沖。
16位地址碼:能區別不同的紅外遙控設備,防止不同機種遙控碼互相干擾。
16 位操作碼:用來執行不同的操作。
2采用脈寬調制的串行碼,以脈寬為0.56ms、間隔0.56ms、周期為1.12ms的組合表示二進制的“0”;以脈寬為1.68ms、間隔0.56ms、周期為2.24ms的組合表示二進制的“1”。
(3)發送程序
#include 《AT89X51.h》
static bit OP; //紅外發射管的亮滅控制位
static unsigned int count; //延時計數器
static unsigned int endcount; //終止延時計數
static unsigned char flag; //紅外發送標志
sbit P3_4=P3^4;
char iraddr1; //十六位地址的第一個字節
char iraddr2; //十六位地址的第二個字節
void SendIRdata(char p_irdata);//發送子函數
void delay();
void main(void)
{
count = 0;
flag = 0; //無載波
OP = 0; //不亮
P3_4 = 0; //在后面會發現用OP賦值的
EA = 1; //允許CPU中斷
TMOD = 0x11; //設定時器0和1為16位模式1
ET0 = 1; //定時器0中斷允許
TH0 = 0xFF;
TL0 = 0xE6; //設定時值0為38K 也就是每隔26us中斷一次
TR0 = 1;//開始計數
iraddr1=3;//自定義的一個地址
iraddr2=252;//地址反碼
do{
delay();
SendIRdata(12);
}while(1);
}
//定時器0中斷處理
void timeint(void) interrupt 1
{
TH0=0xFF;
TL0=0xE6; //設定時值為38K 也就是每隔26us中斷一次
count++;
if (flag==1)
{OP=~OP; }//如果是待發送的有效數據flag=1,就在此產生載波(亮滅交變)
else
{OP = 0; }
P3_4 = OP;
}
void SendIRdata(char p_irdata) //發送數據子函數
{
int i;
char irdata=p_irdata;
//發送9ms的起始碼,并是載波模式有效
endcount=223;
flag=1;
count=0;
while(count《endcount);//等待中斷,控制亮滅交變的總時間為9ms
//發送4.5ms的結果碼,并是載波模式無效
endcount=117
flag=0;
count=0;
do{}while(count《endcount);
//發送十六位地址的前八位
irdata=iraddr1;
for(i=0;i《8;i++)
{//一個周期里規定先以高電平開始,在以低電平結束。先發送0.56ms的38KHZ“1”的紅外波(即編碼中0.56ms的高電平)
endcount=10;
flag=1;
count=0;
do{}while(count《endcount);
//停止發送紅外信號(即編碼中的低電平)
if(irdata-(irdata/2)*2) //判斷二進制數個位為1還是0
{endcount=41; } //1為寬的高電平1.68ms
else
{endcount=15; } //0為窄的高電平0.56ms
flag=0;
count=0;
while(count《endcount);
irdata=irdata》》1;//依次取位
}
//發送十六位地址的后八位
irdata=iraddr2; //此處已經是地址的反碼
for(i=0;i《8;i++)
{
endcount=10;
flag=1;
count=0;
while(count《endcount);
if(irdata-(irdata/2)*2)
{endcount=41;}
else
{endcount=15;}
flag=0;
count=0;
do{}while(count《endcount);
irdata=irdata》》1;
}
//發送八位數據
irdata=p_irdata;
for(i=0;i《8;i++)
{
endcount=10;
flag=1;
count=0;
while(count《endcount);
if(irdata-(irdata/2)*2)
{ endcount=41; }
else
{endcount=15; }
flag=0;
count=0;
do{}while(count《endcount);
irdata=irdata》》1;
}
//發送八位數據的反碼
irdata=~p_irdata; //要將數據位取反
for(i=0;i《8;i++)
{
endcount=10;
flag=1;
count=0;
while(count《endcount);
if(irdata-(irdata/2)*2)
{endcount=41; }
else
{endcount=15; }
flag=0;
count=0;
while(count《endcount);
irdata=irdata》》1;
}
endcount=10;
flag=1;
count=0;
do{}while(count《endcount);
flag=0;
}
void delay()
{
int i,j;
for(i=0;i《400;i++)
{
for(j=0;j《100;j++)
{
}
}
}
一串完整的編碼如下圖所示
2.紅外接收部分:
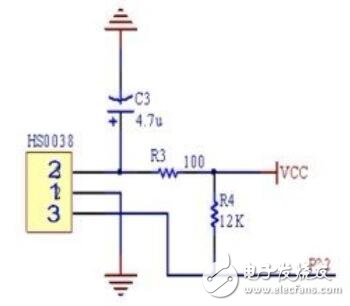
紅外接收完成對紅外信號的接收、放大、檢波、整形,并解調出遙控編碼脈沖。為了減少干擾,采用的是價格便宜性能可靠的一體化紅外接收頭(HS0038,它接收紅外信號頻率為38kHz,周期約26us) 接收紅外信號,它同時對信號進行放大、檢波、整形得到 TTL電平的編碼信號,再送給單片機,經單片機解碼并執行去控制相關對象。
接收部分的電路擬圖為:
其應用程序為:
#include“reg52.h”
#define uchar unsigned char
#define uint unsigned int
#include“reg52.h”
#define uchar unsigned char
#define uint unsigned int
uchar ram[4]={0,0,0,0};//存放接受到的4個數據 地址碼16位+按鍵碼8位+按鍵碼取反的8位
void delaytime(uint time) //延遲90uS
{ uchar a,b;
for(a=time;a》0;a--)
{ for(b=40;b》0;b--); }
}
void rem()interrupt 0 //中斷函數
{
uchar ramc=0; //定義接收了4個字節的變量
uchar count=0; //定義現在接收第幾位變量
uint i=0; //此處變量用來在下面配合連續監測9MS 內是否有高電平
prem=1;
for(i=0;i《1100;i++) //以下FOR語句執行時間為8MS左右
{
if(prem) //進入遙控接收程序首先進入引導碼的前半部判斷,即:是否有9MS左右的低電平
return; //引導碼錯誤則退出 ,注意與break語句的區別
}
while(prem!=1); //等待引導碼的后半部 4.5 MS 高電平開始的到來。
delaytime(50); //延時大于4.5MS時間,跨過引導碼的后半部分,來到真正遙控數據32位中
//第一位數據的0.56MS開始脈沖
for(ramc=0;ramc《4;ramc++)//循環4次接收4個字節
{ for(count=0;count《8;count++) //循環8次接收8位(一個字節)
{
while(prem!=1); //開始判斷現在接收到的數據是0或者1 ,首先在這行本句話時,
//保已經進入數據的0.56MS 低電平階段
//等待本次接受數據的高電平的到來。
delaytime(9);//高電平到來后,數據0 高電平最多延續0.56MS,而數據1,高電平可延續1.66MS大于0.8MS 后我們可以再判斷遙控接收腳的電平。
if(prem) //如果這時高電平仍然在繼續那么接收到的數據是1的編碼
{ram[ramc]=(ram[ramc]《《1)+1;//將目前接收到的數據位1放到對應的字節中
delaytime(11); //如果本次接受到的數據是1,那么要繼續延遲1MS,這樣才能跨
//下個位編碼的低電平中(即是開始的0.56MS中)
}
else //否則目前接收到的是數據0的編碼
ram[ramc]=ram[ramc]《《1; //將目前接收到的數據位0放到對應的字節中
} //本次接收結束,進行下次位接收,此接收動作進行32次,正好完成4個字節的接收
}
if(ram[2]!=(~(ram[3]&0x7f))) //本次接收碼的判斷
{ for(i=0;i《4;i++) //沒有此對應關系則表明接收失敗,清除接受到的數據
ram[i]=0;
returned;}
main()
{
IT0=1; //設定INT0為邊沿觸發
EX0=1; //打開外部中斷0
EA=1; //全局中斷開關打開
while(1)
{
switch(dis_num)
{
case 0x81: num=0; break;
case 0xcf: num=1; break;
case 0x92: num=2; break;
case 0x86: num=3; break;
case 0xcc: num=4; break;
case 0xa4: num=5; break;
case 0xa0: num=6; break;
case 0x8f: num=7; break;
case 0x80: num=8; break;
case 0x84: num=9; break;
case 0x88: num=10;break;
case 0xe0: num=11;break;
case 0xb1: num=12;break;
case 0xc2: num=13;break;
case 0xb0: num=14;break;
case 0xb8: num=15;break;
}
P2=table[num];
P1=0x01;
delaytime(5);
}
-
調制
+關注
關注
0文章
158瀏覽量
29686 -
紅外遙控
+關注
關注
22文章
347瀏覽量
45639 -
HS0038
+關注
關注
1文章
5瀏覽量
13398
發布評論請先 登錄
相關推薦
紅外接收設計問題
紅外遙控接收器HS0038是如何與紅外遙控器相匹配的?紅外接收器的工作原理是怎么樣的?
單片機的紅外線發射和接收配置端口的問題
基于STC89C52芯片和HS0038紅外接收探頭的紅外通信系統該如何去設計?
迅為i.MX6Q開發板-紅外 hs0038 測試





 工商網監
工商網監
評論