混合電動(dòng)汽車能量流仿真系統(tǒng)設(shè)計(jì)與分析(2)
2012年05月29日 11:47 來(lái)源:本站整理 作者:秩名 我要評(píng)論(0)
選用Microchip公司的PIC18F6720為主控制器,該MCU片內(nèi)集成多通道的10位精度的采樣轉(zhuǎn)換器,可以方便的采集電池的電壓、充電電流、放電電流和電池溫度等多種信號(hào);內(nèi)置兩個(gè)串行通信接口,可以與上位機(jī)進(jìn)行異步通信;SPI接口可以用來(lái)擴(kuò)展內(nèi)部總線;PWM輸出可以對(duì)回路電流進(jìn)行調(diào)節(jié)等。控制系統(tǒng)電路如圖5所示。
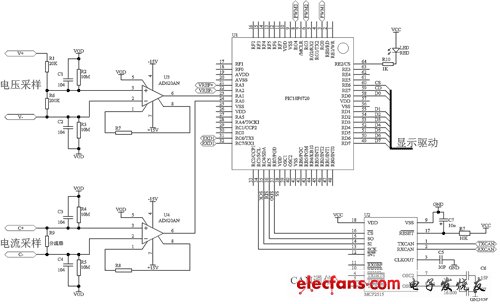
圖5 控制系統(tǒng)電路
4 人機(jī)交互
通過(guò)LCD顯示器可以直觀的顯示系統(tǒng)的工作狀態(tài)和電池工作情況,具有良好的人機(jī)交互界面。在控制系統(tǒng)中設(shè)置了短路與過(guò)熱保護(hù),故障報(bào)警指示,最大限度達(dá)到系統(tǒng)的安全可靠,保護(hù)系統(tǒng)與動(dòng)力電池的安全。圖6為L(zhǎng)CD顯示的示意圖。
(a)工作狀態(tài)
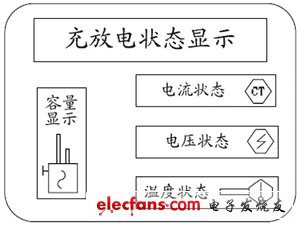
(b)測(cè)試狀態(tài)
圖6 LCD顯示示意圖
通信系統(tǒng)
系統(tǒng)內(nèi)建了兩種通信總線:CAN2.0B和RS-232C。
1 CAN總線通信
CAN總線是專為解決現(xiàn)代汽車中各種控制器、執(zhí)行機(jī)構(gòu)、監(jiān)測(cè)儀器和傳感器之間的數(shù)據(jù)通信而開發(fā)的總線式串行通信技術(shù)。但CAN只包括了物理層和數(shù)據(jù)鏈路層,在汽車工程師協(xié)會(huì)SAE推薦的標(biāo)準(zhǔn)SAE J1939進(jìn)一步規(guī)范了汽車內(nèi)部網(wǎng)絡(luò)的標(biāo)準(zhǔn)。
J1939采用CAN2.0B的擴(kuò)展幀格式。進(jìn)一步定義了CAN數(shù)據(jù)幀仲裁域中的標(biāo)識(shí)位。29位ID的格式如表1所示。
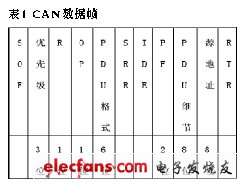
一個(gè)協(xié)議數(shù)據(jù)單元(PDU)包括7個(gè)預(yù)定的域。它們是優(yōu)先級(jí)、保留位、數(shù)據(jù)頁(yè)、PDU格式、PDU細(xì)節(jié)、源地址和數(shù)據(jù)域。CAN數(shù)據(jù)幀中的SOF、SRR、IDE和RTR部分控制域,CRC、ACK和EOF沒(méi)有包括在PDU。
數(shù)據(jù)域?yàn)?~8字節(jié)的數(shù)據(jù)。當(dāng)需要使用9~1785字節(jié)來(lái)表達(dá)某個(gè)參數(shù)組時(shí),數(shù)據(jù)通信將由多個(gè)CAN數(shù)據(jù)幀完成。
本文導(dǎo)航
- 第 1 頁(yè):混合電動(dòng)汽車能量流仿真系統(tǒng)設(shè)計(jì)與分析(1)
- 第 2 頁(yè):控制系統(tǒng)電路
- 第 3 頁(yè):RS-232C通信
上周熱點(diǎn)文章排行榜
- 日本開發(fā)出用于振動(dòng)發(fā)電新合金
- 外國(guó)牛人教你一步步快速打造首臺(tái)機(jī)器人(超詳
- 全球首款惠普Z(yǔ)1電腦拆解:德州儀器、英特爾成最
- 揭秘磁懸浮燈泡無(wú)線電力傳輸(附完整電路圖)
- 華為畢業(yè)四年菜鳥身價(jià)千萬(wàn) HTC最需要害怕的新對(duì)
- 華為內(nèi)部工資和待遇詳解,50%員工空談28萬(wàn)年薪?
- 蘋果汽車iCar創(chuàng)意設(shè)計(jì)圖曝光:再次改變世界!
- 芯片級(jí)拆解:剖析新型LED燈泡設(shè)計(jì)的藝術(shù)
- 最具創(chuàng)意LED發(fā)明:仿生LED隱形眼鏡 虛擬天空
- 單片機(jī)設(shè)計(jì)經(jīng)驗(yàn)技巧精華集錦
上周資料下載排行榜
論壇熱帖
- 7種你從沒(méi)想過(guò)的LED照明應(yīng)用,最后一個(gè)亮瞎了 assingle
- 2012,我們畢業(yè)啦-畢業(yè)季分享活動(dòng)正式上線 assingle
- 【博客分享季】 我的單片機(jī)入門 kisswo
- 碉堡了,這是5星級(jí)賓館的標(biāo)準(zhǔn)阿~ 東十三少
- 【我們畢業(yè)啦】二逼青歡樂(lè)多-畢業(yè)照片回顧 cch6213
- 話說(shuō)今天終于收到耳機(jī)了,曬圖 小鷹fighting
- 【畢業(yè)設(shè)計(jì)秀】謝謝A670521546在百忙之中幫我,原理圖已上傳 jiang874896
- FPGA設(shè)計(jì)大賽設(shè)計(jì)方案提交規(guī)則和截止時(shí)間須知 wangka
- 發(fā)布《精通LabVIEW虛擬一起程序設(shè)計(jì)》暨-【送書活動(dòng)預(yù)告】 assingle
- 【我們畢業(yè)啦】那年 我們很快樂(lè) hh824829
熱門博文
創(chuàng)新實(shí)用技術(shù)專題


熱評(píng)
- LM3S9B96開發(fā)板手冊(cè)及原理圖
- STM32F103ZET6紅牛電路圖
- 高通發(fā)布全新設(shè)計(jì)DragonBoard板
- NI推出Single-Board RIO嵌入式介面
- protel99se正式漢化版免費(fèi)下載
- hi3515海思原版原理圖
- matlab 7.0軟件下載(免費(fèi)破解版)
- TX-1C型單片機(jī)開發(fā)板原理圖
- 三菱A500變頻器原理圖
- 三相IGBT全橋隔離驅(qū)動(dòng)電源設(shè)計(jì)
博文
- 問(wèn)什么郵箱激活不了
- 八成大學(xué)生認(rèn)同先就業(yè)后擇業(yè)
- 我的心路
- 為什么郵箱激活不了
- 到底有多少人在校園里浪費(fèi)青春
- 你是否曾這樣傷害過(guò)一個(gè)人?
- 到底有多少人在校園里浪費(fèi)青春
- 小小的電阻,您真的吃透了它的用法嗎
- 2012.5.12 第一個(gè)DS18B20程序
- 寧愿睡地板,也要?jiǎng)?chuàng)業(yè)做老板!
帖子
- 【博客分享季】 我的單片機(jī)入門 kisswo
- 7種你從沒(méi)想過(guò)的LED照明應(yīng)用,最后一個(gè)亮瞎了 assingle
- labview設(shè)計(jì)憤怒的小鳥 海角一客
- 發(fā)布《精通LabVIEW虛擬一起程序設(shè)計(jì)》暨-【送書活動(dòng)預(yù)告】 assingle
- 【畢業(yè)設(shè)計(jì)秀】基于51單片機(jī)的音樂(lè)頻譜時(shí)鐘 我本邪惡
- 2012(單片機(jī)學(xué)習(xí)工具包)40G視頻教程 donghhao
- 本人設(shè)計(jì)的一款游戲耳機(jī),給大家分享一下 qiu4466
- 【我們畢業(yè)啦】二逼青歡樂(lè)多-畢業(yè)照片回顧 cch6213
- 2012,我們畢業(yè)啦-畢業(yè)季分享活動(dòng)正式上線 assingle
- Protel教程免費(fèi)獲取 QQ190175688
用戶評(píng)論
查看全部 條評(píng)論
查看全部 條評(píng)論>>