本文為在FPGA中支持DSR協(xié)議的路由表項(xiàng)管理功能,設(shè)計(jì)一種基于有限狀態(tài)機(jī)[8]的實(shí)現(xiàn)方法。
2020-12-22 16:27:25 1921
1921 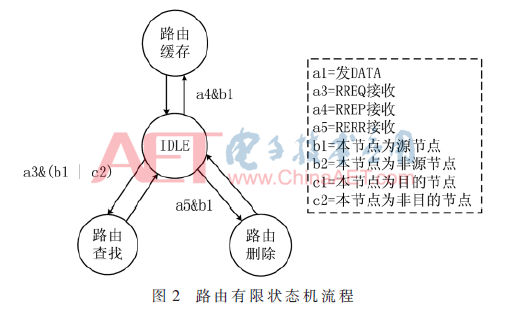
狀態(tài)機(jī)建模是使用狀態(tài)圖和方程式的手段,創(chuàng)建基于混合信號(hào)的有限狀態(tài)機(jī)模型的一種建模工具。
2023-12-05 09:51:02431 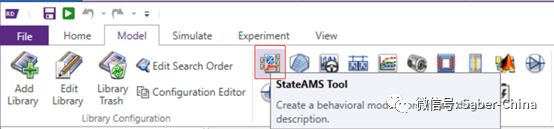
系統(tǒng)分成控制模塊和執(zhí)行模塊。控制模塊是一個(gè)遙控器,安芯一號(hào)作為主控芯片。按鍵來控制飛行器的運(yùn)動(dòng),包括懸空,上升,下降,水平4個(gè)方向的運(yùn)動(dòng)。單片機(jī)直接與無線串口模塊進(jìn)行通信,把指令直接通過串口拋數(shù)據(jù)給
2013-11-03 23:25:05
的系統(tǒng),根據(jù)狀態(tài)機(jī)的原理對(duì)其動(dòng)作的操作和確認(rèn)的過程進(jìn)行分析,并用狀態(tài)圖表示出來,然后根據(jù)狀態(tài)圖編寫出按鍵接口程序。
2019-10-21 08:33:04
在實(shí)際的應(yīng)用中,根據(jù)有限狀態(tài)機(jī)是否使用輸入信號(hào),設(shè)計(jì)人員經(jīng)常將其分為Moore型有限狀態(tài)機(jī)和Mealy型有限狀態(tài)機(jī)兩種類型。
2020-04-06 09:00:21
軟件開發(fā)第四講 - 按鍵檢測(cè)(狀態(tài)機(jī))一、工具鏈接1、Keil c51 UV4https://yunpan.360.cn/surl_yrIfYYmeRFk2、STC-ISP下載軟件https
2022-02-18 06:51:28
,有限狀態(tài)機(jī)(FSM)是實(shí)時(shí)系統(tǒng)設(shè)計(jì)中的一種數(shù)學(xué)模型,是一種重要的、易于建立的、應(yīng)用比較廣泛的、以描述控制特性為主的建模方法,它可以應(yīng)用于從系統(tǒng)分析到設(shè)計(jì)(包括硬件、軟件)的所有階段。很多實(shí)時(shí)系統(tǒng),特別是
2008-07-10 18:00:24
關(guān)于有限狀態(tài)機(jī)的總結(jié)資料,比較全面,特別分享下。
2016-04-16 13:22:10
數(shù)字系統(tǒng)有兩大類有限狀態(tài)機(jī)(Finite State Machine,F(xiàn)SM):Moore狀態(tài)機(jī)和Mealy狀態(tài)機(jī)。Moore狀態(tài)機(jī) 其最大特點(diǎn)是輸出只由當(dāng)前狀態(tài)確定,與輸入無關(guān)。Moore狀態(tài)機(jī)
2012-03-09 10:04:18
FPGA有限狀態(tài)機(jī)
2013-09-08 08:45:17
本文檔旨在提供有關(guān) ST 的 ISM330DHCX嵌入式有限狀態(tài)機(jī)的使用和配置的信息。ISM330DHCX 可配置為由用戶定義的運(yùn)動(dòng)模式激活中斷信號(hào)生成。為此,最多可以為運(yùn)動(dòng)檢測(cè)獨(dú)立編程 16 組嵌入式有限狀態(tài)機(jī)。
2023-09-08 08:00:23
本文檔旨在提供有關(guān) ST 的 LSM6DSOX 嵌入式有限狀態(tài)機(jī)的使用和配置的信息。LSM6DSOX 可配置為由用戶定義的運(yùn)動(dòng)模式激活中斷信號(hào)生成。為此,最多可以為運(yùn)動(dòng)檢測(cè)獨(dú)立編程 16 組嵌入式有限狀態(tài)機(jī)
2023-09-06 06:36:09
本文檔旨在提供有關(guān) ST 的 LSM6DSOX 嵌入式有限狀態(tài)機(jī)的使用和配置的信息。LSM6DSOX 可配置為由用戶定義的運(yùn)動(dòng)模式激活中斷信號(hào)生成。為此,最多可以為運(yùn)動(dòng)檢測(cè)獨(dú)立編程 16 組嵌入式有限狀態(tài)機(jī)。
2023-09-13 07:33:03
MOORE型有限狀態(tài)機(jī)的幾種設(shè)計(jì)方法是什么VHDL設(shè)計(jì)MOORE型有限狀態(tài)機(jī)時(shí)速度問題是什么
2021-05-07 06:01:38
狀態(tài)機(jī)編程的歷史很可能久于傳統(tǒng)的操作系統(tǒng), 傳統(tǒng)的一個(gè)大while 循環(huán)模式普遍用到了狀態(tài)機(jī)模式編程, 狀態(tài)機(jī)一般是基于fsm 的有限狀態(tài)機(jī),或者更先進(jìn)點(diǎn)的是hsm 分層的狀態(tài)機(jī)。具體的fsm 以及
2013-02-27 14:35:10
當(dāng)狀態(tài)機(jī)進(jìn)入一個(gè)狀態(tài)后,是把里面里面的代碼執(zhí)行一遍,還是一直執(zhí)行,一直到狀態(tài)發(fā)生改變
2014-04-03 18:38:21
控制系統(tǒng),因此飛行器的平臺(tái)部分、電機(jī)及驅(qū)動(dòng)系統(tǒng)和無線遙控接收系統(tǒng)均采用成品模塊,僅對(duì)飛行器控制系統(tǒng)的軟、硬件部分進(jìn)行研宄和開發(fā)。為了最大限度的提高四旋翼飛行器飛行時(shí)的穩(wěn)定性,其硬件安裝注意事項(xiàng)
2016-05-23 15:41:22
申請(qǐng)理由:一直在做四軸飛行器的設(shè)計(jì),有著很好的開發(fā)經(jīng)驗(yàn),而這塊開發(fā)板的傳感器恰好符合我的需求項(xiàng)目描述:以stm32作為主控 六軸陀螺儀的到飛行器姿態(tài) 氣壓計(jì)獲取飛行器高度 磁力機(jī)獲取其方向 而藍(lán)牙通過與手機(jī)連接通信 從而控制飛行器 姿態(tài)算法采用四元算法和互補(bǔ)濾波 控制直接用單級(jí)pid 簡(jiǎn)單暴力
2016-01-26 13:59:13
always模塊描述狀態(tài)輸出(可以用組合電路輸出,也可以時(shí)序電路輸出)。可以看出兩段式有限狀態(tài)機(jī)與一段式有限狀態(tài)機(jī)的區(qū)別是FSM將時(shí)序部分(狀態(tài)轉(zhuǎn)移部分)和組合部分(判斷狀態(tài)轉(zhuǎn)移條件和產(chǎn)生輸出)分開,寫為
2016-12-26 00:17:38
道并行數(shù)模轉(zhuǎn)換器之間時(shí)序問題,想用狀態(tài)機(jī)來解決。網(wǎng)上查了寫資料覺得寫的很好就分享下。PART1:1、好的狀態(tài)機(jī)標(biāo)準(zhǔn)好的狀態(tài)機(jī)的標(biāo)準(zhǔn)很多,最重要的幾個(gè)方面如下:第一,狀態(tài)機(jī)要安全,是指FSM不會(huì)進(jìn)入死循環(huán)
2015-05-25 20:33:02
申請(qǐng)理由:我們是在校大學(xué)生科研興趣團(tuán)隊(duì),正在設(shè)計(jì)制作四軸無人 項(xiàng)目。現(xiàn)在四軸無人機(jī)一般通過遙控器或者電腦上位機(jī)控制飛行。所以,我們希望通過申請(qǐng)藍(lán)牙開發(fā)套件,用手機(jī)藍(lán)牙控制四軸飛行器的運(yùn)行,對(duì)飛行器
2015-10-09 14:16:12
什么是有限狀態(tài)機(jī)FSM簡(jiǎn)述 有限狀態(tài)機(jī)(以下用FSM指代)是一種算法思想,簡(jiǎn)單而言,有限狀態(tài)機(jī)由一組狀態(tài)、一個(gè)初始狀態(tài)、輸入和根據(jù)輸入及現(xiàn)有狀態(tài)轉(zhuǎn)換為下一個(gè)狀態(tài)的轉(zhuǎn)換函數(shù)組成。在Gof的23種
2008-06-04 10:35:23
在嵌入式,機(jī)器人領(lǐng)域,由于多的復(fù)雜邏輯狀態(tài),我們編寫程序的時(shí)候不得不考慮很多種情況,容易造成功能間的沖突。有限狀態(tài)機(jī)(finite-state machine),簡(jiǎn)稱狀態(tài)機(jī),是一種表示有限個(gè)狀態(tài)以及狀態(tài)間轉(zhuǎn)移等行為的數(shù)學(xué)模型。狀態(tài)機(jī)簡(jiǎn)單來說
2021-12-20 06:51:26
了一種數(shù)字式飛行控制系統(tǒng)的總體結(jié)構(gòu)。飛行控制計(jì)算機(jī)是四旋翼飛行器自動(dòng)駕駛儀的基本組成部件。采用模塊化設(shè)計(jì)思想,設(shè)計(jì)開發(fā)一種基于PIC32 高性能單片機(jī)為核心的飛行控制計(jì)算機(jī)。四旋翼飛行器采用對(duì)稱分布
2019-04-05 07:00:00
,十字模式意味著首尾的方向會(huì)指向某個(gè)螺旋槳,而X字模式則是指首尾方向指向兩個(gè)螺旋槳中間。大多數(shù)飛行器采用的是X字模式。X字模式相對(duì)于十字模式來說,控制起來更加困難,但動(dòng)作的靈活性會(huì)更高。圖 1.1
2015-10-23 11:30:24
翼上增加拉力的空間是非常有限的,所以采用多旋翼結(jié)構(gòu)形式無疑是一種提高四旋翼飛行器負(fù)載能力的最有效手段之一。至于四旋翼結(jié)構(gòu)存在控制量較多的問題,則有望通過設(shè)計(jì)自動(dòng)飛行控制系統(tǒng)來解決。四旋翼飛行器采用四個(gè)
2013-11-28 09:29:12
上位機(jī),不適合于小型嵌入式系統(tǒng);文獻(xiàn)[3]給出了采用光流法對(duì)運(yùn)動(dòng)目標(biāo)進(jìn)行檢測(cè)的方案,但由于光流法更多地是檢測(cè)移動(dòng)目標(biāo)的速度,無法檢測(cè)地面移動(dòng)目標(biāo)相對(duì)于飛行器的位置,追蹤效果不理想;文獻(xiàn)[4]給出了采用
2018-12-03 19:35:50
本系統(tǒng)由數(shù)據(jù)信息采集、數(shù)據(jù)信號(hào)處理、飛行姿態(tài)穩(wěn)定和航向控制部分組成。系統(tǒng)選用瑞薩RX23TMCU單片機(jī)作為主控芯片,以STM32F103VET6為核心的飛控完成飛機(jī)自穩(wěn),通過超聲波傳感器來檢測(cè)飛行
2021-09-02 09:01:26
飛行器總指揮:STM32是首選,資料多,容易買。2)四軸飛行器后勤:電源是四軸飛行的保證,采用4手機(jī)鋰電池,充電芯片就用TP4056之類吧。充電接口采用USB接口,順便整合USB Bootloader
2018-01-02 16:16:52
四軸飛行器的結(jié)構(gòu)原理 四軸飛行器,又稱四旋翼飛行器、四旋翼直升機(jī),簡(jiǎn)稱四軸、四旋翼。這四軸飛行器(Quadrotor)是一種多旋翼飛行器。四軸飛行器的四個(gè)螺旋槳都是電機(jī)直連的簡(jiǎn)單機(jī)構(gòu),十字形的布局
2016-01-15 16:42:28
,十字模式意味著首尾的方向會(huì)指向某個(gè)螺旋槳,而X字模式則是指首尾方向指向兩個(gè)螺旋槳中間。大多數(shù)飛行器采用的是X字模式。X字模式相對(duì)于十字模式來說,控制起來更加困難,但動(dòng)作的靈活性會(huì)更高。圖 1.1
2015-10-23 11:21:59
STM32實(shí)現(xiàn)按鍵有限狀態(tài)機(jī)(超詳細(xì),易移植)一、狀態(tài)機(jī)簡(jiǎn)而言之,狀態(tài)機(jī)是使不同狀態(tài)之間的改變以及狀態(tài)時(shí)產(chǎn)生的相應(yīng)動(dòng)作的一種機(jī)制。1.1狀態(tài)機(jī)的四要素現(xiàn)態(tài):狀態(tài)機(jī)當(dāng)前狀態(tài)。觸發(fā)條件:改變當(dāng)前狀態(tài)
2022-02-16 06:58:52
什么是有限狀態(tài)機(jī)FSM呢?如何去實(shí)現(xiàn)有限狀態(tài)機(jī)FSM的程序設(shè)計(jì)呢?
2022-01-21 07:04:39
本文描述了一個(gè)簡(jiǎn)易四軸飛行器系統(tǒng)的設(shè)計(jì)實(shí)現(xiàn),整個(gè)方案分為遙控控制板各飛行控制板兩部分,通過2.4G無線模塊進(jìn)行控制通信,飛控系統(tǒng)采用IMU系統(tǒng)獲取姿態(tài)信息根據(jù)反饋控制算法進(jìn)行電機(jī)控制從而實(shí)現(xiàn)飛行控制
2021-03-04 06:03:00
如何建立有限狀態(tài)機(jī)的模型?如何利用狀態(tài)機(jī)進(jìn)行軟件設(shè)計(jì)?如何使用狀態(tài)機(jī)的效能分析?
2021-04-28 06:21:24
應(yīng)用,往往需要讓硬件來實(shí)現(xiàn)一些具有一定順序的工作,這就是要用到狀態(tài)機(jī)的思想。(以上摘自特權(quán)同學(xué)的《深入淺出玩轉(zhuǎn)FPGA》一書) 有限狀態(tài)機(jī)FSM(Finite State Machine)是數(shù)字電路
2014-09-25 09:35:29
有限狀態(tài)機(jī)是什么?怎樣使用狀態(tài)機(jī)思想進(jìn)行編程呢?有哪些建議?
2022-02-25 06:19:58
四軸飛行器電源控制采用的什么機(jī)制?
2023-10-08 10:18:22
飛行器的旋翼效率相對(duì)很低,從單個(gè)旋翼上增加拉力的空間是非常有限的,所以采用多旋翼結(jié)構(gòu)形式無疑是一種提高四旋翼飛行器負(fù)載能力的最有效手段之一。至于四旋翼結(jié)構(gòu)存在控制量較多的問題,則有望通過設(shè)計(jì)自動(dòng)飛行
2016-08-06 15:19:13
利用 VHDL 設(shè)計(jì)的許多實(shí)用邏輯系統(tǒng)中,有許多是可以利用有限狀態(tài)機(jī)的設(shè)計(jì)方案來描述和實(shí)現(xiàn)的。無論與基于 VHDL的其它設(shè)計(jì)方案相比,還是與可完成相似功能的 CPU 相比,狀
2008-06-04 10:33:10 75
75 提出了一種改進(jìn)的遺傳算法,針對(duì)有限狀態(tài)機(jī)中輸出矢量與狀態(tài)轉(zhuǎn)移相關(guān)的特性,將配置有限狀態(tài)機(jī)的染色體分解為狀態(tài)轉(zhuǎn)移基因和輸出矢量基因進(jìn)行分階段的進(jìn)化實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)
2009-05-10 11:55:3318 通過分析工控系統(tǒng)的特性,提出采用狀態(tài)機(jī)的思想進(jìn)行工控軟件設(shè)計(jì)。詳細(xì)論述了高速狀態(tài)機(jī)的錯(cuò)步問題以及控制層中狀態(tài)機(jī)的狀態(tài)劃分問題。結(jié)合具體的應(yīng)用實(shí)例,給出了基于狀
2009-08-10 14:26:0830 通過一個(gè)基于操作規(guī)程的虛擬訓(xùn)練系統(tǒng)研究了系統(tǒng)仿真流程,分析了有限狀態(tài)機(jī)(FSM)的原理,結(jié)合虛擬仿真訓(xùn)練的特點(diǎn),設(shè)計(jì)出了操作過程模型,并通過Windows 消息機(jī)制編程實(shí)
2009-12-07 14:23:0114 實(shí)驗(yàn)?zāi)康?
1、 熟悉用硬件描述語言(VHDL)設(shè)計(jì)一般狀態(tài)機(jī)所包含的幾個(gè)基本部分;2、 掌握用硬件描述語言(VHDL)設(shè)計(jì)Moore型和Mealy型有限狀態(tài)機(jī)的方法;3、 了解狀態(tài)
2010-09-03 09:48:170 基于有限狀態(tài)機(jī)在LIN總線開發(fā)中的應(yīng)用
引言
隨著汽車智能化程度的提高和迅速升級(jí)
2010-04-20 13:47:43737 
有限狀態(tài)機(jī)設(shè)計(jì)的關(guān)鍵是如何把一個(gè)實(shí)際的時(shí)序邏輯關(guān)系抽象成一個(gè)時(shí)序邏輯函數(shù),傳統(tǒng)的電路圖輸入法通過直接設(shè)計(jì)寄存器組來實(shí)現(xiàn)各個(gè)狀態(tài)之間的轉(zhuǎn)換, 而用硬件描述語言來描述有限
2011-11-11 09:49:281887 
設(shè)計(jì)了有限狀態(tài)機(jī)模型,實(shí)現(xiàn)了對(duì)不同設(shè)備命令的統(tǒng)一轉(zhuǎn)換。基于統(tǒng)一命令轉(zhuǎn)換,實(shí)現(xiàn)了Telnet對(duì)遠(yuǎn)程設(shè)備的統(tǒng)一命令配置,通過SNMP協(xié)議可視化配置設(shè)備更加方便。
2011-12-14 14:35:4722 有限狀態(tài)機(jī)及其設(shè)計(jì)技術(shù)是數(shù)字系統(tǒng)設(shè)計(jì)中的重要組成部分,是實(shí)現(xiàn)高效率、高可靠性邏輯控制的重要途徑。本文論述了兩種針對(duì)狀態(tài)機(jī)的綜合策略實(shí)現(xiàn)
2012-01-05 10:34:212056 
為了能夠更簡(jiǎn)潔嚴(yán)謹(jǐn)?shù)孛枋鯩TM總線的主模塊有限狀態(tài)機(jī)的狀態(tài)轉(zhuǎn)換,同時(shí)減少FPGA芯片功耗,提高系統(tǒng)穩(wěn)定性,文中在分析MTM總線結(jié)構(gòu)和主模塊有限狀態(tài)機(jī)模型的基礎(chǔ)上,基于VHDL語言采
2012-05-29 15:39:0920 本文詳 細(xì)論述了高速狀態(tài)機(jī)的錯(cuò)步問題以及控制層中狀態(tài)機(jī)的狀態(tài)劃分問題,結(jié)合具體的應(yīng)用實(shí)例,給出了基于狀態(tài)機(jī)的實(shí)現(xiàn)方法。
2016-03-22 15:48:303 本文主要介紹了IP模塊的有限狀態(tài)機(jī)的實(shí)現(xiàn)。
2016-03-22 15:42:470 本文通過舉例 利用VHDL 語言描述了不同模式的有限狀態(tài)機(jī) 分析了有限狀態(tài)機(jī)在 PLD 中綜合的特點(diǎn) 。
2016-03-22 15:41:363 如何使嵌入式軟件代碼更加可靠 增強(qiáng)程序的可維護(hù)性 一直以來都是嵌入式程序員追 求的目標(biāo)。論述了有限狀態(tài)機(jī)的原理和其實(shí)現(xiàn)方法;采用狀態(tài)機(jī)方法編寫了一個(gè)按鍵掃描程序介紹了狀態(tài)機(jī)編程在嵌入式系統(tǒng)中的實(shí)際應(yīng)用和優(yōu)點(diǎn)。
2016-03-22 15:40:221 本文提出一種優(yōu)秀 、高效的 Verilog HDL 描述方式來進(jìn)行有限狀態(tài)機(jī)設(shè)計(jì) 介紹了 有限狀態(tài)機(jī)的建模原則 并通過一個(gè)可綜合的實(shí)例 驗(yàn)證了 該方法設(shè)計(jì)的有限狀態(tài)機(jī)在面積和功耗上的優(yōu)勢(shì)。
2016-03-22 15:19:411 EDA的有限狀態(tài)機(jī),廣義而言是指只要涉及觸發(fā)器的電路,無論電路大小都可以歸結(jié)為狀態(tài)機(jī)。有限狀態(tài)機(jī)設(shè)計(jì)在學(xué)習(xí)EDA時(shí)是很重要的一章。
2016-06-08 16:46:103 有限狀態(tài)機(jī)在數(shù)控系統(tǒng)軟件中的應(yīng)用研究,感興趣的小伙伴們可以看看。
2016-07-26 10:43:0620 有限狀態(tài)機(jī)在嵌入式軟件中的應(yīng)用,感興趣的小伙伴們可以看看。
2016-07-26 10:43:0627 基于有限狀態(tài)機(jī)的五橋臂逆變器改進(jìn)調(diào)制策略_梅楊
2017-01-08 13:58:480 有限狀態(tài)機(jī)(FSM)是一種常見的電路,由時(shí)序電路和組合電路組成。設(shè)計(jì)有限狀態(tài)機(jī)的第一步是確定采用Moore狀態(tài)機(jī)還是采用Mealy狀態(tài)機(jī)。
2017-02-11 13:51:403882 
基于有限狀態(tài)機(jī)的Linux多點(diǎn)觸摸屏驅(qū)動(dòng)設(shè)計(jì)_劉斌
2017-03-15 08:00:000 ”,當(dāng)系統(tǒng)時(shí)鐘頻率、操作密度大幅提高時(shí),極易引起時(shí)序邏輯錯(cuò)誤。為此,研究了一種基于存儲(chǔ)器映射的有限狀態(tài)機(jī)邏輯實(shí)現(xiàn)方法,對(duì)FPGA資源進(jìn)行選擇性使
2017-11-17 02:30:073184 
本文主要介紹了是如何利用74LS161實(shí)現(xiàn)復(fù)雜狀態(tài)機(jī)的。時(shí)序邏輯電路的數(shù)學(xué)模型是有限狀態(tài)機(jī)。有限狀態(tài)機(jī)它把復(fù)雜的控制邏輯分解成有限個(gè)穩(wěn)定狀態(tài),在每個(gè)狀態(tài)上判斷事件,變連續(xù)處理為離散數(shù)字處理,符合計(jì)算機(jī)的工作特點(diǎn)。本文主要討論使用MSI同步計(jì)數(shù)器74LS161進(jìn)行復(fù)雜狀態(tài)機(jī)的設(shè)計(jì)。
2018-01-18 09:00:028299 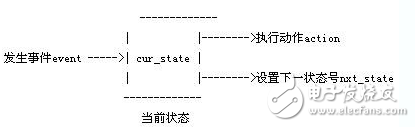
隨著微電子技術(shù)的迅速發(fā)展,人們對(duì)數(shù)字系統(tǒng)的需求也在提高。不僅要有完善的功能,而且對(duì)速度也提出了很高的要求。對(duì)于大部分?jǐn)?shù)字系統(tǒng),都可以劃分為控制單元和數(shù)據(jù)單元兩個(gè)組成部分。通常,控制單元的主體是一個(gè)有限狀態(tài)機(jī),它接收外部信號(hào)以及數(shù)據(jù)單元產(chǎn)生的狀態(tài)信息,產(chǎn)生控制信號(hào)序列。
2019-06-10 08:03:004833 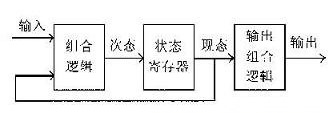
有限狀態(tài)機(jī)(finite state machine)簡(jiǎn)稱FSM,表示有限個(gè)狀態(tài)及在這些狀態(tài)之間的轉(zhuǎn)移和動(dòng)作等行為的數(shù)學(xué)模型,在計(jì)算機(jī)領(lǐng)域有著廣泛的應(yīng)用。FSM是一種邏輯單元內(nèi)部的一種高效編程方法,在服務(wù)器編程中,服務(wù)器可以根據(jù)不同狀態(tài)或者消息類型進(jìn)行相應(yīng)的處理邏輯,使得程序邏輯清晰易懂。
2019-05-15 16:53:391813 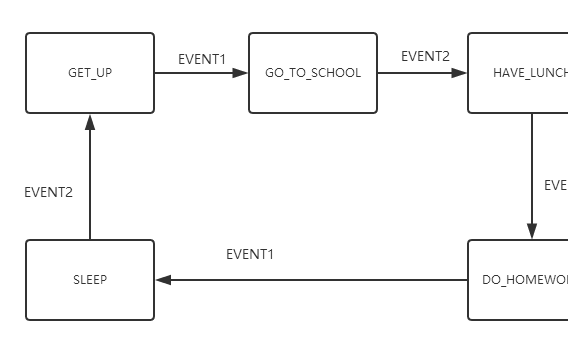
有限狀態(tài)機(jī)是一種具有離散輸入輸出系統(tǒng)的模型,在任何時(shí)刻都處于一個(gè)特定的狀態(tài)。對(duì)于事件驅(qū)動(dòng)的程序設(shè)計(jì),它是非常有用的設(shè)計(jì)模型。在某一個(gè)狀態(tài)下有事件發(fā)生時(shí),根據(jù)當(dāng)前狀態(tài)和輸入事件的不同,選擇如何處
2020-05-03 17:49:002402 摩爾型的有限狀態(tài)機(jī)的輸出只與當(dāng)前狀態(tài)有關(guān),而與輸入信號(hào)的當(dāng)前值無關(guān),且僅豐時(shí)鐘信號(hào)邊沿到來時(shí)才發(fā)生變化。
2020-08-08 10:57:007842 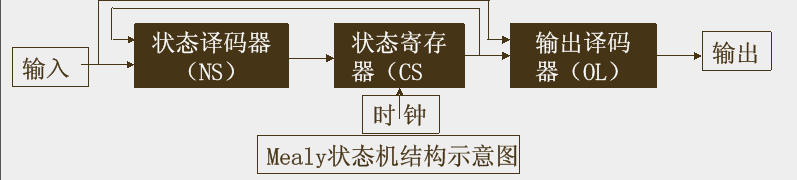
有限狀態(tài)機(jī)是絕大部分控制電路的核心結(jié)構(gòu), 是表示有限個(gè)狀態(tài)以及在這些狀態(tài)之間轉(zhuǎn)移和動(dòng)作等行為的數(shù)學(xué)模型。有限狀態(tài)機(jī)是指輸出取決于過去輸入部分和當(dāng)前輸入部分的時(shí)序邏輯電路。一般來說, 除了輸入部分和
2020-11-04 17:17:0412 工作的能力,其信息傳輸?shù)拇_定性離不開其內(nèi)部的時(shí)鐘同步機(jī)制的支持。時(shí)鐘同步機(jī)制可根據(jù)該節(jié)點(diǎn)啟動(dòng)的不同工作階段,定義成不同的工作狀態(tài),如初始化、等待接收同步幀等。考慮到傳統(tǒng)的FSM方法建立模型存在代碼難以復(fù)用、維護(hù)困難等問題,本文基于量子框架的角度,采用有限狀態(tài)機(jī)的方法對(duì)FlexRay時(shí)鐘同步機(jī)制進(jìn)行研究。
2021-03-31 10:22:272908 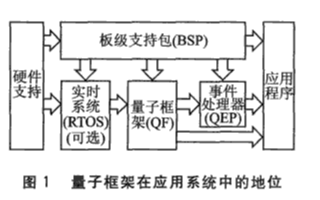
有限狀態(tài)機(jī)的設(shè)計(jì)是HDL Designer Series?工具的關(guān)鍵應(yīng)用。 盡可能地對(duì)于設(shè)計(jì)人員編寫導(dǎo)致狀態(tài)機(jī)性能不佳的VHDL,可以使用HDL Designer用于生成VHDL的Series?工具
2021-04-08 10:05:233 多旋翼飛行器設(shè)計(jì)與控制的狀態(tài)估計(jì)
2021-09-14 09:29:050 ? 一、介紹 EFSM(event finite state machine,事件驅(qū)動(dòng)型有限狀態(tài)機(jī)),是一個(gè)基于事件驅(qū)動(dòng)的有限狀態(tài)機(jī),主要應(yīng)用于嵌入式設(shè)備的軟件系統(tǒng)中。 EFSM的設(shè)計(jì)原則是:簡(jiǎn)單
2021-11-16 15:29:102036 STM32實(shí)現(xiàn)按鍵有限狀態(tài)機(jī)(超詳細(xì),易移植)一、狀態(tài)機(jī)簡(jiǎn)而言之,狀態(tài)機(jī)是使不同狀態(tài)之間的改變以及狀態(tài)時(shí)產(chǎn)生的相應(yīng)動(dòng)作的一種機(jī)制。1.1狀態(tài)機(jī)的四要素現(xiàn)態(tài):狀態(tài)機(jī)當(dāng)前狀態(tài)。觸發(fā)條件:改變當(dāng)前狀態(tài)
2021-12-17 18:37:1025 關(guān)注、星標(biāo)公眾號(hào),直達(dá)精彩內(nèi)容文章來源:頭條-嵌入式在左C語言在右鏈接:https://www.toutiao.com/i6843028812112855564/有限狀態(tài)機(jī)概念有限狀態(tài)機(jī)...
2022-01-13 13:32:2314 有限狀態(tài)機(jī)又稱有限狀態(tài)自動(dòng)機(jī),簡(jiǎn)稱狀態(tài)機(jī),是表示有限個(gè)狀態(tài)以及在這些狀態(tài)之間的轉(zhuǎn)移和動(dòng)作等行為的數(shù)學(xué)計(jì)算模型,用英文縮寫也被簡(jiǎn)...
2022-02-07 11:23:284 本文描述了有限狀態(tài)機(jī)的基礎(chǔ)知識(shí),并展示了在 Verilog 硬件描述語言中實(shí)現(xiàn)它們的實(shí)用方法。
2022-04-26 16:20:012860 
有限自動(dòng)機(jī)(Finite Automata Machine)是計(jì)算機(jī)科學(xué)的重要基石,它在軟件開發(fā)領(lǐng)域內(nèi)通常被稱作有限狀態(tài)機(jī)(Finite State Machine),是一種應(yīng)用非常廣泛的軟件設(shè)計(jì)
2022-09-14 10:55:271246 電子發(fā)燒友網(wǎng)站提供《帶有有限狀態(tài)機(jī)的機(jī)械臂對(duì)象收集器.zip》資料免費(fèi)下載
2022-12-27 10:08:220 EFSM(event finite state machine,事件驅(qū)動(dòng)型有限狀態(tài)機(jī)),是一個(gè)基于事件驅(qū)動(dòng)的有限狀態(tài)機(jī),主要應(yīng)用于嵌入式設(shè)備的軟件系統(tǒng)中。
2023-02-11 10:17:15711 在Verilog HDL中可以用許多種方法來描述有限狀態(tài)機(jī),最常用的方法是用always語句和case語句。
2023-03-23 14:06:11374 有限狀態(tài)機(jī)是由寄存器組和組合邏輯構(gòu)成的硬件時(shí)序電路,其狀態(tài)(即由寄存器組的1和0的組合狀態(tài)所構(gòu)成的有限個(gè)狀態(tài))只可能在同一時(shí)鐘跳變沿的情況下才能從一個(gè)狀態(tài)轉(zhuǎn)向另一個(gè)狀態(tài),究竟轉(zhuǎn)向哪一狀態(tài)還是留在原狀態(tài)不但取決于各個(gè)輸入值,還取決于當(dāng)前所在狀態(tài)。這里是指Mealy型有限狀態(tài)機(jī)。
2023-04-07 09:52:46909 有限狀態(tài)機(jī)(Finite-State Machine,F(xiàn)SM),簡(jiǎn)稱狀態(tài)機(jī),是表示有限個(gè)狀態(tài)以及在這些狀態(tài)之間的轉(zhuǎn)移和動(dòng)作等行為的數(shù)學(xué)模型。
2023-06-01 15:23:391260 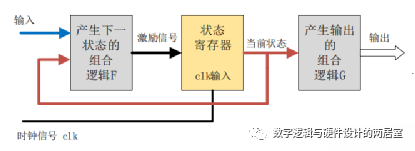
電子發(fā)燒友網(wǎng)站提供《LSM6DSOX嵌入式有限狀態(tài)機(jī)的使用和配置.pdf》資料免費(fèi)下載
2023-07-31 10:55:110 EFSM(event finite state machine,事件驅(qū)動(dòng)型有限狀態(tài)機(jī)),是一個(gè)基于事件驅(qū)動(dòng)的有限狀態(tài)機(jī),主要應(yīng)用于嵌入式設(shè)備的軟件系統(tǒng)中。 EFSM的設(shè)計(jì)原則是:簡(jiǎn)單!EFSM的使用者只需要關(guān)心:
2023-08-30 09:28:51448 
有限狀態(tài)機(jī),簡(jiǎn)稱狀態(tài)機(jī),通俗的說,就是把全部的情況分成幾個(gè)場(chǎng)景,這些場(chǎng)景的工作方式明顯不同。簡(jiǎn)單來說就是如下所示的狀態(tài)轉(zhuǎn)移圖
2023-08-31 15:30:49585 
如果一個(gè)對(duì)象(系統(tǒng)或機(jī)器),由若干個(gè)狀態(tài)構(gòu)成,在某種條件下觸發(fā)這些狀態(tài),會(huì)發(fā)生狀態(tài)相互轉(zhuǎn)移的事件,那么此對(duì)象稱之為狀態(tài)機(jī)。
2023-09-17 16:42:341517 BGP有限狀態(tài)機(jī)共有六種狀態(tài),分別是Idle、Connect、Active、OpenSent、OpenConfirm和Established。
2023-10-07 14:56:55899 有限狀態(tài)機(jī)分割設(shè)計(jì),其實(shí)質(zhì)就是一個(gè)狀態(tài)機(jī)分割成多個(gè)狀態(tài)機(jī)
2023-10-09 10:47:06330 狀態(tài)機(jī),又稱有限狀態(tài)機(jī)(Finite State Machine,F(xiàn)SM)或米利狀態(tài)機(jī)(Mealy Machine),是一種描述系統(tǒng)狀態(tài)變化的模型。在芯片設(shè)計(jì)中,狀態(tài)機(jī)被廣泛應(yīng)用于各種場(chǎng)景,如CPU指令集、內(nèi)存控制器、總線控制器等。
2023-10-19 10:27:553419 電子發(fā)燒友網(wǎng)站提供《基于有限狀態(tài)機(jī)的車身防盜報(bào)警的實(shí)現(xiàn).pdf》資料免費(fèi)下載
2023-10-26 09:48:480 有限狀態(tài)機(jī)(Finite State Machine,簡(jiǎn)稱FSM)是一種用來進(jìn)行對(duì)象行為建模的工具,其作用主要是描述對(duì)象在它的生命周期內(nèi)所經(jīng)歷的狀態(tài)序列以及如何響應(yīng)來自外界的各種事件。
2024-02-17 16:09:00619 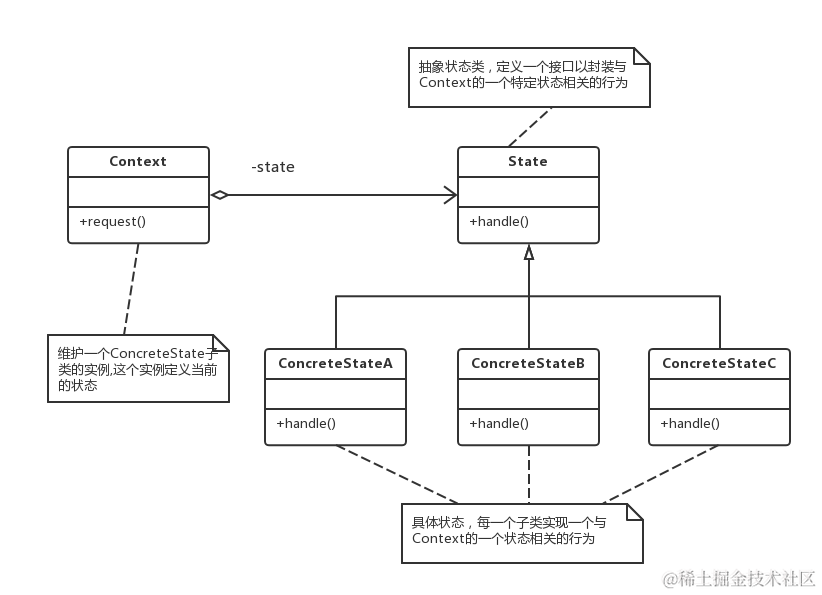
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論