 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
?
在本教程中,我們將學習如何輕松編程 Otto DIY 機器人以使其行走。
。
第 1 步:您需要什么
?
- Otto Robot,您可以在此處購買或在此處查看有關如何通過幾個步驟構建它的說明。
- Visuino 程序:下載 Visuino
第 2 步:啟動 Visuino,并選擇 Arduino UNO Board Type
?
?
?

?
1 / 2
?
要開始對 Arduino 進行編程,您需要從此處安裝 Arduino IDE:https ://www.arduino.cc/ 。
請注意,Arduino IDE 1.6.6 中存在一些嚴重錯誤。確保您安裝的是 1.6.7 或更高版本,否則本教程將無法運行!如果您還沒有按照本教程中的步驟設置 Arduino IDE 來對 Arduino Nano 進行編程!Visuino:https ://www.visuino.eu也需要安裝。啟動Visuino,如第一張圖所示點擊Visuino中Arduino組件(圖1)上的“工具”按鈕出現對話框時,選擇“Arduino UNO”,如圖2所示
第 3 步:在 Visuino 中添加組件
?
?
?
?
1 / 4
?
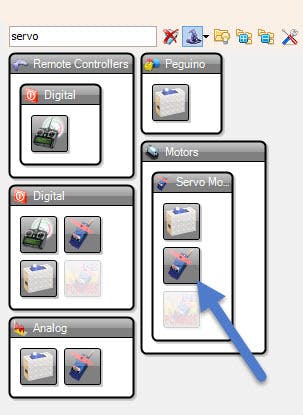
添加組件:
- 添加 2X“模擬值”組件
- 添加 2X“除以模擬值”組件
- 添加2X“正弦模擬發生器”組件
- 添加2X“伺服”組件
第 4 步:在 Visuino 設置組件中
?
?
?
?
1 / 5
?
- 選擇“AnalogValue1”組件并在屬性窗口中將“Value”設置為 20
- 選擇“AnalogValue2”組件并在屬性窗口中將“Value”設置為 20
- 選擇“DivideByValue1”組件并在屬性窗口中將“Value”設置為 180
- 選擇“DivideByValue2”組件并在屬性窗口中將“Value”設置為 180
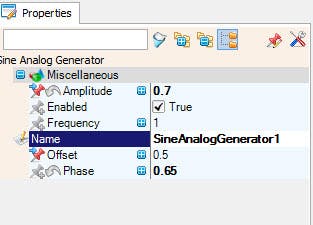
- 選擇“SineAnalogGenerator1”組件并在屬性窗口中將“相位”設置為 0.65,將“頻率”設置為 1,將“偏移”設置為 0.5
- 選擇“SineAnalogGenerator2”組件并在屬性窗口中將“相位”設置為 0.5,將“頻率”設置為 1,將“偏移”設置為 0.5
- 選擇“Servo1”并將名稱設置為“LR1”<<我們設置這個是為了便于理解。這意味著右腿
- 選擇“Servo2”并將名稱設置為“FR1”<<這意味著右腳
- 選擇“Servo3”并將名稱設置為“LL1”<<這意味著左腿
- 選擇“Servo4”并將名稱設置為“FL1”<<這意味著Foot Left
第 5 步:在 Visuino Connect 組件中
?
?
?
?
1 / 2
?
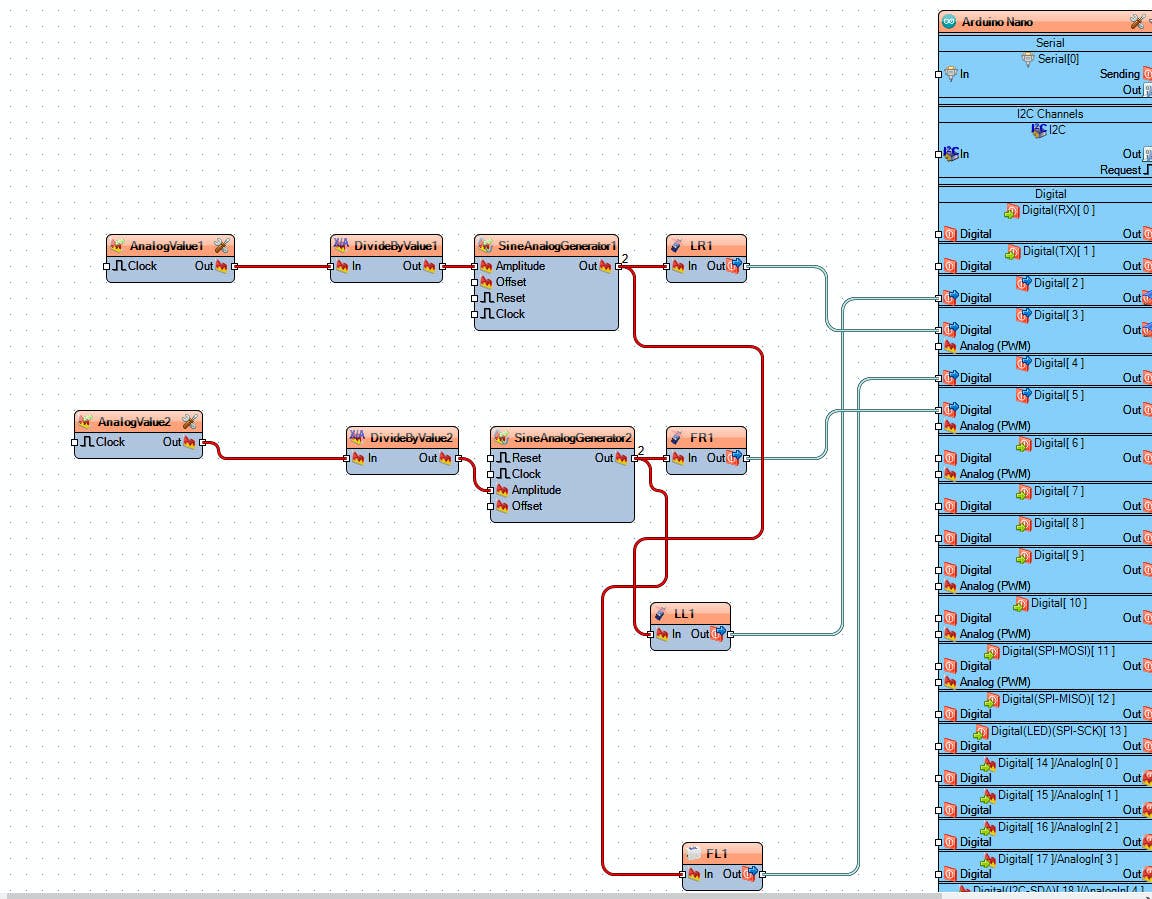
- 將“AnalogValue1”組件引腳 [Out] 連接到“DivideByValue1”組件引腳 [In]
- 將“AnalogValue2”組件引腳 [Out] 連接到“DivideByValue2”組件引腳 [In]
- 將“DivideByValue1”組件引腳 [Out] 連接到“SineAnalogGenerator1”引腳[Amplitude]
- 將“DivideByValue2”組件引腳 [Out] 連接到“SineAnalogGenerator2”引腳[Amplitude]
- 將“SineAnalogGenerator1”引腳[Out]連接到“LR1”組件引腳[In]和“LL1”組件引腳[In]
- 將“SineAnalogGenerator2”引腳[Out]連接到“FR1”組件引腳[In]和“FL1”組件引腳[In]
- 將“LR1”組件引腳 [Out] 連接到 Arduino 數字引腳 [3]
- 將“FR1”組件引腳 [Out] 連接到 Arduino 數字引腳 [5]
- 將“LL1”組件引腳 [Out] 連接到 Arduino 數字引腳 [2]
- 將“FL1”組件引腳 [Out] 連接到 Arduino 數字引腳 [4]
注意:請檢查 Arduino 引腳 [2,3,4,5] 是否與伺服電機護罩(腿和腳)上的連接相匹配,并在必要時進行更改。
第 6 步:生成、編譯和上傳 Arduino 代碼
?
?
?
?
1 / 3
?
在 Visuino 中,按 F9 或單擊圖 1 所示的按鈕生成 Arduino 代碼,然后打開 Arduino IDE
在 Arduino IDE 中:
- 點擊菜單“工具”并選擇板“Arduino Nano”(圖2)
- 單擊菜單“工具”并選擇端口
- 單擊菜單“工具”并選擇端口
- 點擊 Upload 按鈕,編譯并上傳代碼(圖 3)注意:如果您在上傳代碼時發現一些問題,您可以點擊 Menu Tools>Processor:..>ATMega328P (Old Bootloader)
第 7 步:播放
如果你給奧托機器人供電,它就會開始行走。
恭喜!您已經使用 Visuino 完成了 Otto 項目。還附上了我為本教程創建的 Visuino 項目,您可以在此處下載。您可以在 Visuino 中下載并打開它:https ://www.visuino.eu
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- Otto DIY Arduino藍牙機器人易于3D打印
- 如何在家制作蜘蛛行走機器人
- KUKA機器人編程 1次下載
- DIY Edge Avoider機器人
- Otto DIY ESP32盾牌
- 庫卡機器人有限公司培訓資料之庫卡機器人教程C2系統編程 9次下載
- 庫卡機器人有限公司培訓資料之庫卡機器人編程C4教程 10次下載
- 如何實現溫室內移動機器人自主行走的溫室道路邊緣檢測與導航算法 17次下載
- 如何使用CPGs實現雙足機器人的行走規劃與控制 24次下載
- 工業機器人的詳細資料和應用編程等培訓資料概述 38次下載
- 基于Scratch和ROS的教育機器人編程與實現 10次下載
- 雙足行走機器人步行原理是什么?步態軌跡規劃的詳細分析資料概述 102次下載
- DIY:簡簡單單自制平衡機器人 25次下載
- 基于DSP和模糊控制的尋線行走機器人設計
- 一種尋線行走機器人設計與實現
- 工業機器人的四種編程(示教編程、離線編程、自增強現實編程主編程)剖析! 2981次閱讀
- 機器人對TF電機要求有哪些 1388次閱讀
- 工業機器人編程入門_工業機器人的編程要求 9787次閱讀
- 焊接機器人編程好學嗎_前景怎么樣 1.6w次閱讀
- 常用的機器人編程方法有哪些 1.6w次閱讀
- 機器人底盤的主要三大技術 8212次閱讀
- 機器視覺的機器人取代四臺傳統的火焰處理機器人 3370次閱讀
- 機器人十大流行編程語言的介紹及機器人編程系統以及操作方法 4.2w次閱讀
- 淺析機器人離線編程軟件的優勢和主流編程軟件的功能及優缺點 1.3w次閱讀
- 甲殼蟲機器人diy制作詳解 3920次閱讀
- 電科大機器人研究中心研發出第四代外骨骼機器人 5077次閱讀
- 機器人離線編程與機器人編程趨勢 6243次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.5w次閱讀
- 焊接機器人編程入門與編程技巧介紹 8.6w次閱讀
- 對《工業機器人編程指令詳解》的詳細介紹 1.9w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論