線控轉(zhuǎn)向系統(tǒng) - 主動前輪轉(zhuǎn)向控制技術(shù)研究
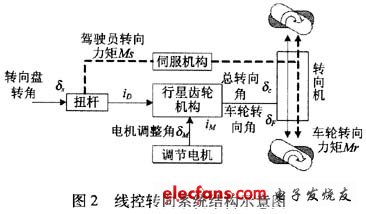
一般來說,線控轉(zhuǎn)向系統(tǒng)由方向盤總成、轉(zhuǎn)向執(zhí)行總成和主控制器(ECU)3個(gè)主要部分以及自動防故障系統(tǒng)、電源等輔助系統(tǒng)組成,系統(tǒng)結(jié)構(gòu)如圖2所示。
?
方向盤總成包括方向盤、方向盤轉(zhuǎn)角傳感器、力矩傳感器、方向盤回正力矩電機(jī)。其主要功能是將駕駛員的轉(zhuǎn)向意圖(通過測量方向盤轉(zhuǎn)角)轉(zhuǎn)換成數(shù)字信號,并傳遞給主控制器;同時(shí)接受主控制器送來的力矩信號,產(chǎn)生方向盤回正力矩,以提供給駕駛員相應(yīng)的路感信息。
轉(zhuǎn)向執(zhí)行總成包括前輪轉(zhuǎn)角傳感器、轉(zhuǎn)向執(zhí)行電機(jī)、轉(zhuǎn)向電機(jī)控制器和前輪轉(zhuǎn)向組件等。轉(zhuǎn)向執(zhí)行總成的功能是接受主控制器的命令,通過轉(zhuǎn)向電機(jī)控制器控制轉(zhuǎn)向車輪轉(zhuǎn)動,實(shí)現(xiàn)駕駛員的轉(zhuǎn)向意圖。
主控制器對采集的信號進(jìn)行分析處理,判別汽車的運(yùn)動狀態(tài),給方向盤回正力電機(jī)和轉(zhuǎn)向電機(jī)發(fā)送指令,控制兩個(gè)電機(jī)的工作,保證各種工況下都具有理想的車輛響應(yīng),以減少駕駛員對汽車轉(zhuǎn)向特性隨車速變化的補(bǔ)償任務(wù),減輕駕駛員負(fù)擔(dān)。同時(shí)控制器還可以對駕駛員的操作進(jìn)行判別。
由于線控轉(zhuǎn)向系統(tǒng)結(jié)構(gòu)的特殊性,因而自動防故障系統(tǒng)成為線控轉(zhuǎn)向系統(tǒng)的重要模塊,它包括一系列的監(jiān)控和實(shí)施算法,針對不同的故障形式和故障等級做出相應(yīng)的處理,以求最大限度地保持汽車的正常行駛。
2 主動前輪轉(zhuǎn)向動力學(xué)控制
2.1 橫擺角速度的控制
在一般的駕駛操作中,駕駛員要同時(shí)完成兩個(gè)任務(wù):(1)路徑跟隨;(2)車輛姿態(tài)的保持。路徑跟隨由于涉及到路線的選擇和跟隨等復(fù)雜問題,目前還無法由控制器完全取代駕駛員。相反,因?yàn)橥饨鐢_動對車輛姿態(tài)的影響常常很突然,車輛姿態(tài)的控制對駕駛員而言,特別是對新手來說,就比較困難。而這樣的控制由控制器卻完全可以實(shí)現(xiàn)。由于涉及到車輛的姿態(tài)控制的動力學(xué)參數(shù)主要是橫擺角速度,因而對橫擺角速度的控制也成為主動前輪轉(zhuǎn)向控制最重要的方面。
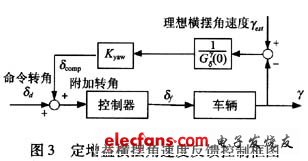
對橫擺角速度的控制,常見的方法有3種:(1)橫擺角速度反饋控制;(2)魯棒單向解耦橫擺角速度控制;(3)基于擾動觀察器的橫擺角速度控制。橫擺角速度反饋控制的基本思路是利用理想橫擺角速度Yest和實(shí)際橫擺角速度Y之差進(jìn)行反饋控制。寶馬的主動轉(zhuǎn)向系統(tǒng)運(yùn)用的是橫擺角速度反饋控制的方法,其控制器為PI控制。橫擺角速度反饋控制不但使橫擺角速度響應(yīng)的帶寬增大,而且使橫擺角速度阻尼增大,尤其是在車速較高時(shí)改善了車輛的操縱穩(wěn)定性。但也同時(shí)存在著降低橫擺角速度和側(cè)向加速度的增益,進(jìn)而使駕駛員中低速時(shí)操縱困難。針對上述問題,一般采用定增益形式的橫擺角速度反饋控制進(jìn)行改進(jìn),該控制方法可保持車輛橫擺角速度增益在反饋控制時(shí)不變。圖3所示為一定 增益橫擺角速度反饋控制框圖。其中,為車輛在等速圓周運(yùn)動情況下從前輪轉(zhuǎn)角到橫擺角速度的增益,Kyaw為反饋比例系數(shù)。
?
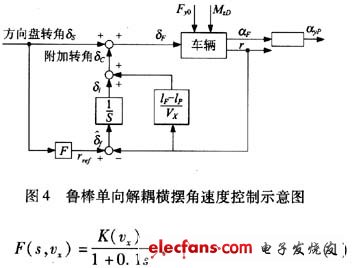
魯棒單向解耦橫擺角速度控制是由德國宇航局的阿克曼教授提出的,在合理分解駕駛員操作任務(wù)的基礎(chǔ)上,對橫擺角速度和側(cè)向加速度單向解耦,進(jìn)而對橫擺角速度進(jìn)行控制。所謂單向解耦,指的是控制器在對車輛的橫擺角速度進(jìn)行反饋控制時(shí)對車輛前橋解耦點(diǎn)的側(cè)向加速度沒有影響,而在駕駛員進(jìn)行側(cè)向運(yùn)動控制時(shí),可以通過側(cè)向加速度間接影響橫擺角速度,保證車輛能順利過彎,這是該算法的最大特點(diǎn)。由于該算法本身對車輛不確定參數(shù)(如:車輛質(zhì)量分布、車速、輪胎與地面間的附著系數(shù))具有一定的魯棒性,故而稱為魯棒單向解耦控制。魯棒單向解耦控制也存在橫擺角速度阻尼隨車速的增加而下降的問題,可采用預(yù)設(shè)橫擺角速度阻尼的控制方法加以解決。該方法是在單向解耦控制和橫擺角速度阻尼之間進(jìn)行折衷,實(shí)現(xiàn)既能在不同車速下保持較好的橫擺角速度阻尼特性,又能維持車輛控制對名義模型的橫擺角速度單向解耦。圖4所示為魯棒單向解耦橫擺角速度控制框圖。圖中在實(shí)際控制時(shí)采用的是一個(gè)衰退的積分,從而使橫擺角速度的控制只在擾動發(fā)生1 s內(nèi)產(chǎn)生作用,幫助駕駛員穩(wěn)定車輛,1 s以后,車輛將完全在駕駛員的控制之下。參考橫擺角速度值由式(1)算出,是一個(gè)與速度有關(guān)的穩(wěn)態(tài)值。
?
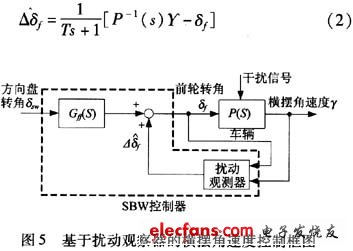
近年來,隨著控制技術(shù)的發(fā)展,一種以往多用于電機(jī)控制的擾動觀察器控制方法被移植到了車輛橫擺角速度控制中。該控制方法的基本原理如圖5所示,利用擾動觀察器理論建立的反饋補(bǔ)償器,通過反饋補(bǔ)償器根據(jù)車輛包含擾動的實(shí)際橫擺角速度生成一個(gè)補(bǔ)償轉(zhuǎn)角,疊加到車輛的輸入轉(zhuǎn)角上,從而實(shí)現(xiàn)對車輛橫擺角速度的控制。反饋補(bǔ)償器的表達(dá)式如下:
?
從表達(dá)式中可以看出,所謂的擾動觀察器其實(shí)質(zhì)是利用車輛的反向動力學(xué)傳遞模型,通過車輛的實(shí)際橫擺角速度來計(jì)算車輛的名義前輪轉(zhuǎn)角,進(jìn)而通過與實(shí)際前輪轉(zhuǎn)角求差來得到抵消橫擺擾動的轉(zhuǎn)角來進(jìn)行控制。由于控制過程中橫擺角速度信號會遇到噪聲信號,故一般擾動觀察器都帶有一個(gè)低通濾波環(huán)節(jié)。低通濾波環(huán)節(jié)同時(shí)還有改變反向動力學(xué)模型分子分母階次的作用,使其在控制上可以實(shí)現(xiàn)。基于擾動觀察器的橫擺角速度控制具有結(jié)構(gòu)簡單,含義清晰,對外界擾動和系統(tǒng)參數(shù)變化具有較強(qiáng)的魯棒性特點(diǎn)。理論和實(shí)驗(yàn)證明擾動觀察器的控制結(jié)構(gòu)更適合進(jìn)行橫擺穩(wěn)定性控制,成為未來橫擺角速度控制發(fā)展的一個(gè)方向。
- 第 1 頁:主動前輪轉(zhuǎn)向控制技術(shù)研究
- 第 2 頁:線控轉(zhuǎn)向系統(tǒng)
- 第 3 頁:橫擺角速度和側(cè)向加速度的綜合控制
本文導(dǎo)航
非常好我支持^.^
(16) 100%
不好我反對
(0) 0%
相關(guān)閱讀:
- [電子說] XC9290/XC9291系列降壓DC/DC轉(zhuǎn)換器簡介 2023-10-19
- [機(jī)器人] 深度解析機(jī)器人控制技術(shù)背后的機(jī)械原理 2023-10-17
- [電子說] 控制技術(shù)是推動現(xiàn)代電機(jī)發(fā)展的重要?jiǎng)恿?——畢超博士出席浙江電機(jī)協(xié)會第9次 2023-10-10
- [電子說] OLED透明屏控制:引領(lǐng)未來交互技術(shù)的創(chuàng)新突破 2023-10-07
- [電子說] 變頻空調(diào)和定頻空調(diào)的區(qū)別 2023-09-15
- [電子說] 電氣控制技術(shù)及低壓電器元件概述 2023-09-08
- [電子說] 新一代電機(jī)控制技術(shù)的研發(fā) 2022-10-05
- [電子說] 信號隔離器智能化發(fā)明專利:一種模擬信號隔離傳輸及智能控制技術(shù) 2022-09-01
( 發(fā)表人:葉子 )