可穿戴型下肢助力機器人是輔助型康復機器人的一種,是一種幫助人們擴展下肢運動能力的助力裝置。##機器人感知模塊。##傳感器標定實驗。
2014-07-25 17:51:06 1976
1976 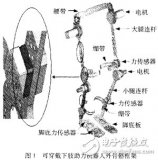
近幾年,可穿戴設備市場非常火熱,人們一致看好可穿戴設備市場。最近Apple Watch的熱銷,讓人們對可穿戴設備的前景更加充滿信心。可穿戴設備種類有很多,并且在不斷延伸,主要分為:應用類,如數字體溫計和血氧儀等;健康類,如運動手環等;娛樂類,如智能手表和智能眼鏡等。圖1可穿戴設備分類
2019-07-10 06:37:37
有沒有機器人比較全的資料
2017-03-21 12:35:21
請各位大神指導,移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉移的?
2016-07-26 13:33:14
機器人運動控制技術,盡管運動控制器需求增長迅速,但即便到明年,整體市場規模仍不到 10 億元。高性能工業機器人作為核心裝備,一直被國外品牌壟斷,而運動控制器的自主可控一直是國產機器人領域的一大痛點
2021-07-28 07:33:29
傳感器網絡與移動機器人控制新版機器人技術手冊智能足球機器人系統多足步行機器人運動規劃與控制基于16/32位DSP機器人控制系統設計與實現仿人多指靈巧手及其操作控制機器人技術基礎機器人機構學的數學
2015-02-22 07:34:56
,就能依靠經驗,學習到很多更好的作業方法,并且熟練掌握。 機器人傳感器可分為機器人內部傳感器和機器人外部傳感器兩種。機器人內部傳感器的功能是測量運動學和動力學參數,其提供信息的目的是控制機器人按規定
2018-01-03 17:09:03
機器人的運動原理還是屬于最基本的簡單機械。機器人運動主要是依靠什么裝置?有些什么裝置是機器人用的比較多的?
2015-02-03 11:22:01
及應用機器人技術基礎(熊有倫)(此書比較早) 2.運動規劃書籍:Principles of Robot Motion Theory, Algorithms
2019-05-22 06:53:10
模型要具備齒輪,導軌幾種基本的運動原理。
要分辨基本圖形,視覺模型要能分辨圓形,方形和三角形。
有了這兩點,機器人就基本上能計算開模和注塑這種簡單的工作了。要替代人類的工作,還要進一步學習。
2023-05-19 20:40:25
想弄一個vi可以動態顯示機器人的姿態,但不知道有什么函數可以引入機器人的模型,幫幫忙,謝謝。
2012-02-11 17:25:22
函數非常多,主要涉及到機器人建模、正運動學、逆運動學、動力學、逆動力學、雅克比、軌跡規劃等。對于機器人建模,用到最重要的兩個函數就是Link和Seriallink函數(1)Link 類Link包含了與機器人連桿相關的所有信息,例如運動學參數、剛體慣性參數、電機和傳送參數等。使用方法:A :關
2021-09-15 09:04:23
。.??有些品質是機器人應該遵循的,它應該有一個大腦(存儲器或控制器)它應該有一個 ARM。(顯然是用來裝東西的)它應該有一個運動的驅動機制。(像自由度,運動和其他)它應該有一個末端執行器。(手指狀
2022-03-31 10:31:31
機器人有哪些類型?
2021-06-18 06:41:57
【leetcode 66題 之 13 機器人的運動范圍】
2020-06-01 16:48:06
。 1、自由度 機器人具有的獨立坐標軸運動的數目。機器人的自由度是指確定機器人手部在空間的位置和姿態時所需要的獨立運動參數的數目。手指的開、合,以及手指關節的自由度一般不包括在內。.機器人的自由度
2017-08-15 14:00:52
機器人的優缺點有哪些?機器人是由哪些部分組成的?
2021-10-11 07:51:29
機器人的定義是什么?機器人優點和缺點是什么?機器人是由哪些部分組成的?工業機器人的應用有哪些?
2021-07-05 06:48:21
描述機器人相撲板機器人相撲,或 pepe-sumo,是一項運動,其中兩個機器人試圖將彼此推出一個圓圈(以類似于相撲運動的方式)。本次比賽使用的機器人被稱為相撲機器人。PCB
2022-08-30 07:17:29
機器人的移動通常是從管理機器人總體任務進度的中央處理器發出位置變化請求時開始的。導航系統通過制定行程計劃或軌跡以開始執行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關的任務目標。
2019-09-10 10:44:32
目前產業機器人僅能在嚴格定義的結構化環境中執行預定指令動作,缺乏對環境的感知與應變能力,這極大地限制了機器人的應用。利用機器人的視覺控制,不需要預先對產業機器人的運動軌跡進行示教或離線編程,可節約
2015-01-23 15:02:27
有人會用labview調用python嗎,或者有其他方法能實現這個要求?我在labview做了一個磁場發生的程序,驅動磁機器人運動,而且我這個機器人是繞著一個向量旋轉向前的,就輸入幅值頻率那些就可以
2022-11-18 16:21:25
用于 IMU 模塊、藍牙模塊甚至 IR 傳感器陣列的專用插槽,以制造機器人自主性。機身由激光切割的 3 毫米亞克力板制成,也可以 3D 打印。它是愛好者探索 機器人逆向運動學的絕佳項目。我在
2022-08-09 06:30:29
過程中,DeX-Platform采集運動學數據,根據內置函數實時計算出力矩補償值,使得機器人拖動自如。圖3顯示了拖動過程中某一關節的力矩補償曲線。拖動過程中,DeX-Platform提供實時記錄各關節軌跡
2018-03-02 14:42:06
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。LabVIEW作為一個關鍵技術,在項目中扮演了核心角色
2023-12-21 20:03:18
本書系統地介紹了工業機器人的基本組成、機械機構、運動學及動力學、控制系統、編程與調試、典型應用、管理與維護等內容。全書共7章,第1章介紹了工業機器人的發展與應用、機器人的組成與分類;第2章介紹了工業
2022-10-16 21:21:57
自動或半自動機器人常常需要嵌入式控制系統,從而能夠結合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執行器上。NI提供了多種嵌入式硬件平臺,以滿足復雜系統的需求。從尖端的機器人研究項目直至高級行業應用,NI平臺被證實是高效的機器人解決方案。
2019-11-06 07:50:49
最近要學labview里的機器人模塊,但是找不到什么入門資料,大家有沒有啥資料推薦推薦的啊。。。
2012-11-08 21:47:14
labview接收運動的巡檢機器人采集回來的數據,距離比較長,感覺用藍牙不太好,求助
2015-05-19 14:45:49
機器人在之前的機器人的基礎上,加入了可以自由便捷的運動功能,兩個攝像頭精準拍攝、全方位的視覺功能,還有一個超聲傳感器功能。傳感器可以識別人類和NAO機器人的接觸,從而做些動作和人類互動,所以說NAO機器人機器人真的可以讓我們體驗到智能的時代。
2015-02-13 15:43:24
1、fsolve/solve 求解scara機器人運動學反解:在機器人可達空間內自己給出一個直線的末端恒姿態的運動軌跡,求解各個關節的轉角;2、用Matlab表達出各個轉角運動曲線;順利求出函數了,可是運行fsolve語句一直報錯,但是不知道問題出在哪里極度暴躁,有沒有好心的大佬幫我看看吖~
2021-06-29 22:29:11
完善這個作品。主要運用的算法1、D-H參數模型2、三軸姿態解算3、六次項足跡規劃4、步態規劃5、平臺姿態解算即18軸加平面軸解算(未完成)知識點1、運動學2、機器人學3、數學基礎知識(矩陣、三角函數、坐標系
2014-03-27 18:51:05
,對工業機器人的運動學、動力學、基本控制系統等傳統內容的介紹比較簡潔,對機器視覺、機器聽覺和移動機器人的自主定位等新技術介紹較多,并以可重現的若干實例對相應技術和方法進行了驗證,相關程序代碼附在書中,重點
2016-06-01 13:12:46
集中于串聯式的工業機器人的理論與工程應用。雖然串聯機器人具有諸多優點,但同時也有些問題函待解決。本文介紹了一種新型的串并聯噴涂機器人的結構設計,并對其運動學、誤差建模、誤差補償和軌跡規劃進行了分析
2017-07-13 16:03:16
6章)介紹其基本運動控制模式及其導航和定位方法;第三部分“臂型機器人”(第7章至第9章)介紹其運動學、動力學和控制方面的知識;第四部分“計算機視覺”(第10章至第14章)包括光照與色彩,圖像形成和處理
2018-01-17 17:38:11
6章)介紹其基本運動控制模式及其導航和定位方法;第三部分“臂型機器人”(第7章至第9章)介紹其運動學、動力學和控制方面的知識;第四部分“計算機視覺”(第10章至第14章)包括光照與色彩,圖像形成和處理
2018-04-08 18:19:42
智能機器人項目實戰(免費)本課程著眼于實際應用,循序漸進的進行機器人實戰;并在實戰中提升基礎能力,從結構設計基礎、三維設計軟件的應用、運動學和動力學仿真、C語言基礎、單片機的應用、嵌入式開發、高級
2014-02-23 14:42:46
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-10-11 09:38:12
工業機器人有3~6個運動自由度,其中腕部通常有1~3個運動自由度;驅動系統包括動力裝置和傳動機構,用以使執行機構產生相應的動作;控制系統是按照輸入的程序對驅動系統和執行機構發出指令信號,并進行控制。工業
2015-01-19 10:58:38
算法構建機器人 的運動步態,之后運用六次軌跡規劃算法模擬出六足動物的抬腿擺動軌跡,最后 經由運動學的求逆,運算出每個關節的旋轉角,進而模擬出六足動物的運動步態。
2020-10-13 09:13:11
《先進機器人控制》從控制的角度系統地介紹了機器人學的基礎知識和當前的發展狀況。全書共分為12章,由基礎篇、控制結構篇和先進控制篇構成。基礎篇著重介紹串聯關節機器人的運動學、運動規劃和動力學。其中
2017-09-19 15:30:57
全向輪機器人是如何進行直線運動的?
2021-10-29 07:09:14
系統的管理、通訊、運動學和動力學計算,并向下級微機發送指令信息;作為下級從機,各關節分別對應一個CPU,進行插補運算和伺服控制處理,實現給定的運動,并向主機反饋信息。根據作業任務要求的不同,機器人的控制方式又可分為點位控制、連續軌跡控制和力控制。`
2017-08-09 16:30:09
可穿戴型下肢助力機器人是輔助型康復機器人的一種,是一種幫助人們擴展下肢運動能力的助力裝置,其基本原理是在基于人體運動行為意識信息的基礎上,由安裝在腿部關節(髖關節及膝關節)處的伺服電機驅動關節運動
2020-04-27 08:04:05
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-07-05 07:08:47
工業機器人的四大特征是哪些?工業機器人是由哪些部分組成的?工業機器人是怎樣進行劃分的?
2021-10-11 09:10:17
分析實例七、軟體手柔性抓取控制與實驗Matlab與機器人的通訊方法設計機器人逆運動學求解視覺處理方法設計八、剛柔軟機器人變剛度方法與控制離散型剛性關節變剛度方法軟體機器人變剛度方法變剛度軟體機械手的位移
2021-09-02 11:17:25
`華南機器人應用培訓中心擁有各種設備,開展各種不同的機器人培訓班。打造各種工業現場常見的機器人工作站,現開展KUKA、發那科、三菱、ABB、愛普生工業機器人培訓對外招生。 一、認識機器人技術:工業
2015-09-02 14:03:18
目的 本文手把手教你在 Mathematica 科學計算軟件中搭建機器人的仿真環境,具體包括以下內容: 1 導入機械臂的三維模型 2 正\逆運動學仿真 3 碰撞檢測 4 軌跡規劃 5 正\逆動力學仿真 6 運動控制 文中的代碼和模型文件點擊此處下載,
2021-09-07 07:38:54
研究的前沿,它在一定程度上代表了一個國家的高科技發展水平。運動控制系統是機器人控制技術的核心,也是機器人研究領域的關鍵技術之一,在機器人控制中具有舉足輕重的地位,因此,各研究機構都把對機器人運動控制系統的研究作為首要任務。
2020-08-19 06:57:09
目前,全方位移動機器人由于具有出色的靈活性,已經成為RoboCup中型組足球機器人比賽中最理想的選擇。而機器人的運動控制一直以來都是直接影響機器人性能的主要因素,也是移動機器人研究的熱點之一。本文
2019-10-22 07:35:19
制造出像人一樣具有智能的能替代人類勞動的機器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機器人的研究中,具有視覺的機器人的研究也就成了第一位的。對機器人視覺伺服系統的研究是機器人領域中的重要內容之一,其研究成果可應用在機器人自動避障、軌跡跟蹤和運動目標跟蹤等問題中。
2019-09-27 08:07:35
工業生產中,傳統的工業機器人在生產適用性上已經不能滿足日益增長的多任務需求,多軸機器人順勢發展,趨勢明顯。多軸機器人是能夠實現自動控制的、可重復編程的、多自由度的、運動自由度建成空間直角關系
2020-07-29 06:57:04
我想用arduino做一個機器人。源碼不知道,去哪找。還有應該看那些參考書籍。各位前輩有什么好的建議嗎?
2016-05-15 22:32:50
依賴進口。目前國內伺服電機領域的領先企業包括匯川技術、廣州數控、華中數控(300161,診股)、埃斯頓等。控制器控制器是機器人的大腦,主要負責發布和傳遞動作指令。控制器的主要任務是對機器人的正向運動學
2017-08-23 15:10:27
機器人技術是綜合了計算機、控制論、機構學、信息和傳感技術、人工智能、仿生學等多學科而形成的高新技術,是當代研究十分活躍,應用日益廣泛的領域。機器人應用情況,是一個國家工業自動化水平的重要標志。
2020-03-27 09:03:30
工業機器人一般由主構架(手臂)、手腕、驅動系統、測量系統、控制器及傳感器等組成。 1圖是工業機器人的典型結構。機器人手臂具有3個自由度(運動坐標軸),機器人作業空間由手臂運動范圍決定。手腕是機器人
2015-01-19 10:36:12
、機器人專用語言、機器人運動學、動力學軟件、機器人控制軟件、機器人自診斷、白保護功能軟件等,它處理機器人工作過程中的全部信息和控制其全部動作。示教系統是機器人與人的交互接口,在示教過程中它將控制機器人
2017-12-15 10:25:19
`<span style="" >工業機器人的技術原理機器人是綜合了計算機、控制論、機構學、信息和傳感技術、人工智能、仿生學等多學科而
2018-11-23 10:40:38
的作用。 根據工業機器人的發展趨勢,本書在編寫內容上略有偏重。對工業機器人的運動學、動力學、基本控制系統等傳統內容的介紹比較簡潔;對機器視覺、機器聽覺和移動機器人的自主定位等新技術介紹較多,并以可重現
2015-02-03 10:51:09
目的 本文手把手教你在 Mathematica 軟件中搭建機器人的仿真環境,具體包括以下內容(所使用的版本是Mathematica 11.1,更早的版本可能缺少某些函數,所以請使用最新版。。 1 導入機械臂的三維模型 2 (正/逆)運動學仿真 3 碰撞檢測 4 軌跡規劃 5 (正/逆...
2021-09-07 07:05:19
減小伺服電機共振的方法是什么?怎樣消除機器人運動產生的異響從而保持伺服的精度呢?
2021-09-27 08:30:04
關于ros智能機器人,就是一個寫智能機器人代碼的一個虛擬機,
2021-10-13 19:20:16
市場寵兒,深圳市可穿戴產業年產值已超10億元,涉及企業近500家。其中寶安區就有200多家企業從事可穿戴設備生產和制造,產值占到了深圳60%以上。此外深圳市從事機器人研發和生產的企業近300家,包括
2017-06-09 17:32:37
; 4.安卓手機控制設計; 5.火災、煤氣泄漏檢測及GSM報警系統;理論依據:1.傳感器在物聯網中的應用; 2.短距離無線信號定位; 3.向量空間理論與機器人運動學; 4.人工智能與機器視覺;技術指標
2015-12-02 19:08:42
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-06-30 06:37:34
機械臂運動學模型的知識點匯總,絕對實用
2022-01-20 06:53:26
機器人前沿--下肢外骨骼機器人
2019-04-28 06:56:09
麥克納姆輪的運動學和運動控制各輪的轉動和移動機器人整體運動的關系開環運動控制麥克納姆輪的運動學各輪的轉動和移動機器人整體運動的關系L是車身半長,w是車中線到輪子中線的距離,r是輪子和輪轂的角度;麥輪
2021-08-30 08:06:08
差速機器人的純軌跡跟蹤仿真(Matlab)剛入門,有的地方不對,煩請大家指正。目錄差速機器人的純軌跡跟蹤仿真(Matlab)1 差速機器人運動模型1.1 運動學分析建模1.2 差速機器人的運動
2021-09-01 08:11:00
什么是激光SLAM?激光SLAM技術在機器人運動控制系統中的應用是什么?
2021-07-30 06:37:25
好,而對復雜的任務要到現場雙方共同分析和制定任務描述,給出具體公道的要求。 下面是主要的數據和信息: 機器人的工作任務, 手抓和負載的總重量, 一個完整的工作周期是多少秒,可能分解成的子運動
2017-08-16 11:31:54
構建機器人 | 制作移動機器人 | 構建第一個機器人 | 機器人電子 | 機器人控制器 | 機器人傳感器 | 交互機器人選擇運動系統讓我們快速瀏覽一下用于移動機器人的三種主要運動系統。 如果比較表中
2021-09-01 08:12:28
我是新人,求幫助啊,明天需要提交輪式機器人應用的報告,求大神給點建議,可用輪式機器人應用于那些方面,要求實際可行,應用于生活,農業,軍事都可以,謝謝啦
2013-04-17 16:32:16
通過視覺傳感器獲取互動表演者的手臂姿態,揮動雙手臂模仿表演者的動作,實現對機器人的仿生模擬控制。邯鄲學舞機器人由一個視覺傳感器、兩個三自由度手臂、機器人身體和視覺處理控制器等組成;該機器人通過視覺傳感器獲取互動表演者的手臂姿態,揮動雙手臂模仿表演者的動作,實現對機器人的仿生模擬控制。
2016-03-28 11:42:25
江智黨建機器人是經過多年的市場沉淀 ;現已可以提供系統 全方位的黨建機器人服務
2022-06-21 07:59:59
基于MATLAB的機器人運動仿真研究:按照一定的要求對一種柱面坐標機器人進行了參數設計,討論了該機器人的運動學問題,然后在MATLAB 環境下,用Robotics Toolbox 對該機器人的正運動學、逆
2009-12-29 23:53:26 128
128 主要研究了基于新型正交六自由度并聯機構設計的仿生型機器馬系統的運動學特性。首先分析了機器人的逆運動學方程,然后設計了模糊自適應PID 控制器,最后給出了動平臺做一
2009-12-31 15:50:339 邁步機器人BEAR-H系列是用于輔助腦卒中患者步態康復訓練的新型可穿戴式下肢外骨骼機器人。機器人擁有主動被動訓練模式,通過對患者髖、膝、踝關節提供助力完成行走訓練,可以節省人力,并提高康復效果
2023-09-20 17:25:48
下肢外骨骼康復機器人BEAR-A1利用仿生學、人體工學、機器人技術,為下肢運動功能障礙者提供康復訓練。通過對患者髖、膝關節提供助力完成康復訓練,可以有效降低治療師工作強度,提高康復訓練效率,提高患者
2023-09-20 17:31:33
邁步手部康復外骨骼機器人,機器人可以帶動手指完成兩種康復運動——雙向彎曲運動和內收外展運動。機器人可適應不同患者的手指尺寸,外骨骼手的長度可調節,長時間佩戴不會使患者產生疲勞感。手部康復外骨骼機器人
2023-09-20 17:38:02
工業機器人運動學-1數學基礎 基于運算基礎相關的合理計算。
2016-02-25 18:12:556 《移動機器人原理與設計》第三章運動學 移動機器人會大規模的應用于生產實踐中
2016-05-30 15:08:130 混合式繩驅動機器人的運動學分析及其運動,仿真實驗。
2016-05-31 13:53:247 機器人運正逆運動學數學分析
2016-12-12 14:42:050 仿人機器人混聯靈巧手臂設計及運動學逆解研究_秦利
2017-01-08 11:20:200 新型仿生六足機器人步行足運動學分析與研究
2017-10-17 14:22:3125 弧焊機器人作為一種典型的6自由度串聯機器人,在汽車等行業中發揮著越來越重要的作用。本文以一款自主研發的弧焊機器人為實例,建立D-H坐標系,進行機器人的運動學分析,并在此基礎上完成機器人笛卡爾空間
2018-01-09 18:47:142 為了獲得Dobot機器人的正逆解計算公式、避免解被丟失的可能性和保證角的精度,根據該型機器人的結構特點,運用D-H法建立了機器人的坐標系和運動學方程,進行了正逆運動學的分析,將雙變量反正切函數應用到
2018-03-14 15:00:5315 可穿戴型下肢助力機器人是輔助型康復機器人的一種,是一種幫助人們擴展下肢運動能力的助力裝置,其基本原理是在基于人體運動行為意識信息的基礎上,由安裝在腿部關節(髖關節及膝關節)處的伺服電機驅動關節運動
2018-10-07 09:07:008551 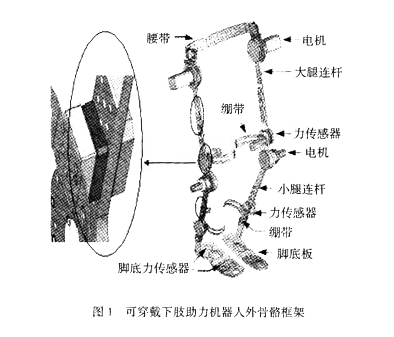
據報道,LG電子正致力于擴大在機器人領域的布局,計劃在8月31日首次公開可以支持人體下肢肌肉力量的“LG CLOi SuitBot”可穿戴機器人。
2018-09-12 09:52:48961 電子發燒友網站提供《Delta機器人的正向和反向運動學庫.zip》資料免費下載
2022-12-19 10:24:250 邁步下肢外骨骼康復訓練機器人BEAR-H1是一款輔助腦卒中患者用于步態康復訓練的新型可穿戴式下肢外骨骼機器人。憑借出色的設計和創新的概念,該產品榮獲2018年德國紅點概念設計大獎。
2023-08-30 14:17:44414 機器人運動學中的運動學約束是指機器人在運動過程中受到的限制,包括位置、姿態、速度和加速度等因素。這些約束會對機器人的自由度產生影響,從而影響機器人的運動和控制。運動學約束通常用數學模型來描述,為機器人的運動控制提供了理論基礎。
2024-01-18 16:45:24334 
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論