 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
組件
|
TB6612FNG(O,C,8,EL
|
× 1 |
|
227CKS035M
伊利諾伊電容器
|
× 1 |
|
741C083510JP
|
× 1 |
|
Y1624350R000T9R
|
× 1 |
|
標頭男
?
|
× 1 |
描述
TB6612FNG 電機驅動
?
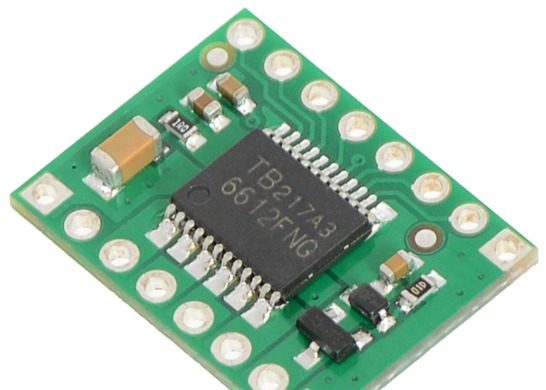
TB6612FNG電機驅動器可以以 1.2A(峰值 3.2A)的恒定電流控制多達兩個直流電機。兩個輸入信號(IN1 和 IN2)可用于以四種功能模式之一控制電機:CW、CCW、短制動和停止。兩個電機輸出(A 和 B)可以單獨控制,每個電機的速度通過頻率高達 100kHz 的 PWM 輸入信號控制。應將 STBY 引腳拉高以使電機脫離待機模式。
?
?
邏輯電源電壓 (VCC) 可以在 2.7--5.5VDC 的范圍內,而電機電源 (VM) 的最大電壓限制為 15VDC。每個通道的額定輸出電流高達 1.2A(或短單脈沖高達 3.2A)。
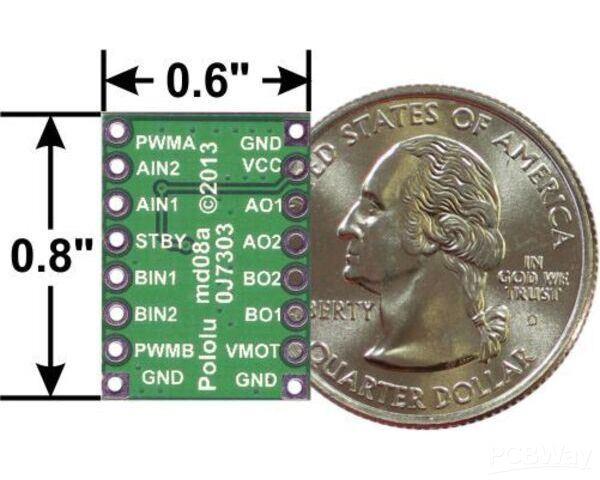
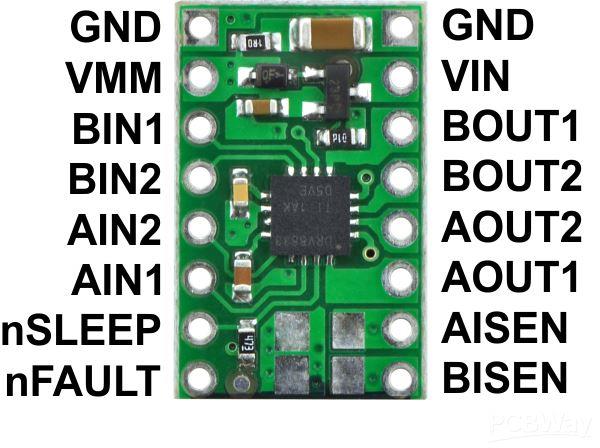
如圖所示,這個小板安裝了所有組件。兩條電源線上都包含去耦電容。TB6612FNG 的所有引腳都被分成兩個 0.1" 間距接頭;這些引腳的排列方式是輸入引腳在一側,輸出引腳在另一側。
?
?
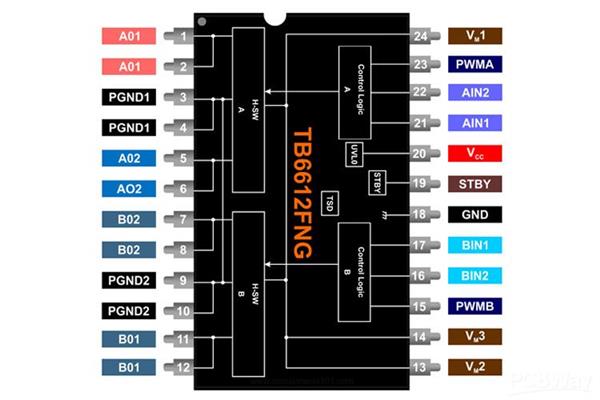
TB6612電機驅動模塊采用TB6612FNG作為驅動芯片,具有大電流(1.2A連續電流),雙通道輸出,MOSFET-H橋結構,可驅動兩臺電機。電機電壓和模塊的工作電壓是分開的——模塊的 VCC:2.7 V 到 5.5 V,電機的 VM:15V(最大值)。但電機的最佳工作電壓為2.5V-13.5V,低于2.5V時無法工作。
容易控制,通過設置MA和MB的高低電平可以控制兩個舵機的正反轉,PWMA和PWMB是控制電機轉速的;因此,只有 4 個 I/O 引腳會被占用。電機連接和信號輸入的防反接端口插接牢固方便。通過芯片內部的低壓檢測和熱關斷來保護電路,您無需擔心破壞您的項目或損壞主控板。
特征
?
?
> 采用TB6612FNG電機驅動芯片,最大輸出電流1.2A。
> 接線牢固方便,電機連接和信號輸入均帶有防反接端口。
> 簡單控制:同時控制兩臺電機 - MA 和 MB 控制電機方向,PWMA 和 PWMB 控制轉速。
> 雙電源。模塊的 VCC:2.7-5.5 V,電機的 VM:15V(最大)。
> 小巧輕便,帶3mm安裝孔,適用于智能汽車。
> 內置熱關斷電路和低電壓檢測。
> 尺寸:42 x 32 毫米
實驗測試
我用 Arduino 驅動 2 個電機
驅動 2 個電機加速和減速。
成分
-1 x TB6612 電機驅動器
-1 x Arduino Uno
-1 x 電機
-1 x 18650 電池座
-2 x 18650 鋰電池
- 幾根跳線
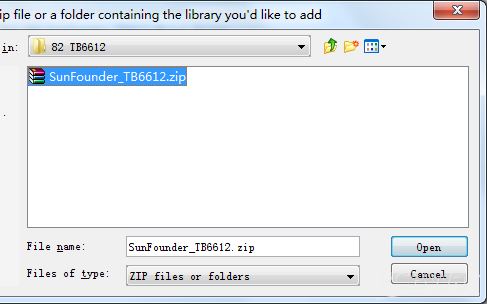
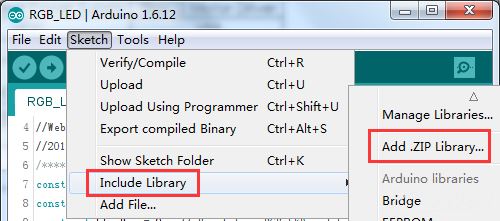
步驟 1. 安裝庫
打開 Arduino 軟件,選擇 Sketch -> Include Library -> Add .ZIP Library。
?
?
選擇下載的zip文件并打開。SunFounder_TB6612.zip
?
?
?
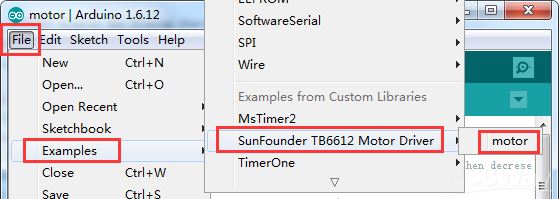
步驟 2. 打開示例
打開 File -> Examples -> Sunfounder TB6612 Motor Driver -> motor,然后上傳這個例子
?
?
步驟 3. 接線
將獨立電源連接到模塊,如下圖所示:
獨立電源TB6612電機驅動VCCVMGNDGND
將 Arduino UNO 連接到模塊:
Arduino UNOTB6612電機驅動器5VVCCGNDGND5MA6PWMA9MB10PWMB
將電機連接到模塊:
電機TB6612電機驅動器黑線A1紅線A2黑線B1紅線B2
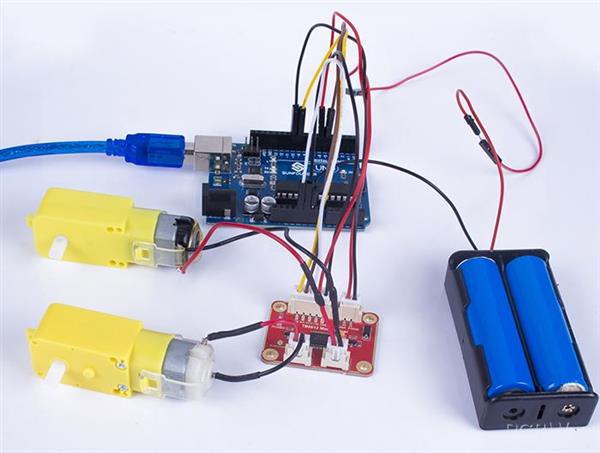
以下是接線的樣子:
?
?
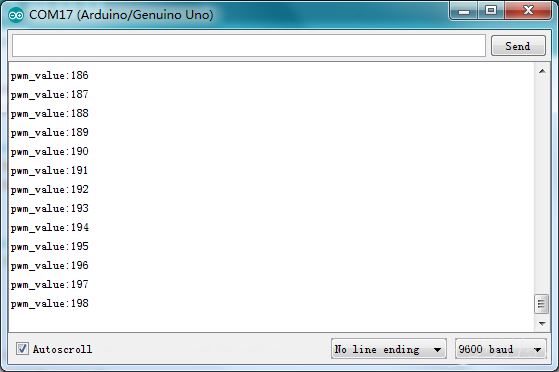
示例上傳后,電機會加速旋轉并正向減速,然后反向重復。
您可以打開串行監視器查看輸出 PWM 值的變化 - 從小到大,然后從大到小。
電機轉速與PWM值呈正相關。
?
?
II 用 Raspberry pi 控制 2 個電機
步驟 1. 接線
由于電機會消耗大量功率,因此您需要為該模塊提供獨立的電源,以確保伺服有充足的供電。
將獨立電源連接到模塊,如下圖所示:
獨立電源TB6612電機驅動VCCVMGNDGND
將樹莓派連接到模塊:
樹莓派TB6612電機驅動3.3VVCCGNDGNDGPIO17MAGPIO27PWMAGPIO18MBGPIO22PWMB
將電機連接到模塊:
電機TB6612電機驅動器黑線A1紅線A2黑線B1紅線B2
?
樹莓派的引腳:
?
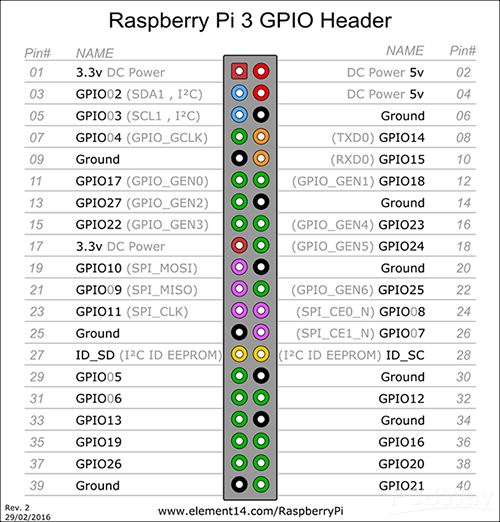
?
將伺服連接到模塊:
電機TB6612電機驅動器黑線A1紅線A2黑線B1紅線B2
步驟 2. 建立您的項目:
通過 ssh 登錄樹莓派,從 Github 復制 TB6612 倉庫:
git 克隆 https://github.com/sunfounder/SunFounder_TB6612.git
復制后,您將獲得 TB6612 的 Python 包。將其導入Python程序中,即可使用。
這是一個簡單的例子:
1.創建一個新文件:
mkdir test_TB6612/
2. 將包復制到文件中:
cd test_TB6612
cp –r /home/pi/SunFounder_TB6612 ./
3.創建代碼文件
觸摸 test_motor.py
這里你的程序的文件結構是這樣的:
測試_TB6612/
?
?
有了這個結構,就可以成功導入 Python 文件了。
接下來,讓我們看看如何控制電機。
步驟 3. 驅動電機的代碼
納米 test_motor.py
輸入以下代碼:
#!/usr/bin/env python
進口時間
從 SunFounder_TB6612 導入 TB6612
導入 RPi.GPIO 作為 GPIO
?
定義主():
進口時間
?
打印 ”********************************************”
打印 ”* *”
print "* SunFounder TB6612 *"
打印 ”* *”
print "* 將 MA 連接到 BCM17 *"
print "* 將 MB 連接到 BCM18 *"
print "* 將 PWMA 連接到 BCM27 *"
print "* 將 PWMB 連接到 BCM22 *"
打印 ”* *”
打印 ”********************************************”
GPIO.setmode(GPIO.BCM)
GPIO.setup((27, 22), GPIO.OUT)
a = GPIO.PWM(27, 60)
b = GPIO.PWM(22, 60)
一開始(0)
b.開始(0)
?
def a_speed(值):
a.ChangeDutyCycle(值)
?
def b_speed(值):
b.ChangeDutyCycle(值)
?
電機A = TB6612.電機(17)
電機B = TB6612.電機(18)
motorA.debug = True
motorB.debug = True
motorA.pwm = a_speed
motorB.pwm = b_speed
?
延遲 = 0.05
?
電機A.forward()
對于范圍內的 i (0, 101):
電機A.速度=我
time.sleep(延遲)
對于范圍內的 i (100, -1, -1):
電機A.速度=我
time.sleep(延遲)
?
motorA.backward()
對于范圍內的 i (0, 101):
電機A.速度=我
time.sleep(延遲)
對于范圍內的 i (100, -1, -1):
電機A.速度=我
time.sleep(延遲)
?
motorB.forward()
對于范圍內的 i (0, 101):
電機B.速度=我
time.sleep(延遲)
對于范圍內的 i (100, -1, -1):
電機B.速度=我
time.sleep(延遲)
?
motorB.backward()
對于范圍內的 i (0, 101):
電機B.速度=我
time.sleep(延遲)
對于范圍內的 i (100, -1, -1):
電機B.速度=我
time.sleep(延遲)
?
?
定義銷毀():
電機A.stop()
馬達B.stop()
?
如果 __name__ == '__main__':
嘗試:
主要的()
除了鍵盤中斷:
破壞()
?
按 Ctrl+X 退出,會提示保存更改,輸入 Y(保存)或 N(未保存),然后按 Enter 鍵退出。
輸入命令以運行示例:
?
python test_motor.py
?
我們仍然會看到電機加速旋轉并正向減速,然后反向重復,如前所示。
附件
數據表
SunFounder_TB6612.zip
?
?
?
- Toshiba東芝TB6612FNG電機驅動IC中文版產品規格書 4次下載
- TOSHIBA東芝TB6612FNG電機驅動IC產品規格書 0次下載
- STM32平衡小車 TB6612電機驅動學習
- 使用STM32與TB6612FNG驅動直流減速電機
- TB6612FNG電機驅動模塊純硬件調試
- 雙DC馬達驅動IC TB6612FNG產品規格介紹 1次下載
- 用PIC16F877A和TB6612FNG電機驅動的微型電路
- TB6612FNG雙路全橋驅動芯片的數據手冊和電路原理圖免費下載 33次下載
- TB6612FNG直流電動機驅動芯片的數據手冊免費下載 37次下載
- TB6612FNG驅動芯片與直流電機控制教程資料免費下載 23次下載
- 直流電機的原理和控制減速器的作用及直流電機驅動芯片TB6612FNG概述 50次下載
- 基于AVR單片機與TB6612FNG的直流電機控制的設計與實現 23次下載
- TB6612FNG_Breakout_v11 59次下載
- TB6612FNG簡介及其與單片機的直流電機控制系統設計 237次下載
- TB6612FNG在直流電機控制設計中的應用
- 步進電機驅動器的主要驅動方式有哪些?簡單介紹 406次閱讀
- 步進電機驅動器有哪些類型?該如何分類? 415次閱讀
- 電機驅動器的種類及其特點 1388次閱讀
- VFD和普通電機驅動器的區別 974次閱讀
- 如何正確選擇步進電機驅動器 2394次閱讀
- 為什么步進電機要加驅動器 1613次閱讀
- 伺服電機驅動器設置參數教程 7586次閱讀
- 開源電機驅動器開發方法與實現 1600次閱讀
- CLN17電機驅動器的特點和應用場景 1659次閱讀
- 驅動器和電機驅動器的概念 3166次閱讀
- 步進電機驅動器有什么參數_步進電機驅動器常見故障維修 1.6w次閱讀
- dfrobotTB6612FNG微型雙路直流電機驅動模塊簡介 7504次閱讀
- 步進電機驅動器工作模式_步進電機驅動器電路圖 9122次閱讀
- 東芝新推出的低功耗有刷直流電機驅動器芯片的詳細介紹 4931次閱讀
- 希捷利用HAMR技術推出48TB磁盤驅動器 4660次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論