電動(dòng)車設(shè)計(jì)方案電路原理圖分析
摘?要
????? 隨著單片機(jī)技術(shù)的飛速發(fā)展,以及電動(dòng)機(jī)驅(qū)動(dòng)芯片性能的日益完善,本設(shè)計(jì)系統(tǒng)通過單片機(jī)控制直流電動(dòng)機(jī)實(shí)現(xiàn)了電動(dòng)車在符合規(guī)定要求的蹺蹺板上的規(guī)定運(yùn)動(dòng):在規(guī)定時(shí)間內(nèi)的前進(jìn)、后退運(yùn)行;蹺蹺板處于平衡狀態(tài)時(shí)以及到達(dá)蹺蹺板末端的停車候時(shí);分階段實(shí)時(shí)顯示其行駛所用時(shí)間。該設(shè)計(jì)系統(tǒng)采用雙CPU設(shè)計(jì)思路:選用AT89S52作為主CPU,主要完成對(duì)數(shù)據(jù)采集系統(tǒng)的數(shù)據(jù)處理,控制,電動(dòng)車的實(shí)時(shí)顯示,以及主從CPU的通信功能;選用AT89C2051作為從CPU,控制電機(jī)的轉(zhuǎn)速。該設(shè)計(jì)系統(tǒng)中采用脈沖寬度調(diào)制技術(shù)(PWM)實(shí)現(xiàn)對(duì)直流電動(dòng)機(jī)的準(zhǔn)確與靈活調(diào)速。
1.?? 系統(tǒng)設(shè)計(jì)
1.1總體方案分析論證
?? ?根據(jù)設(shè)計(jì)要求,以系統(tǒng)核心控制功能的實(shí)現(xiàn)為根本,提出兩種系統(tǒng)總體設(shè)計(jì)方案進(jìn)行分析論證:
方案一:采用中大規(guī)模的可編程邏輯電路作為核心控制部分,其功能模塊包括標(biāo)識(shí)線檢測(cè),行車路線矯正,實(shí)時(shí)顯示,電機(jī)控制等。各個(gè)功能模塊狀態(tài)的保持或轉(zhuǎn)移的條件取決于傳感器采集的信號(hào)。對(duì)應(yīng)的系統(tǒng)結(jié)構(gòu)框圖如圖1.1.1所示。
方案二:采用51系列單片機(jī)作為控制核心,并且采用主、從結(jié)構(gòu)的雙CPU系統(tǒng)設(shè)計(jì)思路:選用AT89S52作為主CPU,主要完成數(shù)據(jù)的采集、處理,電動(dòng)車狀態(tài)的實(shí)時(shí)顯示,以及主從CPU的通信功能;選用AT89C2051作為從CPU,利用該型號(hào)單片機(jī)具備的脈沖寬度調(diào)制輸出功能實(shí)現(xiàn)對(duì)直流電動(dòng)機(jī)的準(zhǔn)確與靈活的調(diào)速。此種設(shè)計(jì)思路可以有效的提高整機(jī)的實(shí)時(shí)控制性能,而且余留了大量的內(nèi)存和接口,為系統(tǒng)進(jìn)一步的功能擴(kuò)展奠定了基礎(chǔ)。對(duì)應(yīng)的系統(tǒng)結(jié)構(gòu)框圖如圖1.1.2所示。

?
????? 上述兩種方案理論上都是可行的,方案一原理簡(jiǎn)單,但在為了簡(jiǎn)化電路構(gòu)成,選用大規(guī)模集成邏輯電路的同時(shí),也令設(shè)計(jì)系統(tǒng)的成本大幅提升,從而使整機(jī)的性價(jià)比大大降低;方案二,選用性價(jià)比高的單片機(jī)構(gòu)成雙CPU系統(tǒng),能夠充分發(fā)揮單片機(jī)在小規(guī)模自動(dòng)化設(shè)計(jì)系統(tǒng)的性價(jià)比優(yōu)勢(shì),而且因設(shè)計(jì)者對(duì)單片機(jī)應(yīng)用技術(shù)掌握的相對(duì)更加熟練,在設(shè)計(jì)調(diào)試過程中,可操作性更強(qiáng),發(fā)揮的空間也更大,因此我們選用了實(shí)用性較強(qiáng)的方案二。
????????????????????????????????????????? ??????
1.2主要功能模塊方案分析論證
????? 根據(jù)系統(tǒng)功能設(shè)計(jì)要求,該設(shè)計(jì)系統(tǒng)應(yīng)包括:平衡檢測(cè)模塊、定位檢測(cè)模塊、直流電機(jī)驅(qū)動(dòng)模塊等三大功能模塊。
1.2.1平衡檢測(cè)模塊方案論證
????? 平衡檢測(cè)模塊的主要功能是實(shí)現(xiàn)系統(tǒng)檢測(cè)、驅(qū)動(dòng)、再檢測(cè)、再驅(qū)動(dòng)的一個(gè)循環(huán)修正電動(dòng)車行駛路線,確保實(shí)現(xiàn)電動(dòng)車在蹺蹺板上準(zhǔn)確的按要求自動(dòng)往返運(yùn)行,平衡停滯待時(shí),末端停滯待時(shí),并能將采集到的相關(guān)測(cè)試信號(hào)送系統(tǒng)控制器進(jìn)行小車行駛時(shí)間和平衡靜止時(shí)的狀態(tài)指示。根據(jù)所要實(shí)現(xiàn)的功能要求,我們提出兩種設(shè)計(jì)方案:
方案一:使用角度傳感器完成平衡檢測(cè)部分。將角度傳感器安裝在支撐平板半圓柱塊的頂端,板與地面有夾角變化,傳感器的輸出電壓也相應(yīng)地改變,被檢測(cè)后送到單片機(jī)內(nèi)進(jìn)行處理,再由單片機(jī)對(duì)電機(jī)發(fā)出相應(yīng)的控制信號(hào)。
方案二:自制一個(gè)透明的,直徑約為1cm的塑料管,將一實(shí)心小鐵球置入其內(nèi),兩端封閉,在管的兩端處分別安放一組對(duì)射式紅外對(duì)管,將此裝置平放在小車上,小車在板的中間處時(shí),如果小球不是處于中間位置附近,就會(huì)滑到管的兩端,對(duì)管的接收部分將接收不同的信號(hào),經(jīng)過處理后送到單片機(jī)進(jìn)行處理,從而發(fā)出對(duì)電機(jī)的控制信號(hào),調(diào)節(jié)板與地的夾角,直至其平衡。
????? 通過試驗(yàn),發(fā)現(xiàn)方案一測(cè)量起來非常復(fù)雜,信號(hào)處理電路也比較繁瑣,方案二新穎別致,只要在調(diào)平衡的過程中掌握好電機(jī)的步距,特別注意微調(diào),是能夠達(dá)到功能控制要求的,因此我們選用了方案二來實(shí)現(xiàn)平衡檢測(cè)功能。
1.2.2定位檢測(cè)模塊
????? 根據(jù)題目設(shè)計(jì)要求,電動(dòng)車從A點(diǎn)出發(fā),B點(diǎn)停止5s,然后原路返回停到A點(diǎn),為了使電動(dòng)車能夠穩(wěn)定地停靠在規(guī)定的區(qū)域內(nèi),單片機(jī)只有實(shí)時(shí)獲取其行駛狀態(tài),不斷作出相應(yīng)調(diào)整。因此我們分別從兩個(gè)方面進(jìn)行考慮:一方面,我們通過實(shí)驗(yàn)計(jì)算每一段的行駛距離來控制電動(dòng)車的起動(dòng)和停止位置;另一方面,在題目允許的范圍內(nèi),我們可以在A、B、C三點(diǎn)分別作一橫向的黑帶,運(yùn)用檢測(cè)裝置完成信號(hào)的采集,從而便于單片機(jī)對(duì)電動(dòng)車的控制。基于此,我們提出以下兩種設(shè)計(jì)方案。
方案一:選用霍爾傳感器檢測(cè)電動(dòng)車行駛的速度。在車輪上均勻安裝若干個(gè)磁片,將霍爾集成片安裝在固定軸上,隨著輪子的轉(zhuǎn)動(dòng),將得到脈沖,即對(duì)應(yīng)電動(dòng)車的車輪轉(zhuǎn)速。
方案二:使用反射式光電傳感器對(duì)已設(shè)定的標(biāo)志進(jìn)行檢測(cè)完成對(duì)應(yīng)功能。在A、B、C三點(diǎn)均作出標(biāo)志后,在小車的頭部和尾部分別安裝一個(gè)反射式傳感器,保證電動(dòng)車在往返時(shí)啟動(dòng)和停止功能的實(shí)現(xiàn)。對(duì)應(yīng)原理圖參電機(jī)專用驅(qū)動(dòng)芯片1.2.1所示。
綜合考慮上述方案,發(fā)現(xiàn)方案一中霍爾傳感器安裝較困難,測(cè)量精度無法滿足題目要求,而方案二檢測(cè)可靠性與精度都較高,并且易于實(shí)現(xiàn),因此采用方案二。

?
1.2.3 直流驅(qū)動(dòng)模塊
????? 電動(dòng)車電機(jī)的驅(qū)動(dòng)系統(tǒng)的性能在很大程度上決定了電動(dòng)車的整體運(yùn)行性能,在電動(dòng)車電動(dòng)機(jī)的選擇上,我們選用性價(jià)比高、控制簡(jiǎn)單的直流電機(jī)。直流電機(jī)的驅(qū)動(dòng)方法很多,下面提出兩種方案進(jìn)行分析論證。
方案一:H型橋式驅(qū)動(dòng)電路。這種電路應(yīng)用十分廣泛,在本設(shè)計(jì)系統(tǒng)中要不斷地使電機(jī)在在正轉(zhuǎn)和反轉(zhuǎn)之間切換,也就是由S1、S2導(dǎo)通且S3、S4關(guān)斷,到S1、S2關(guān)斷且S3、 S4導(dǎo)通,這將令電路的功能調(diào)試工作較煩瑣,且系統(tǒng)的硬件電路略顯復(fù)雜。其工作原理示意圖參見附錄圖 1.2.2所示。
方案二:采用集成橋式電機(jī)專用驅(qū)動(dòng)芯片。比如使用L298、LMD18200等集成芯片,這一設(shè)計(jì)方案可令系統(tǒng)的控制電路簡(jiǎn)潔,且可靠性高。
綜合考慮,我們選用方案二實(shí)現(xiàn)直流電機(jī)的驅(qū)動(dòng)。
1.3 系統(tǒng)硬件設(shè)計(jì)
1.3.1 檢測(cè)電路設(shè)計(jì)
??? ??光電傳感器廣泛應(yīng)用于檢測(cè)電路中,按結(jié)構(gòu)形式可以分為反射式和對(duì)射式。本設(shè)計(jì)系統(tǒng)中電動(dòng)車的行車路線檢測(cè),起停檢測(cè)電路都要有反射式光電傳感器完成,我們直接選用TCRT5000傳感器,它是將一對(duì)紅外發(fā)射、接收對(duì)管按合理的發(fā)射、反射接收角度安裝在一個(gè)封裝內(nèi),從而安裝使用非常方便,測(cè)試準(zhǔn)確度高;而平衡性檢測(cè)電路由對(duì)射式光電傳感器完成,此發(fā)射接受電路是有分立器件自行安裝、調(diào)試的,測(cè)試結(jié)果理想。
??? ??
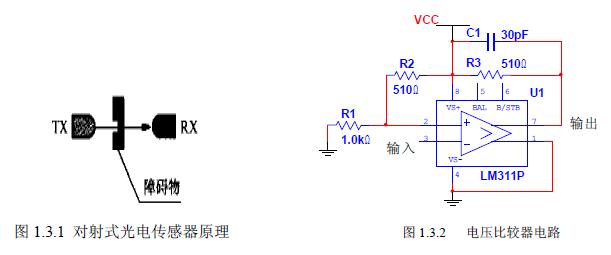
?????? 對(duì)射式光電傳感器也是由紅外線發(fā)射管、接收管構(gòu)成,并且二者位于同一直線上,相距約10~20mm,兩管間沒有障礙物時(shí)接收管接收到的紅外線明顯不同于有障礙物時(shí),這樣在接收端就會(huì)產(chǎn)生高低電平信號(hào)。為了讓電動(dòng)車行駛到C點(diǎn),蹺蹺板達(dá)到平衡,我們制作了一個(gè)圓筒,并將其水平放在小車上,通過檢測(cè)其內(nèi)的小球所處的位置來調(diào)整電動(dòng)車的位置,從而達(dá)到板的平衡。其檢測(cè)原理圖參見附錄圖1.3.1所示,在設(shè)計(jì)中,我們?cè)趫A筒的兩端分別安裝一個(gè)對(duì)射式光電傳感器。
?
????? 直接對(duì)光電傳感器電路進(jìn)行測(cè)試時(shí)發(fā)現(xiàn),沒有障礙物時(shí),輸出電壓可達(dá)到4.4V,有障礙物時(shí)電壓只有0.2V,由于接收端易受到干擾,應(yīng)將采集到的信號(hào)經(jīng)過整形,比較電路,使其輸出能夠滿足TTL邏輯電平,并且可以改善輸出端的抗干擾特性。施密特觸發(fā)器的整形功能比較強(qiáng),但是電壓不易調(diào)節(jié),若利用電壓比較器,只要提供合適的參考電壓,就可以精確地輸出脈沖波形,綜合考慮我們選用性能較好的電壓比較器電路。其原理圖如圖1.3.2所示。?
????? 在上圖中,我們使用了專用集成電壓比較器LM311,對(duì)輸入的信號(hào)進(jìn)行處理。端口2是參考電壓輸入端,當(dāng)輸入信號(hào)幅值大于參考電壓時(shí),輸出端7就會(huì)輸出低電平,反之亦反。考慮檢測(cè)系統(tǒng)所測(cè)得的信號(hào)大小,我們?cè)O(shè)定參考電壓為3V。LM311的參考電壓與電源電壓的關(guān)系為:
????? 在用Multisim軟件進(jìn)行仿真時(shí),我們發(fā)現(xiàn)輸出信號(hào)的高電平上出現(xiàn)了毛刺現(xiàn)象,為此我們?cè)陔娫春洼敵龆酥g接入了一個(gè)30pF的電容,效果很好。
??????
1.3.2 驅(qū)動(dòng)電路設(shè)計(jì)
????? 在本設(shè)計(jì)系統(tǒng)中,選用的是ST公司的L298N電機(jī)專用驅(qū)動(dòng)芯片。該芯片的主要特點(diǎn)是:工作電壓高,最高工作電壓可達(dá)46V;輸出電流大,瞬間峰值電流可達(dá)3A,持續(xù)工作電流為2A;內(nèi)含兩個(gè)H橋的高電壓大電流全橋式驅(qū)動(dòng)器,可以用來驅(qū)動(dòng)直流電動(dòng)機(jī)和步進(jìn)電動(dòng)機(jī)、繼電器、線圈等感性負(fù)載;采用標(biāo)準(zhǔn)邏輯電平信號(hào)控制;具有兩個(gè)使能控制端,在不受輸入信號(hào)影響的情況下允許或禁止器件工作有一個(gè)邏輯電源輸入端,使內(nèi)部邏輯電路部分在低電壓下工作;可以外接檢測(cè)電阻,將變化量反饋給控制電路。
???? 由L298N 構(gòu)成的驅(qū)動(dòng)電路參見附錄圖1.3.3?所示。

1.3.3 顯示電路設(shè)計(jì)
????? 采用LED顯示,其特點(diǎn)是亮度大,視覺效果好。LED顯示按不同分類方法可分為串行顯示和并行顯示也可分為靜態(tài)顯示和動(dòng)態(tài)顯示。可采用的方法有: MAX7219串行動(dòng)態(tài)顯示、74HC164串行靜態(tài)顯示、8279并行動(dòng)態(tài)顯示等多種方法。由于本設(shè)計(jì)采用干電池供電,在電路設(shè)計(jì)中應(yīng)盡量降低功耗。
????? 采用LCD顯示。液晶顯示器集成度高,減少器件數(shù)目降低了功耗,同時(shí)也降低了電路的復(fù)雜性。而且液晶顯示器本身功耗很小,非常適合于這種電源容量有限的系統(tǒng)。但是液晶顯示也有其缺點(diǎn),就是顯示亮度不夠,視覺效果不是很好。
????? 綜合考慮題目要求,我們選用功能強(qiáng)大的CH451,它整合了數(shù)碼管顯示驅(qū)動(dòng)和鍵盤掃描控制以及uP監(jiān)控的多功能外圍芯片。由CH451構(gòu)成的顯示電路參見附錄圖1.3.4所示。

1.4 系統(tǒng)軟件設(shè)計(jì)
????? 系統(tǒng)軟件設(shè)計(jì)分模塊進(jìn)行,主要包括:主機(jī)主程序模塊、從機(jī)的PWM調(diào)速程序模塊
主機(jī)程序流程圖如圖1.4.1所示:

????? 從機(jī)程序流程圖如圖
2. 系統(tǒng)測(cè)試
2.1 系統(tǒng)測(cè)試的儀器設(shè)備及其材料組成
?????? 數(shù)字萬用表,數(shù)字示波器,可調(diào)電源箱,偉福6000軟件模擬器,偉福VW軟件仿真器,1600mmX300mm蹺蹺板,卷尺,秒表。
2.2 調(diào)試方法和步驟
????? 調(diào)試時(shí)也是先模塊后整體,可明顯分為光電傳感器模塊,紅外對(duì)管模塊,PWM調(diào)速模塊,顯示、報(bào)警模塊,每個(gè)小模塊調(diào)通后,將它們組合一整體進(jìn)行調(diào)試。
A、光電傳感器模塊:首先用數(shù)字萬用表測(cè)試模塊的輸出,待符合要求后再安裝到電動(dòng)車上進(jìn)行調(diào)試,最終發(fā)現(xiàn)光電傳感器離地面約6cm時(shí)效果最好。
B、紅外對(duì)管模塊:首先調(diào)試成功一組對(duì)管,然后將兩組對(duì)管組合起來進(jìn)行測(cè)試,這一模塊應(yīng)和PWM模塊配合調(diào)試。
C、PWM模塊調(diào)試:不斷改變PWM波的周期和占空比使電動(dòng)車能夠迅速爬坡,穩(wěn)定平衡,下坡,停止。
D、顯示、報(bào)警模塊:編寫顯示、報(bào)警程序,燒至單片機(jī)驗(yàn)證這一模塊均可正常工作。
????? 最終將四個(gè)模塊整合成一個(gè)整體進(jìn)行調(diào)試,完成了電動(dòng)車上坡,中點(diǎn)平衡,終點(diǎn)停止功能,并且均達(dá)到了設(shè)計(jì)要求。
測(cè)試數(shù)據(jù):
|
PWM波占空比 |
上坡時(shí)間(s)??????? |
平衡位置(s) |
下坡時(shí)間(s) |
返回時(shí)間(s) |
|
20%??????????????????? |
14 |
5 |
6 |
13 |
|
20% |
14 |
5 |
6 |
12 |
|
20% |
15 |
5 |
5 |
15 |
|
20% |
14 |
5 |
5 |
13 |
|
20% |
15 |
6 |
6 |
15 |
2.3 測(cè)試結(jié)論
2.3.1 功能實(shí)現(xiàn)
????? 以上測(cè)試結(jié)果表明,本設(shè)計(jì)完成了基本要求的基礎(chǔ)之上,精化了各項(xiàng)指標(biāo),上、下坡迅速平穩(wěn),平衡時(shí)間和板的平衡度基本達(dá)到了要求,往返時(shí)的停止位置也在要求的范圍內(nèi)。
在不加配重的情況下,電動(dòng)車完成以下運(yùn)動(dòng):
(1)電動(dòng)車從起始端A出發(fā),在15秒鐘內(nèi)行駛到中心點(diǎn)C附近;
(2)20秒鐘之內(nèi),電動(dòng)車在中心點(diǎn)C附近使蹺蹺板處于平衡狀態(tài),保持平衡5秒鐘,并給出燈光的平衡指示;
(3)電動(dòng)車從(2)中的平衡點(diǎn)出發(fā),6秒鐘內(nèi)行駛到蹺蹺板末端B處(車頭距蹺蹺板末端B不大于50mm);
(4)電動(dòng)車在B點(diǎn)停止5秒后,15秒內(nèi)倒退回起始端A,完成整個(gè)行程;
(5)在整個(gè)行駛過程中,電動(dòng)車始終在蹺蹺板上,并分階段實(shí)時(shí)顯示電動(dòng)車行駛所用的時(shí)間。
?2.3.2 誤差分析
???? ?本設(shè)計(jì)在完成基本要求方面,精度基本上達(dá)到了要求,由于受電動(dòng)車本身的性能所限,我們很難實(shí)現(xiàn)對(duì)其方向的精確控制,因此只完成了題目的基本要求。
參考文獻(xiàn)
[1]胡健主編.單片機(jī)原理及接口技術(shù)實(shí)踐教程???? 北京.機(jī)械工業(yè)出版社,2004
[2]何書森主編. 實(shí)用電子線路設(shè)計(jì)速成??????????? 福建.科學(xué)出版社,2004
[4]張偉主編. Protel99se基礎(chǔ)教程????????????? 北京.人民郵電出版社,2006
[5]童詩白.模擬電子技術(shù)基礎(chǔ)?????????????? ?北京.高等教育出版社,2001
[6]鄒伯白.自動(dòng)控制理論??????????????????? 北京.機(jī)械工業(yè)出版社,2002
[7]張洪潤(rùn).傳感器應(yīng)用電路200例???????????? 北京航空航天出版社, 2006
[8]顧繩谷.電機(jī)及拖動(dòng)基礎(chǔ)????????????????? 北京.機(jī)械工業(yè)出版社,2003