光電傳感器 - 基于光電傳感器的能自主識別道路的智能車
2012年08月07日 11:33 來源:互聯網 作者:互聯網 我要評論(0)
一、光電傳感器
光電傳感器的選擇及電路設計
光電傳感器位于智能車的最前方,起到預先判斷路徑的作用。其發射的光對白色和黑色有不同的反射率,因此能得到不同的電壓值,采進單片機后通過一定的算法比較電壓來判斷黑線的位置,從而控制舵機的轉動。這種方法易于實現,響應速度快,實時性好,成本低。
本文選用性價比基本適合的反射式紅外傳感器tcrt5000。紅外光電傳感器電路的設計形式多種多樣,由于本文算法中采用的是傳感器陣列經驗判斷方法,為了控制簡便采用數字量輸出傳感器電路,如圖2所示。
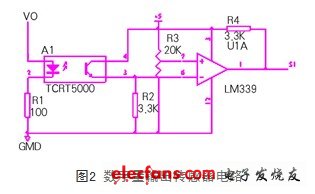
光電管采用脈沖調制式發光,即vo是震蕩電路產生的脈沖電壓,這樣易濾除外界干擾。雖然電路相對復雜,但足以保證模型車的穩定行駛。
光電傳感器布局的研究
光電管陣列的布局直接影響智能車的循線效果。一般來說,典型的布局有“一”字形布局和“w”形布局兩種。
所謂“一”字形布局,就是把多個傳感器按照“一”字排開。這種傳感器布局方式最常見,算法在理論上易于實現。其不足之處在于:對賽道的曲率幾乎沒有任何預測功能。因此一般不采用這種布局。
而“w”形布局,是把多個傳感器按照“w”形排列。“w”形布局由于傳感器分布在兩排,使得智能車對彎道有一定的預測功能,這種預測功能特別體現在直道進入彎道時刻。后一排傳感器仍在直道時,前一排傳感器已經進入彎道。而不足之處是增加了控制算法的復雜程度,判斷舵機的旋轉方向時,往往需要上一次的檢測數據。經驗判斷的可能性也隨著傳感器數量的增加而增加。
光電傳感器布局仿真
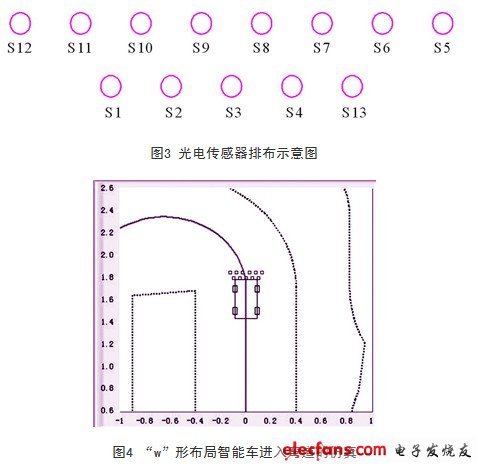
經多次仿真實驗,最終確定了傳感器的布局和數量。采用如圖3所示的“w”形布局,一共有13個傳感器,前排8個,后排5個,前后兩排間距為3.5cm。設置這個間距,使其對賽道有一定預測功能。具體的布局及仿真效果如圖4所示。
本文導航
- 第 1 頁:基于光電傳感器的能自主識別道路的智能車
- 第 2 頁:光電傳感器
- 第 3 頁:循線控制算法
- 第 4 頁:實驗結果
- 第 5 頁:實驗結果與分析