實驗結果 - 基于光電傳感器的能自主識別道路的智能車
2012年08月07日 11:33 來源:互聯網 作者:互聯網 我要評論(0)
三、實驗結果
硬件設計
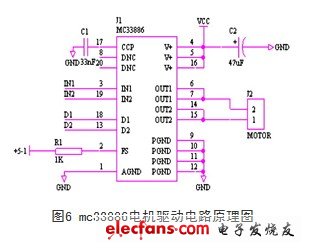
電機驅動電路
電機驅動采用mc33886作為驅動芯片,其原理如圖6所示。通過向in1、in2口送出pwm波來控制電機的正轉和反轉,正轉為智能車加速,反轉減速。改變pwm波的占空比,可控制電機的轉動速率。
速度檢測電路
本文采用增量式光電編碼器來測量車速,其輸出脈沖的頻率正比于轉速,可以通過測量單位周期內脈沖個數或者脈沖周期得到脈沖的頻率,具有較高的精度。
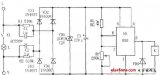
電源變換電路
智能車系統配有7.2v的蓄電池,可直接為直流電機供電。單片機、光電傳感器和光電編碼器所需電壓為5v,伺服舵機為6v。這些電壓則由7.2v蓄電池調節得來。
單片機和光電編碼器通過穩壓芯片7805穩壓輸出5v電壓供電。光電傳感器數目多、功耗大,對電源穩定性要求更高,故單獨采用效率較高的芯片lm2575對它供電。給舵機供電的芯片選用的是低壓差可調輸出三端線性穩壓器lm1117,片上提供安全操作保護等功能。
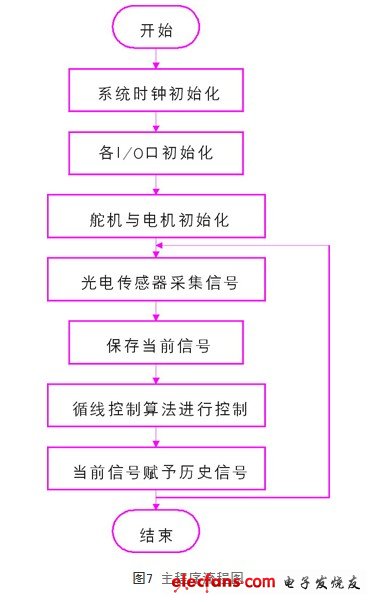
軟件設計
軟件設計分模塊實現,其中主程序包括時鐘初始化、i/o口初始化、舵機電機初始化、采集信號和控制算法,程序流程見圖7。
本文導航
- 第 1 頁:基于光電傳感器的能自主識別道路的智能車
- 第 2 頁:光電傳感器
- 第 3 頁:循線控制算法
- 第 4 頁:實驗結果
- 第 5 頁:實驗結果與分析