 對可穿戴型下肢助力機器人的分析與研究
對可穿戴型下肢助力機器人的分析與研究
引言
可穿戴型下肢助力機器人是輔助型康復機器人的一種,是一種幫助人們擴展下肢運動能力的助力裝置,其基本原理是在基于人體運動行為意識信息的基礎上,由安裝在腿部關節(髖關節及膝關節)處的伺服電機驅動關節運動,通過各關節角度、速度值的改變來達到與人體腿部的協調運動并提供助力,降低人在負重或長時間行走情況下的運動強度,對那些有異樣運動行為的人提供治療和矯形,與人體組成了一個協調而且完美的整體。目前,世界上大約有10余家實驗室從事可穿戴型人體助力機器人的研究,其中日本和美國走在前列,國內尚未見相關報道。日本筑波大學(Tsukuba University)在2002年研制開發了機器人裝混合助力腿(hyhrid assis-tive limb,HAL),機械外骨骼綁縛在人腿的兩側,利用貼在腿部皮膚上的EMG傳感器檢測肌肉的電流,控制電動馬達驅動機械外骨骼運動以輔助腿部的動作。美國加州大學伯克利分校機器人和人體工程實驗室研制出美軍“伯克利下肢外骨骼”(Berkeley lower extremity exoskeleton, BLE-EX),由背包式外架、金屬腿及相應的液壓驅動設備組成,機械系統采用了與類人形結構相似的設計,背包式外架能夠使操縱者攜帶一定載荷,其有效作用力不經過穿戴者而直接經由外骨骼傳至地面。下肢外骨骼能夠攜帶外部負載和自身的重量(包括操縱者的重量)在崎嶇路面遠距離行走,能使帶有全副武裝的士兵增強負重能力和提高行軍速度。然而上述裝置存在著共同的缺點,由于肌電傳感器是根據肌肉活動時皮膚表面傳送的微弱電流信號或肌肉的軟硬程度來推斷人的行為意識,導致所采用的大部分傳感器要與人體肌膚直接接觸并粘貼在肌膚上,需要特別的固定裝置,這樣直接導致穿戴上的不便;人體分泌的汗液、傳感器安裝的好壞等將影響所獲取信息的穩定與準確性,而且信息量大而復雜,易受干擾,從而使控制難度加大。因此,本文設計一種新型的可穿戴型下肢助力機器人感知系統,該系統用于獲取人體下肢和機器人外骨骼之間的接觸力,利用這些力信息和關節角度信息控制機器人外骨骼以實現對人體下肢運動的助力。
1 助力機器人系統
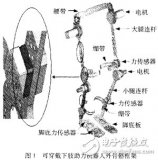
可穿戴型下肢助力機器人主要由機械、傳感和控制三大部分組成。機器人外骨架包含12個自由度,每只腿有6個自由度,髖關節包含3個自由度,膝關節、踝關節和腳底各包含1個自由度,該設計要求不僅符合以往的擬人機器人行走機構的設計要求,又達到與人體腿部運動相協調、互不產生運動干涉的設計要求,如圖1所示。
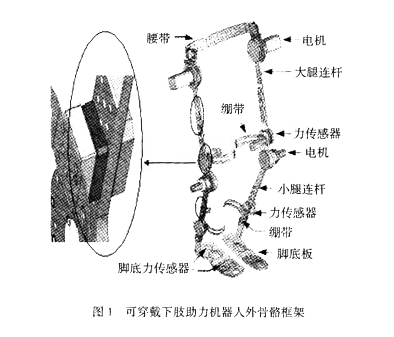
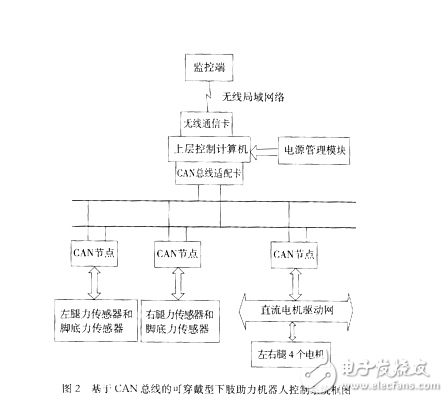
執行部分主要指直流伺服電機,該系統需要4個,它們分別固定在兩腿髖關節和膝關節上。可穿戴型下肢助力機器人控制系統主要采用PC104嵌入式控制系統板和PC104CAN卡,整個系統的控制結構見圖2。
2 機器人感知模塊
2.1 人機系統接觸信息
可穿戴型下肢助力機器人主要利用人體下肢運動信息提供助力,這些運動信息主要包括人體與外骨骼機器人的腿部接觸力信號、腳底力信號,膝關節和踝關節的角度信號等。為了獲取這些運動信息,設計一套基于CAN總線的多傳感器感知系統,解決了傳統的傳感器通信方式(主要是指RS-232和RS-485)中主節點單一和實時性差等問題。該系統由電機碼盤、安裝在腿部的2個二維力傳感器和安裝在腳底的6個一維力傳感器組成。腿部力傳感器固定在人腿膝關節和踝關節上部,用于測量人體與外骨骼之間的接觸力;腳底力傳感器安裝在腳尖和腳跟,用于測量地面反力;電機碼盤用于測量髖關節和膝關節轉動角度,如圖1所示。
2.2 系統設計
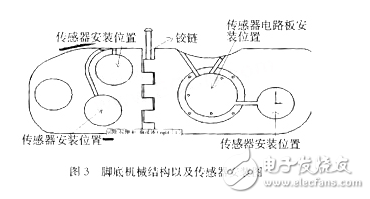
腿部二維力傳感器是用于測量機器人外骨骼和人體之間的接觸力大小的傳感器,其測量的準確性和穩定性對助力機器人的控制有重要的意義。腿部力傳感器主要是由2個二維力傳感器組成,用于測量人體大、小腿與機器人外骨骼之間的接觸力,該接觸力包括沿人體腿部的力(X方向)和垂直腿部的力(Y方向)。在下肢助力機器人的控制中,除了要知道人體腿部與機器人的作用力之外,還需要知道人體腳底對機器人的作用力,而腳部力傳感器是測量地面對人機系統的作用反力。人體落腳對地面的著力點可以用三個支撐點表示,這三個支撐點的位置分別位于第一跖骨根部和第五跖骨根部以及后腳跟,人體靠這三點間產生的足弓支撐身體,而身體的重量經由這三點傳遞到地面。為了準確獲取行走時腳底的力信息,腳底力傳感器的安裝位置就定在這三點的位置上,每只腳需要安裝3個一維力傳感器,共需要6個一維力傳感器,具體安裝位置見圖3。由于腳底機械部分的限制,傳感器彈性體體積比較小,其本體機械尺寸φ40 mm(直徑)×8 mm(厚度),量程為1000 N。
2.3 傳感器設計
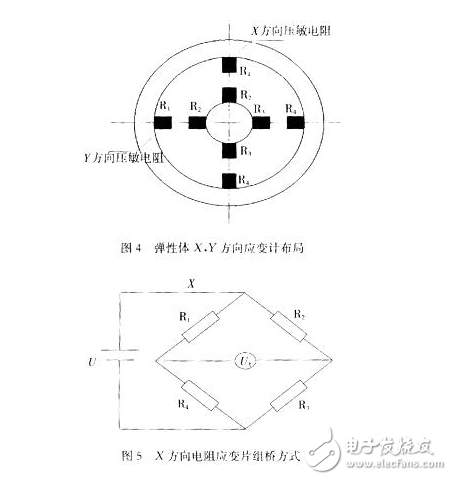
彈性體的設計是多維傳感器設計中的關鍵。本文在利用有限元分析方法對傳感器彈性體的靜態和動態特性仿真分析的基礎上,設計一種基于E型膜片的彈性體結構,這種結構的傳感器具有結構簡單、靈敏度高、維間耦合小、容易標定的特點。整個彈性體主要由彈性膜片、應變計和受力轉接體三個部分組成,彈性體由兩層E型膜片構成,實現X和Y兩個方向應變力的測量。彈性膜片為圓形結構,其直徑和厚度分別為φ15 mm和2 mm,厚度方向和測量方向一致。敏感元件采用箔式電阻應變片,應變片粘貼在E型膜片上。傳感器的輸出是E型膜片的應力,應力的測量方式很多,本研究采用箔式電阻應變片,應變片粘貼在E型膜片上,用于測量彈性體上應力的大小。應變計貼片位置如圖4所示,X和Y方向應變片安裝在E型膜片的下端,四片應變片電阻組成一個惠斯登全橋電路(如圖5所示),實現輸出信號的自動解耦。當力作用于傳感器時,由于力大小、方向的不同,各個方向的敏感電阻受到的應力不同,從而得到力與應變之間的關系。以X方向為例,E型膜片敏感彈性部分的圓環平膜片屬于薄板結構,在X向力的作用下,邊界條件比較簡單,可以等效為外圓周固定,集中應力作用在硬中心的圓形薄板。根據薄板理論可知,周邊固支具有硬中心的膜片在半徑r處的徑向應力εr和切向應力εθ為
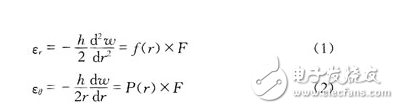
式中:ω,h分別為圓形膜片的法向位移和厚度;F為施加力的等效集中力;f(r),P(r)是僅與r有關的函數。
由上式可以看出,當半徑r一定,也就是壓敏電阻位置固定時,圓形膜片表面上的應變ε為
ε=kFF (3)
式中kF為應變系數常量。
由于使用等臂電橋,即R1=R2=R3=R4,有
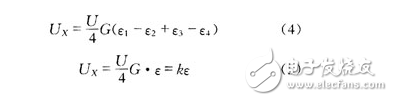
式中:ε1,ε2,ε3,ε4分別是4個敏感電阻R1,R2,R3,R4的應變;ε為圓形膜片的總應變;G,k為常量;UX是橋路輸出電壓。
綜合式(4),(5),橋路的輸出電壓信號正比于傳感器的力信號,測量輸出電壓信號就可以得到被測目標的力信號。
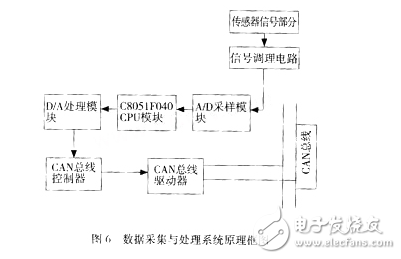
傳感器硬件電路采用嵌入式片上系統,由數字電路和模擬電路兩部分組成,其中模擬電路由信號調零電路、運算放大電路和模擬濾波電路組成;數字電路部分主要包括A/D采樣模塊、數字計算模塊、CAN總線控制器、CAN總線驅動器和必要的外圍電路模塊。圖6是助力機器人力傳知系統的數據采集與處理系統的硬件電路原理框圖。
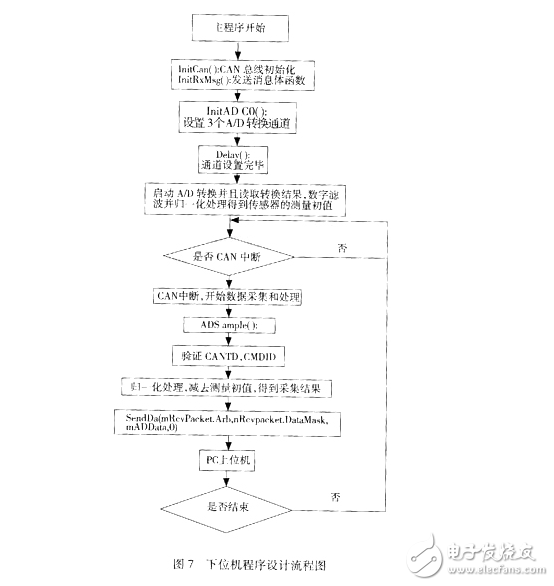
軟件設計分為下位機(微處理器)的軟件設計和上位機(PC)的軟件設計。每個傳感器作為一個節點通過CAN總線互聯,當接收到上位機的命令后,首先進行命令判斷,根據不同的命令作出相應的數據處理。上位機(PC)主要包括清零點、力信息(數字量)、回傳力信息、查詢力信息、屏蔽報警等命令。下位機的軟件設計主要由數據采集程序(A/D轉換)、數據處理程序以及CAN總線通訊程序三大部分組成。啟動CAN中斷以前,在主程序中進行一次數據采集,得到傳感器系統的初始值,這其中包括3個A/D轉換通道;延時,完成通道的初始化;數據采集是在CAN中斷程序中完成的,每一次中斷完成1組三維力信息數據的采集以及相應的A/D轉換;同時讀取轉換結果,對轉換結果進行數字處理,數字處理主要由數字濾波與力信息解耦兩大部分組成,數字濾波主要采用窗口移動法與數據平均值法相結合;數據經過解耦處理后,通過SendData()函數,將數據發送到CAN總線上,上位機通過ID號識別接受下位機數據,具體流程見圖7。
3 傳感器標定實驗
E型膜片元件結構的復雜性使得產品特性的一致性比一維傳感器更難保證,應變計的貼片工藝很難保證絕對理想情況,這些因素決定傳感器的實際靜態特性和理論計算值之間存在一定的誤差,因此傳感器的靜態特性一般采用標定實驗的方法獲取,其標定準確度將直接影響傳感器使用時的測量準確度。所謂傳感器的標定,就是建立傳感器的三路輸出值與作用在傳感器坐標系原點上的三維力之間的數量關系。標定實驗過程包括靜態標定和實時測量驗證兩部分。為了減少隨機誤差的影響,采用一種具有一定冗余力向量的最小二乘標定方法。設F是加載力矩陣,V為傳感器的輸出矩陣(數字量),C為標定矩陣,E為誤差矩陣,則
F=CV+E (6)
式中:F,V為已知量;E可以設定。于是,標定矩陣的求解可以轉化為求解標定矩陣C,使式(6)在最小二乘法意義下最優。在微型指力傳感器標定過程中,對施加在傳感器上X,Y方向的載荷和敏感橋路之間的關系進行測量,其測量值(數字量)與所加砝碼數值的對應關系如圖8所示(XLable表示傳感器標定所加載荷,Ylable表示傳感器輸出數字量)。
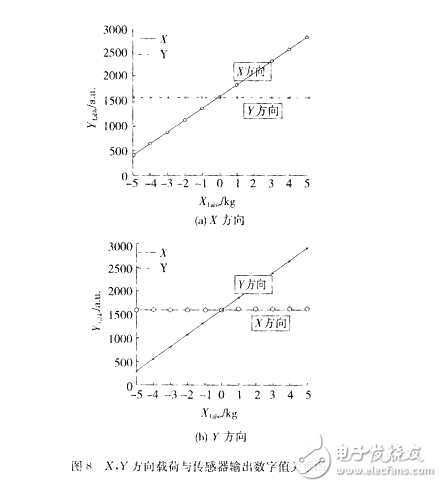
從圖8可以看出,傳感器X方向加力時,所受載荷和傳感器敏感橋路輸出之間的映射關系可以基本認為是線性的,Y方向的最大耦合不超過2.5%。利用最小二乘法得到傳感器的兩組靜態標定矩陣為由此可以計算出傳感器的I類誤差為2%,II類誤差為2.5%。利剛C1,C2兩組標定矩陣對傳感器進行實時測量檢驗,結果顯示I類最大誤差不超過2%,II類誤差不超過2.5%。通過該標定系統得到的靜態標定矩陣和理論設計值比較接近,說明標定系統和標定方案是切實可行的。
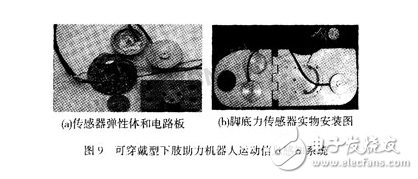
結 論
本文針對一種新型的人體輔助型康復機器人,設計了一套基于CAN總線的下肢運動信息感知系統,見圖9。經分析可穿戴型助力機器人所需要的控制信息可確定傳感器的種類、數量和安裝位置;重點介紹腿部和腳底力傳感器的彈性體設計,測量電路和上下位機軟件;對傳感器進行標定實驗并對數據進行分析,給出傳感器的一般性能指標,結果說明本研究中的設計理論和設計過程是正確的,基本可以滿足可穿戴型下肢助力機器人控制系統的需要。未來的工作主要集中在以下幾點:①繼續完善傳感器的彈性體結構,在滿足傳感器性能指標的基礎上進一步減小傳感器彈性體體積和精確確定應變計的貼片位置;②完善傳感器的測量電路設計,增加濾波電路,改進放大電路;③改進傳感器的標定系統,把標定誤差降至最低。
-
機器人
+關注
關注
211文章
28445瀏覽量
207205 -
康復機器人
+關注
關注
3文章
36瀏覽量
9100
發布評論請先 登錄
相關推薦
基于運動學原理的可穿戴下肢助力機器人
HERMES與可穿戴外骨骼機器人技術詳解
什么是工業機器人
功率放大器基于振動驅動的旋轉及攀爬軟體機器人的研究
基于TRIZ輪式機器人驅動輪的研究
LG電子將公開可以直接穿戴在身上的可穿戴機器人
LG電子公開可支持人體下肢肌肉力量的可穿戴機器人,助力布局機器人領域
LG對準機器人領域將公開可穿戴機器人
FRT是一家以開發的機器人技術為基礎 制造穿戴式機器人的初創企業
下肢外骨骼機器人的控制策略研究進展詳細說明





 工商網監
工商網監
評論