

















因為PI系統中的I的存在會使整個控制系統的響應速度受到影響,為了解決這個問題,我們在控制中增加了D微分項,微分項主要用來解決系統的響應速度問題,其完整的公式如下:
u(t) = Kp*e(t) + Ki∑e(t) + Kd[e(t) – e(t-1)]+u0
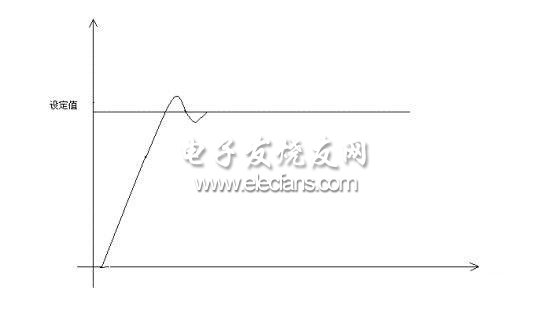
在模擬電路中的微分常數是與特征頻率相關系的,而在數字離散PID中的微分項實際上是有一些問題的,因為其只計算了兩次誤差的差值,而實際的模擬PID或者用戶需要的理想微分公式應該是要對其進行展寬的,只有展寬的D值才能真正的起到很好的效果。微分項在控制系統中起到減少超調降低振蕩的作用,但因為微分項本身對于干擾很敏感,所以在使用微分項時要慎重。
在PID的調試過程中,我們應注意以下步驟:
1、 關閉I和D,加大P,使其產生振蕩;
2、 減小P,找到臨界振蕩點;
3、 加大I,使其達到目標值;
4、 重新上電看超調、振蕩和穩定時間是否吻合要求;
5、 針對超調和振蕩的情況適當的增加一些微分項;
6、 注意所有調試均應在最大爭載的情況下調試,這樣才能保證調試完的結果可以在全工作范圍內均有效;
位置PID與增量PID:
前面我們所說的PID公式均是位置PID,也稱為全量PID,這在溫控、閥門控制、水泵控制中最常用到,另一種PID公式稱之為增量PID其公式如下:
△u(t) = u(t) – u(t-1)
這在運動控制中最常使用,其輸出是兩次PID運算結果的差值,一般的步進或者伺服電機的位置控制可以采用這種方式。
二十一、運動控制
運動控制是近些年的熱門,精密定位、恒速控制、恒力矩控制等在各種裝備中的應用越來越廣泛,這對于控制器的要求也越來越高。
對于運動控制,大家比較常用的包括步進電機、伺服電機,除此之外伺服閥、數字液壓等都屬于同一類的控制方式。在這些運控系統中,我們又根據控制對象的不同分為位置控制、速度控制、力矩控制三大類。其中步進電機只能應用于位置控制,而伺服則可以應用于這三類中的任一種控制方式。
在運動控制系統中我們一般可以使用專用的運動控制器或者PLC來實現運動控制功能,一般來說專用的運動控制器如數控系統等會更為專業功能更強,對于插補、G指令的支持會更好。
比方說高檔的數控系統可能會支持以下的功能:用戶用CAD畫完圖后轉換成G代碼下載給控制器,控制器就可以執行對應的G代碼完成整個控制過程。
而PLC相對而言是一個更為通用的控制平臺,一般通過功能塊來實現運動控制功能,V80增強系列(/S)對于兩軸的位置控制有很強的支撐,可以滿足絕大多數運動控制要求的環境,V80的速度控制和力矩控制一般使用E6MAD擴展模塊來實現,在這里我們提到的運動控制是CPU模塊本身的位置控制功能。
21.1、位置控制基礎
在裝備控制中有相當多的場合需要用到位置定位控制,如各種機床、收卷排線、紙張電纜管材的定長裁剪、包裝、印刷等。位置控制的實現,通常是通過步進電機和伺服電機來達到的,下面我們統一以步進電機來描述。
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。這一線性關系的存在,加上步進電機只有周期性的誤差而無累積誤差等特點。使得在速度、位置等控制領域用步進電機來控制變的非常的簡單。
PLC正是利用步進電機的這種特性來實現位置控制功能的,PLC與步進電機之間的接口為脈沖接口,我們稱之為PTO。
脈沖與位置的關系:
比方說我們需要步進電機轉動90度,而步進電機的步距角為0.3度的,那么我們的脈沖輸出個數就應該為300個,當300個脈沖輸出完畢后電機正好旋轉90度停止。









 工商網監
工商網監
用戶評論
共 0 條評論