

















比例值太小時的控制效果圖:
如果比例值太小,反饋值始終到不了設定值(靜態誤差)就達到了平衡(如果是加熱的話就是說散熱與P*e(t)加熱達到了一個平衡)
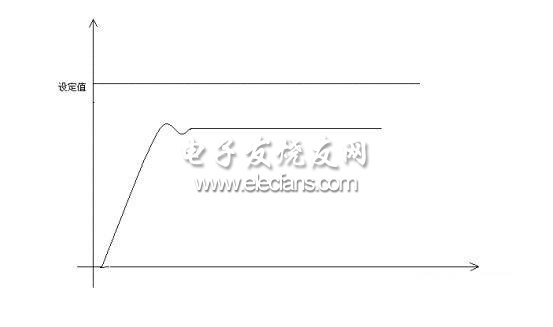
比例值太大時的控制效果圖:

如果比例值太大,則被控對象會出上圖所示的振蕩,當然振蕩點不一定是在設定值,而會根據被控對象的不同或者P值的大小而在某個位置進行振蕩。這對于大多數的控制對旬來說是不允許的。
比例積分控制(PI):
積分的存在是針對比例控制要不就是有差值要不就是振蕩的這種特點提出的改進,它常與比例一塊進行控制,也就是PI控制。
其公式有很多種,但大多差別不大,標準公式如下:
u(t) = Kp*e(t) + Ki∑e(t) +u0
u(t)——輸出
Kp——比例放大系數
Ki——積分放大系數
e(t)——誤差
u0——控制量基準值(基礎偏差)
大家可以看到積分項是一個歷史誤差的累積值,如果光用比例控制時,我們知道要不就是達不到設定值要不就是振蕩,在使用了積分項后就可以解決達不到設定值的靜態誤差問題,比方說一個控制中使用了PI控制后,如果存在靜態誤差,輸出始終達不到設定值,這時積分項的誤差累積值會越來越大,這個累積值乘上Ki后會在輸出的比重中越占越多,使輸出u(t)越來越大,最終達到消除靜態誤差的目的。
PI兩個結合使用的情況下,我們的調整方式如下:
1、先將I值設為0,將P值放至比較大,當出現穩定振蕩時,我們再減小P值直到P值不振蕩或者振蕩很小為止(術語叫臨界振蕩狀態),在有些情況下,我們還可以在些P值的基礎上再加大一點。
2、加大I值,直到輸出達到設定值為止。
3、等系統冷卻后,再重上電,看看系統的超調是否過大,加熱速度是否太慢。
通過上面的這個調試過程,我們可以看到P值主要可以用來調整系統的響應速度,但太大會增大超調量和穩定時間;而I值主要用來減小靜態誤差。
標準的PID公式在溫控等響應較慢的系統中會存在積分項導致過沖的情況,這是因為在開始加熱后,盡管這時輸出已調整最大(比方說固態繼電器的PWM輸出已是100%開了)但這時的溫度仍然只能緩慢上升,這時的積分項會增加得很快,當溫度達到設定值后,這時盡管比例項已輸出為0,但是積分項仍然會因為其累積值很高而有較大的輸出,導致溫度超調。
在德維森的V80中,通過改進的遇限消弱積分法等措施很好的解決了這個問題,使積分項在輸出全開時停止積分,減少了積分對于這種大時延系統的影響。









 工商網監
工商網監





用戶評論
共 0 條評論