 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
該項(xiàng)目的最終結(jié)果如下:
請(qǐng)注意,面包板僅用于將電阻器連接到 HC-SR04 傳感器的回波通道。只要使用 1.0 至 1.2 K-OHM 電阻器保護(hù) BeagleBone,您就可以從項(xiàng)目中完全移除面包板。
該項(xiàng)目的封面圖片顯示了添加到EduMIP平臺(tái)的超聲波 HC-SR04 傳感器。如果您的目標(biāo)只是讓距離傳感器與 BeagleBone Blue 配合使用,您可能希望完全跳過(guò)最后的 EduMIP 部分。如果您想將距離傳感器添加到現(xiàn)有的 BluPants 爪/抓爪機(jī)器人,請(qǐng)按照本教程“ BluPants 爪/抓爪機(jī)器人”部分的所有說(shuō)明進(jìn)行操作。
連接 HC-SR04 模塊
使用 6 針 JST 跳線并將其連接到 BeagleBone Blue 中的“GP0”插座。
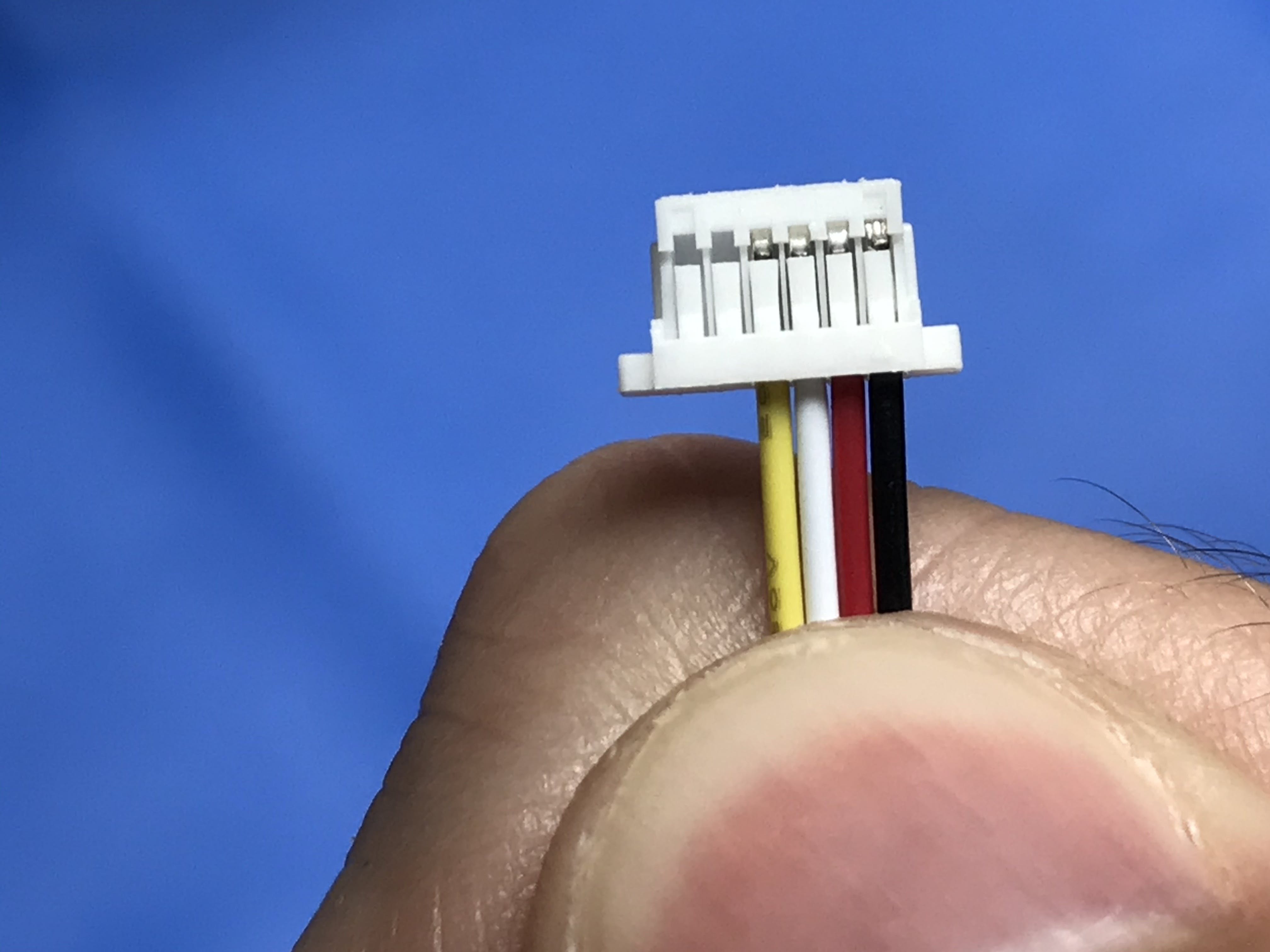
使用 4 針 JST 跳線并將其連接到 BeagleBone 中的“Power out”插座。
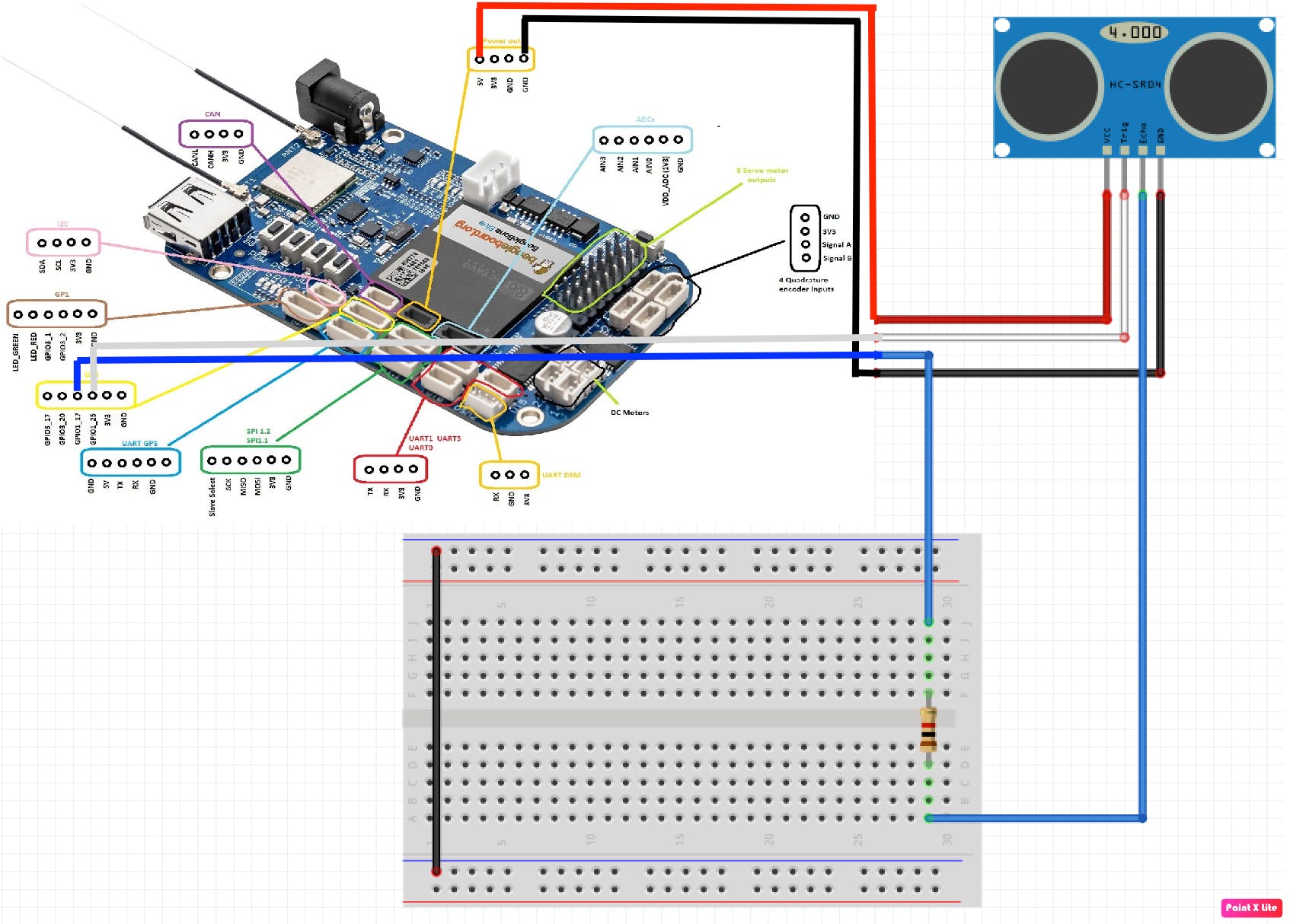
請(qǐng)?jiān)谙旅嬲业?BeagleBone Blue 引腳圖。嘗試識(shí)別板上的“GP0”和“Power out”連接器時(shí)可能會(huì)有所幫助:
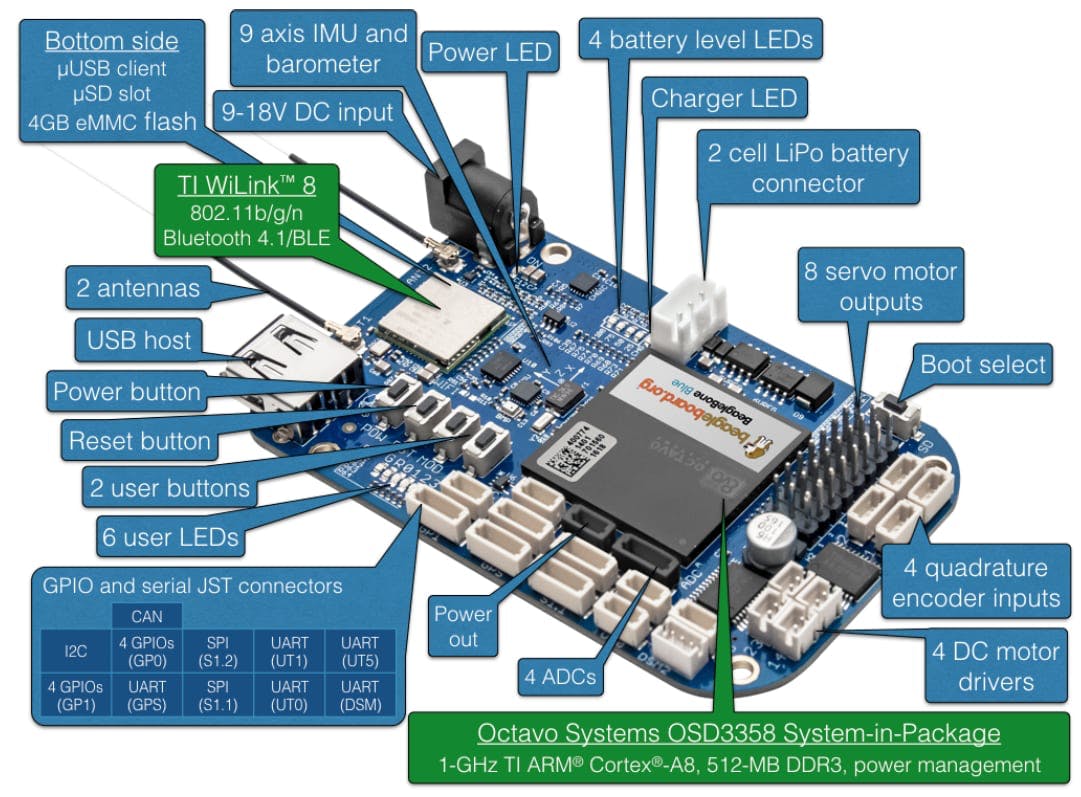
有關(guān) BeagleBone Blue 引腳排列的更多詳細(xì)信息,請(qǐng)參閱此鏈接:
https://groups.google.com/forum/#!category-topic/beagleboard/ZXSTPIcV4OU
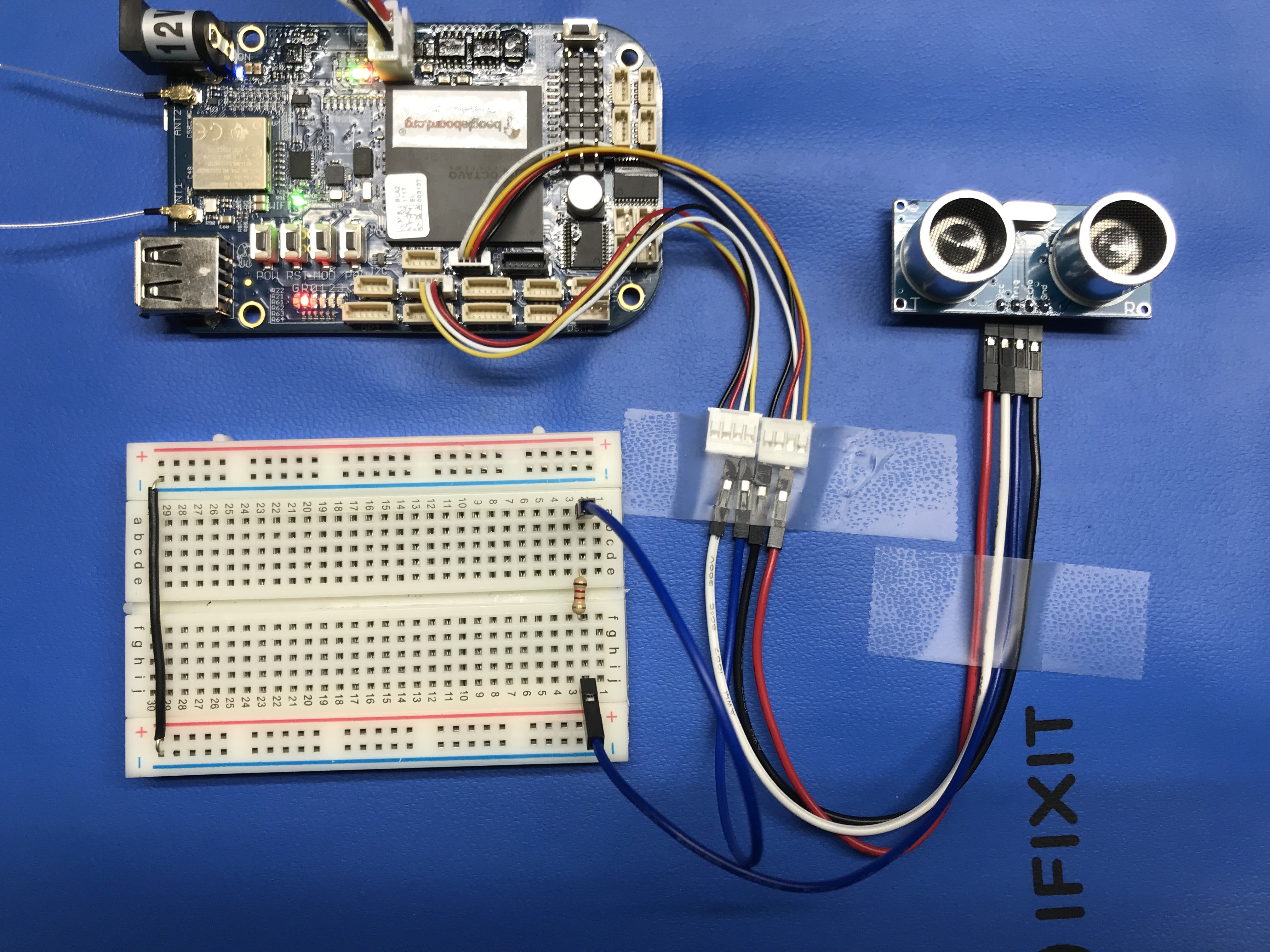
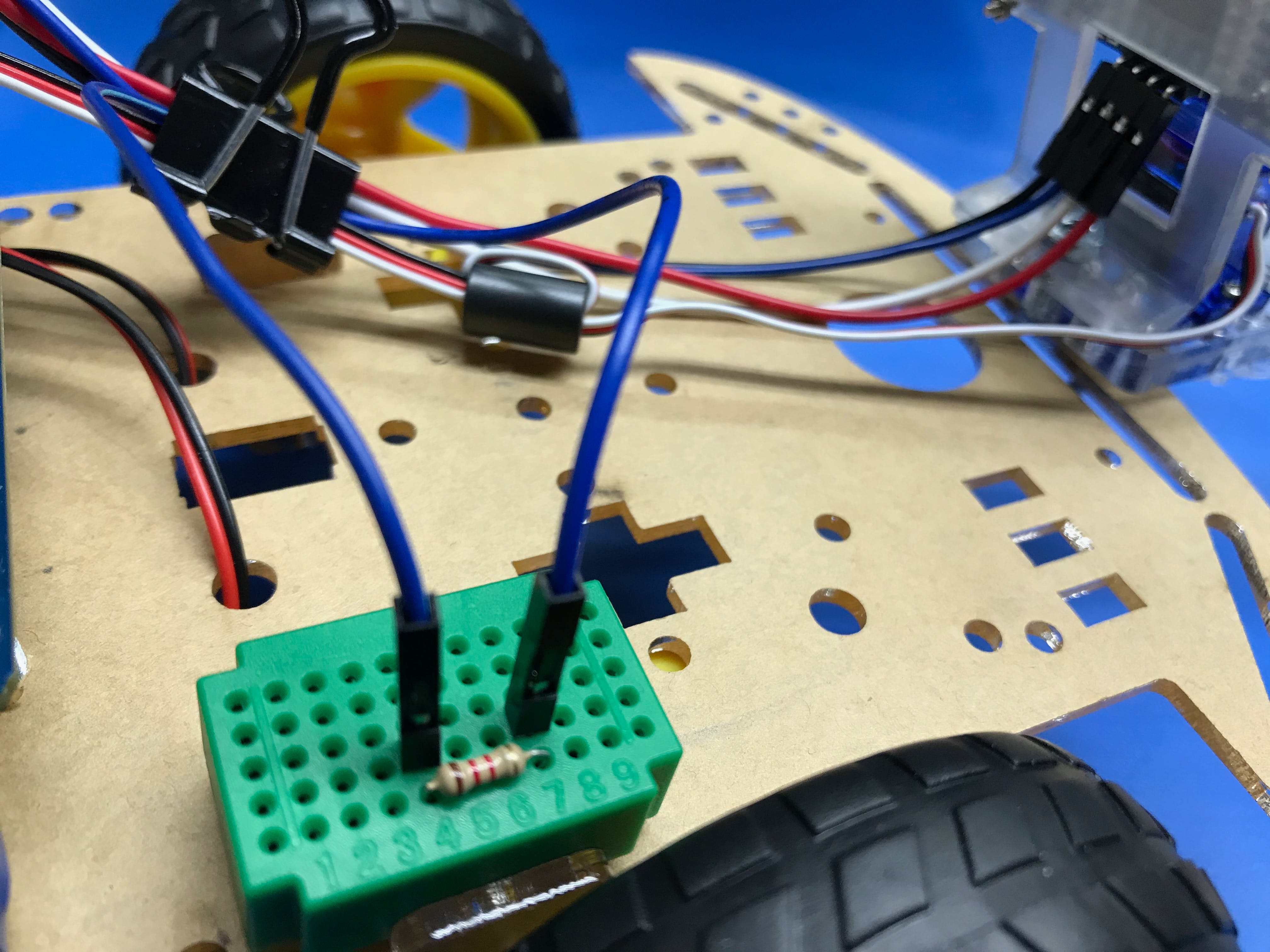
正確連接 JST 電纜后,使用一些跳線將 HC-SR04 連接到 JST 母連接器。確保為您的回聲跳線使用 1K-OHM 電阻(此項(xiàng)目的藍(lán)線)。如有必要,請(qǐng)使用面包板:
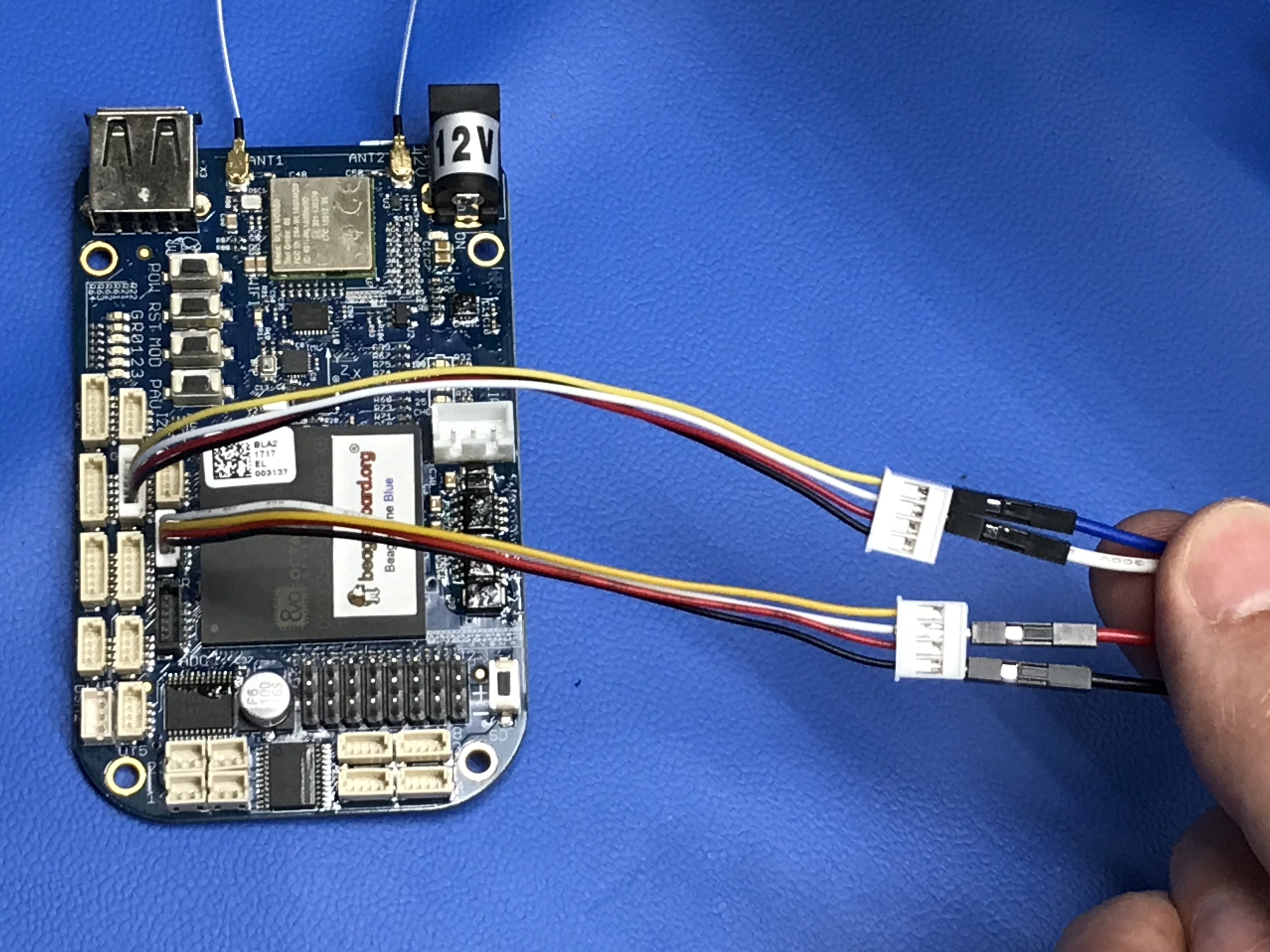
完成接線后,您的項(xiàng)目應(yīng)類似于下圖:
用 Python 測(cè)量距離
請(qǐng)?jiān)?Github 上找到示例 Python3 模塊hcsr04.py以測(cè)試您的項(xiàng)目:
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import Adafruit_BBIO.GPIO as GPIO
import time
# HC-SR04 connection
# red wire
vcc = "5V"
# white wire
trigger = "GPIO1_25"
# blue wire using resistor
echo = "P9_23" #echo = "GPIO1_17"
# black wire
gnd = "GND"
GPIO.cleanup()
time.sleep(2)
def distance_measurement(TRIG,ECHO):
GPIO.output(TRIG, True)
time.sleep(0.00001)
GPIO.output(TRIG, False)
pulseStart = time.time()
pulseEnd = time.time()
counter = 0
while GPIO.input(ECHO) == 0:
pulseStart = time.time()
counter += 1
while GPIO.input(ECHO) == 1:
pulseEnd = time.time()
pulseDuration = pulseEnd - pulseStart
distance = pulseDuration * 17150
distance = round(distance, 2)
return distance
# Configuration
print("trigger: [{}]".format(trigger))
GPIO.setup(trigger, GPIO.OUT) #Trigger
print("echo: [{}]".format(echo))
GPIO.setup(echo, GPIO.IN) #Echo
GPIO.output(trigger, False)
print("Setup completed!")
# Security
GPIO.output(trigger, False)
time.sleep(0.5)
distance = distance_measurement(trigger, echo)
while True:
print("Distance: [{}] cm.".format(distance))
time.sleep(2)
if distance <= 5:
print("Too close! Exiting...")
break
else:
distance = distance_measurement(trigger, echo)
GPIO.cleanup()
print("Done")
演示
hcsr04.py模塊將每 2 秒打印一次以厘米為單位的距離。如果物體離傳感器太近(5厘米或更小),它將中斷執(zhí)行并退出。
BluPants 爪/抓爪機(jī)器人
組裝機(jī)器人
我建議使用這兩個(gè)教程來(lái)組裝您的基礎(chǔ)抓手機(jī)器人,這樣您就可以將距離傳感器安裝在它的頂部:
準(zhǔn)備好基爪機(jī)器人后,您可以向其添加距離傳感器。你可以通過(guò)許多不同的方式來(lái)做到這一點(diǎn)。例如,您可以使用膠帶將其連接到爪式伺服系統(tǒng)(就像我們?yōu)?/font>Raspberry Pi 機(jī)器人所做的那樣),或者使用這樣的支架:
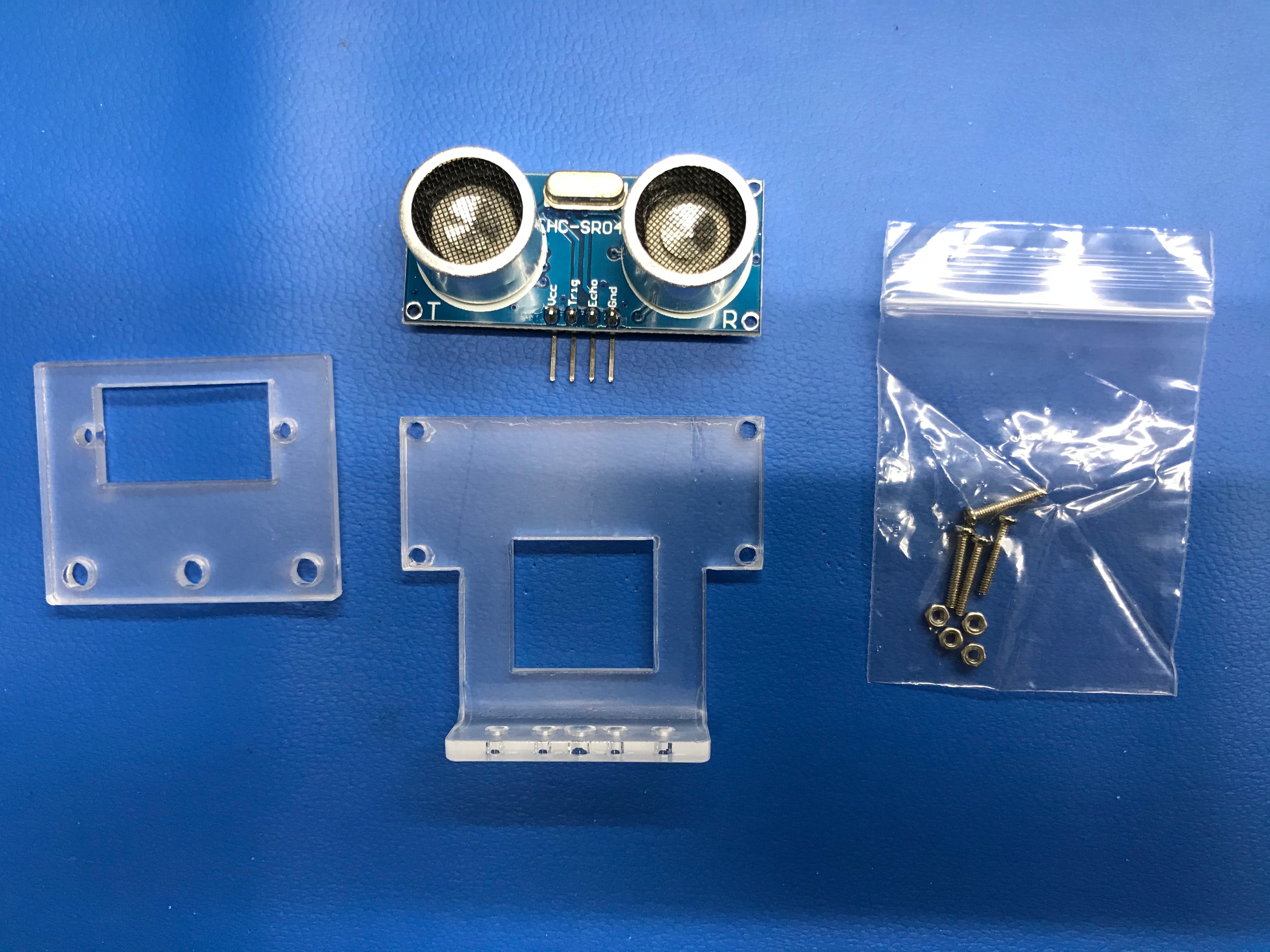
所示的 HC-SR04 傳感器固定在機(jī)器人的前部。未使用添加伺服器以平移傳感器的部分。如果您希望能夠平移距離傳感器,可以隨意添加它。
將 HC-SR04 連接到機(jī)器人后的最終結(jié)果應(yīng)該與此類似:
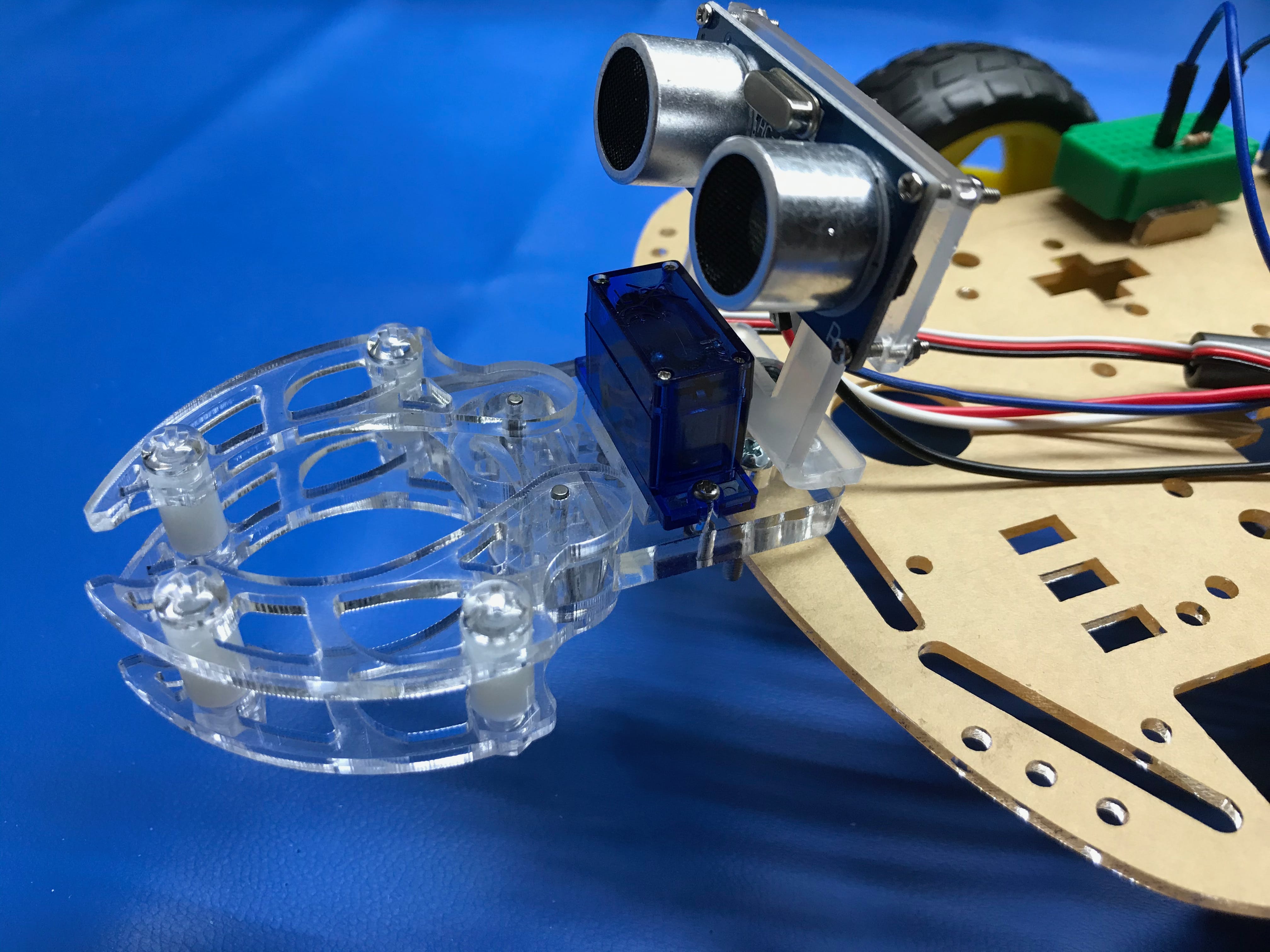
另一個(gè)建議是使用迷你面包板來(lái)節(jié)省機(jī)箱上的空間,以便將來(lái)可能要添加的附加組件。
將距離傳感器添加到 MVP 或爪式機(jī)器人后,您就可以使用BluPants Studio編寫一些代碼了。
EduMIP
組裝機(jī)器人
我強(qiáng)烈推薦使用這個(gè)很棒的教程來(lái)組裝你的 EduMIP:
EduMIP:使用 HC-SR04 傳感器避開障礙物
如果您想讓距離傳感器與您的 EduMIP 一起工作,請(qǐng)?jiān)?/font>Github上找到此示例代碼,以讓您的機(jī)器人隨機(jī)駕駛避開障礙物。它基于 BluPants 項(xiàng)目,可以安裝到您現(xiàn)有的 BeagleBone Blue 映像中。有關(guān)更多詳細(xì)信息,請(qǐng)參閱Github repo 上的說(shuō)明。
或者,您可以簡(jiǎn)單地安裝 BluPants映像,這樣您就不必?fù)?dān)心所有的軟件依賴性。要安裝 BluPants 映像,請(qǐng)從此鏈接下載blupants_beagleboneblue.img.xz 映像,然后根據(jù) BeagleBone 官方入門指南中的文檔將其刷入您的機(jī)器人。啟動(dòng)映像后,您需要在 Beaglebone 中編輯兩個(gè)文件:
取消注釋行:
/usr/bin/rc_balance_dstr -i dstr &
將 robot_id 設(shè)置為 1:
"robot_id": 1,
編輯文件后,重新啟動(dòng) Beaglebone,或重新啟動(dòng) BluPants 服務(wù):
sudo service blupants 重啟
一旦服務(wù)再次運(yùn)行,您應(yīng)該能夠平衡您的機(jī)器人并使用基于 Blockly 的編程平臺(tái)BluPants Studio來(lái)控制它。
- 基于ToF 的 OPT3101 遠(yuǎn)距離接近和距離傳感器AFE數(shù)據(jù)手冊(cè) 3次下載
- 超聲波傳感器測(cè)量距離計(jì)算實(shí)例
- Arduino社交距離傳感器
- 光學(xué)距離傳感器開源分享
- 超傳感器距離標(biāo)志開源分享
- 使用距離傳感器和蜂鳴器
- 距離傳感器和OLED開源分享
- GP2Y0E系列有源光學(xué)距離測(cè)量傳感器手冊(cè) 2次下載
- 遠(yuǎn)距離激光反饋反射光電開關(guān)傳感器產(chǎn)品手冊(cè) 13次下載
- 0-10米遠(yuǎn)距離漫反射光電開關(guān)傳感器 17次下載
- 基于二維納米材料的電致敏化學(xué)傳感器詳細(xì)資料 6次下載
- 如何使用可靠信標(biāo)和節(jié)點(diǎn)度估計(jì)距離進(jìn)行無(wú)線傳感器網(wǎng)絡(luò)定位算法的說(shuō)明 6次下載
- 使用紅外技術(shù)的近距離傳感器的設(shè)計(jì) 24次下載
- 用環(huán)境光傳感器封裝近距離傳感器的優(yōu)點(diǎn) 29次下載
- 基于感知距離調(diào)節(jié)的無(wú)線傳感器網(wǎng)絡(luò)節(jié)能區(qū)域覆蓋
- 使用接近傳感器到達(dá)更遠(yuǎn)的距離 1218次閱讀
- 如何使用反射器設(shè)置廉價(jià)光束中斷傳感器控制距離場(chǎng)景 1579次閱讀
- 操作BeagleBone Black的方法 3498次閱讀
- 超聲波傳感器如何接線_超聲波傳感器測(cè)距 1.7w次閱讀
- 超聲波傳感器的應(yīng)用 1890次閱讀
- 微波傳感器的工作原理_微波傳感器應(yīng)用 1.4w次閱讀
- 激光傳感器工作原理_激光傳感器應(yīng)用 1.6w次閱讀
- dfrobot 紅外距離傳感器 介紹 2231次閱讀
- 各種距離傳感器的工作原理解析 1.6w次閱讀
- 激光傳感器原理 5617次閱讀
- 超聲波傳感器與紅外線傳感器對(duì)比誰(shuí)更好 1.2w次閱讀
- 什么是激光位移傳感器? 1.2w次閱讀
- 距離傳感器原理及應(yīng)用 1.8w次閱讀
- 電容位移傳感器原理及測(cè)量原理特性 1.4w次閱讀
- 手機(jī)距離傳感器原理及應(yīng)用 8.7w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來(lái)的未來(lái)-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論