為了防止故障節點干擾甚至阻塞整個CAN網絡系統,CAN協議實現了復雜的故障限制機制。為了保證通信的正常,CAN 2.0 總線協議總線中各節點需要采取以下措施進行錯誤檢測。
2022-11-08 17:12:44 7486
7486 在ISO 11898-2和ISO 11898-3中分別規定了兩種CAN總線結構(在BOSCH CAN2.0規范中,并沒有關于總線拓撲結構的說明):高速CAN總線和低速CAN總線,區別表如下所示。
2023-04-07 09:30:181836 
為了防止故障節點干擾甚至阻塞整個CAN網絡系統,CAN協議實現了復雜的故障限制機制。為了保證通信的正常,CAN 2.0 總線協議總線中各節點需要采取以下措施進行錯誤檢測:
2023-06-21 17:14:181840 
在檢查數據總線系統前,須保證所有與數據總線相連的電控單元無功能故障。功能故障指不會直接影響數據總線系統,但會影響某一系統的功能流程的故障。如傳感器損壞,其結果就是傳輸器信號不能通過數據總線傳遞。這種
2023-09-15 10:41:014991 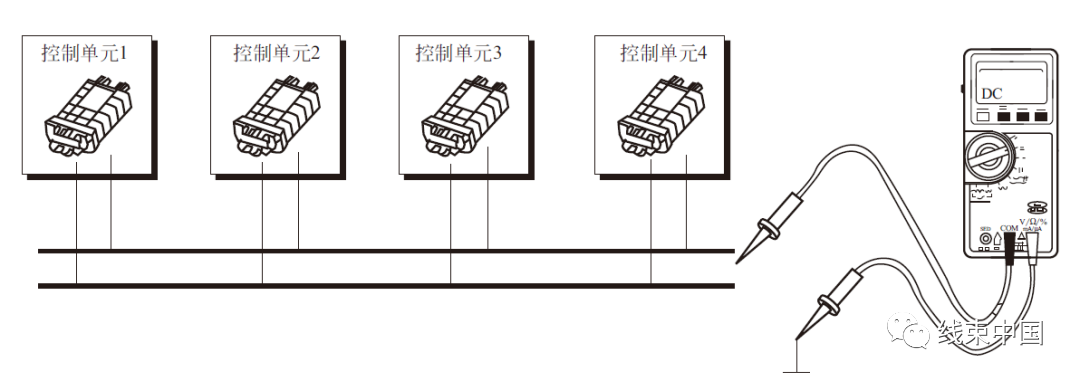
這意味著變送器通過CAN收發器改變總線電平,并將其信息傳輸到CAN總線。接收器通過監測總線電平將總線上的信息讀取到自己的CAN收發器中。
2024-02-19 14:53:54606 
“0”。CAN總線采用二進制不歸零(NRZ)編碼方式,所以總線上不是“0”,就是“1”。但是CAN協議并沒有具體定義這兩種狀態的具體實現方式,如圖7-7所示。 (10)故障界定(Confinement
2014-04-27 15:16:02
“0”。CAN總線采用二進制不歸零(NRZ)編碼方式,所以總線上不是“0”,就是“1”。但是CAN協議并沒有具體定義這兩種狀態的具體實現方式,如圖7-7所示。 (10)故障界定(Confinement
2014-04-18 16:36:30
現場總線VS工業以太網現場總線CAN總線(Control Area Network)一、CAN總線是什么?CAN總線的作用?CAN總線的優點CAN總線拓撲圖各接口協議速率對比
2021-08-06 07:44:19
我們先簡單總結一下CAN的錯誤處理與故障界定:1.CAN控制器記錄發生在發送/接收過程中,總線數據出現錯誤的總數(位錯誤,CRC錯誤等)。2.CAN控制器根據總線出錯數量由低到高,依次處于主動錯誤
2021-08-20 06:18:45
CAN通訊總線競爭數據保護物理設計總線邏輯錯誤檢測機制總線邏輯錯誤處理機制錯誤跟蹤機制POWER PC芯片 CAN配置總線競爭總線競爭解決的是在同一時間,多個節點同時向總線發送消息的問題。解決的方法
2022-01-13 06:16:09
消失,說明故障在短路點之前,反之則在短路點之后查找。欲短路的兩點之間若直流電位不同,應通過適當容量的電容器短接。判斷儀表故障還有幾種簡單的方法:1.儀表無任何顯示,主要原因是電池供電不正常或接觸不好
2009-08-06 15:23:14
電纜故障測試儀查找埋地電力電纜故障的正確方法:1、解析電線故障本質,理解故障電線的范例相同性質的電線故障要用相反的辦法測試,相反介質的電線有相反的測試進度,相反耐壓頭銜的電線則有相反的耐壓請求。與被
2019-01-21 11:18:14
STM32 中的CAN總線模塊是具有故障監測功能的就是CANx_SCE_IRQHandler這個用的很少,它叫CAN總線狀態改變中斷通過打開這個中斷,配合代碼可以精確的監測CAN總線的故障情況就是
2021-08-19 08:20:11
對于小電流接地系統,如何快速查找單相接地故障,我給大家介紹一些簡單可行的方法。1、利用接地選線裝置和故障指示器來查找 變電站一般都安裝了接地選線裝置,雖然有時不準,但可以為人工拉閘提供技術參考。然后
2011-12-13 11:28:49
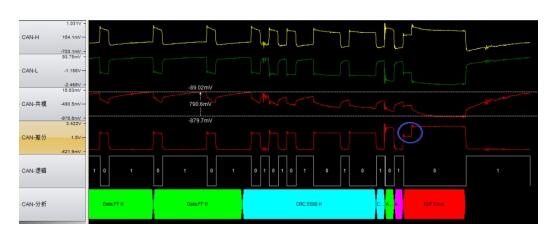
CANScope分析儀是什么?如何快速判斷CAN總線的故障節點?
2021-05-20 06:44:41
有效數據,這樣可以有效保證數據的實效性和準確性。傳統的轎車在機艙和車身內需要埋設大量線束以傳遞傳感器采集的信號,而Can-Bus總線技術的應用可以大量減少車體內線束的數量,線束的減少則降低了故障發生
2015-06-24 13:56:39
介紹了汽車CAN總線系統的設計方法。全書共10章,首先介紹了汽車網絡通信系統的特點,全面闡述了當今汽車網絡系統的結構、類型、應用及其發展趨勢,然后著重對CAN總線通信系統的原理和特點、帶CAN接口的飛
2018-04-09 22:27:02
1、人工巡線法: 有經驗人員首先分析線路的基本情況。線路環境(有無樹)、歷史運行情況(原先經常接地),判斷可能接地點。 2、分段選線法 如果線路上有分支開關,為盡快查找故障點,可用分斷分支
2020-12-07 15:17:50
基于DSP和CAN總線的機車故障數據采集系統設計
2009-05-08 17:19:01 16
16 冗余技術是提高計算機控制系統可靠性的重要措施之一。本文在分析傳統雙機冗余系統不足之處的基礎上,提出基于CAN 總線的雙機冗余系統的設計方法。此方法同樣適用于多機冗余
2009-05-14 14:39:4235 CAN 總線作為一種現場總線,應用極為普及。本文給出了一種基于AT89C51 和SJA1000 的CAN 總線節點設計方法,并對軟硬件進行了相應的說明。關鍵詞:CAN 總線,SJA1000,單片機CAN(C
2009-05-25 13:26:1259 針對紡織生產過程中清紗機的工作特點,提出了一種基于CAN總線技術的控制系統設計方法,分析了系統的工作原理、網絡拓撲結構及其硬件構成,詳細闡述了CAN總線的網絡接口方法
2009-11-01 09:33:1413 針對當前CAN總線及J1939協議在汽車電子中的廣泛應用,給出一種通過配置在低成本CAN I/O擴展器MCP2502X/05X器件上實現J1939協議的CAN總線節點的設計方法。詳細介紹擴展節點的配置方法和
2010-12-29 18:08:4528 ?摘要:介紹了一種用單片機ADμC812、CAN總線控制器SJA1000和CAN總線驅動器POA82C250組成的CAN總線智能節點的設計方案,給出了該節點的硬件結構和軟件設計方法,同時介紹
2006-03-11 11:47:39949 
PLC故障查找方法流程圖及其處理對策
本文列舉了PLC五種故障查找方法的流程圖,并列出常規輸入、輸出單元故障處理對策。 PLC有
2009-06-15 13:26:53954 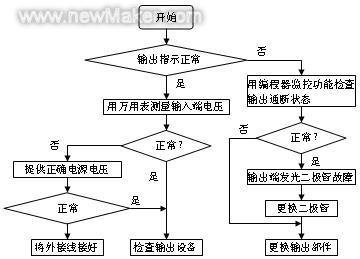
采用ADuM1201的CAN總線隔離方法
can(controller area network)[3]總線又稱控制局域網絡,最早由德國bosch公司推出,用于汽車內部測量與執行部件之間的數
2009-10-30 14:11:579704 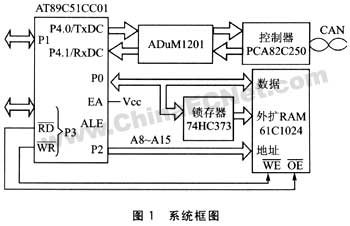
如何迅速查找電動車故障
修理電動自行車分兩步進行,即查找故障和修理排除
2009-11-16 13:40:281608 本文首先介紹PCI總線控制器PCI9052與CAN總線通信控制器SJA1000的工作原理,并且介紹了PCI總線和CAN總線通信控制器接口的硬件和軟件實現方法。
2011-09-23 17:34:221938 
本文介紹了CAN 總線的主要性能及特點,CAN 總線在實際工業應用中的總體結構,同時給出了CAN 總線協議轉換器的硬件設計方法和通信協議。主要研究了CAN 總線接口電路設計,把所設計的
2011-10-31 15:01:47463 文中分析了CAN總線的發展和汽車CAN總線技術的特征,對CAN總線在汽車領域的應用進行了深入的探討。
2011-12-14 14:58:1084 關于電子電路故障查找技巧,內容十分詳細!11!!
2016-06-17 16:48:120 介紹 阿美族30660高速CAN收發器設計能夠承受總線故障。沒有任何損壞IC的景觀或能線可能對地短路,或電池供電。然而在一些總線故障可能會發生功耗增加的條件。這將導致結溫上升。兩個總線狀態可以區分
2017-04-01 17:11:0714 CAN總線通信協議的分析和實現 CAN總線通信協議以及其實現方法
2017-09-04 08:45:3340 本文介紹了PLC的常見故障和組件的更換方法,希望對從事自動化控制方面的朋友有所幫助。 一、PLC的故障現象與查找處理 1、故障現象:PLC停止在某些輸出被激勵的地方(通常是處于中間狀態)。查找與處理
2017-11-02 15:15:426 應用最廣泛的現場總線之一。在建立之初,CAN總線就定位于汽車內部的現場總線,具有傳輸速度快、可靠性高、靈活性強等優點。上世紀90年代CAN總線開始在汽車電子行業內逐步推廣,目前已成為汽車電子行業首選的通信協議,并且在醫療設備、工業生產、樓宇設施、交通運輸等領域中取得了廣泛
2017-11-09 20:22:4243735 
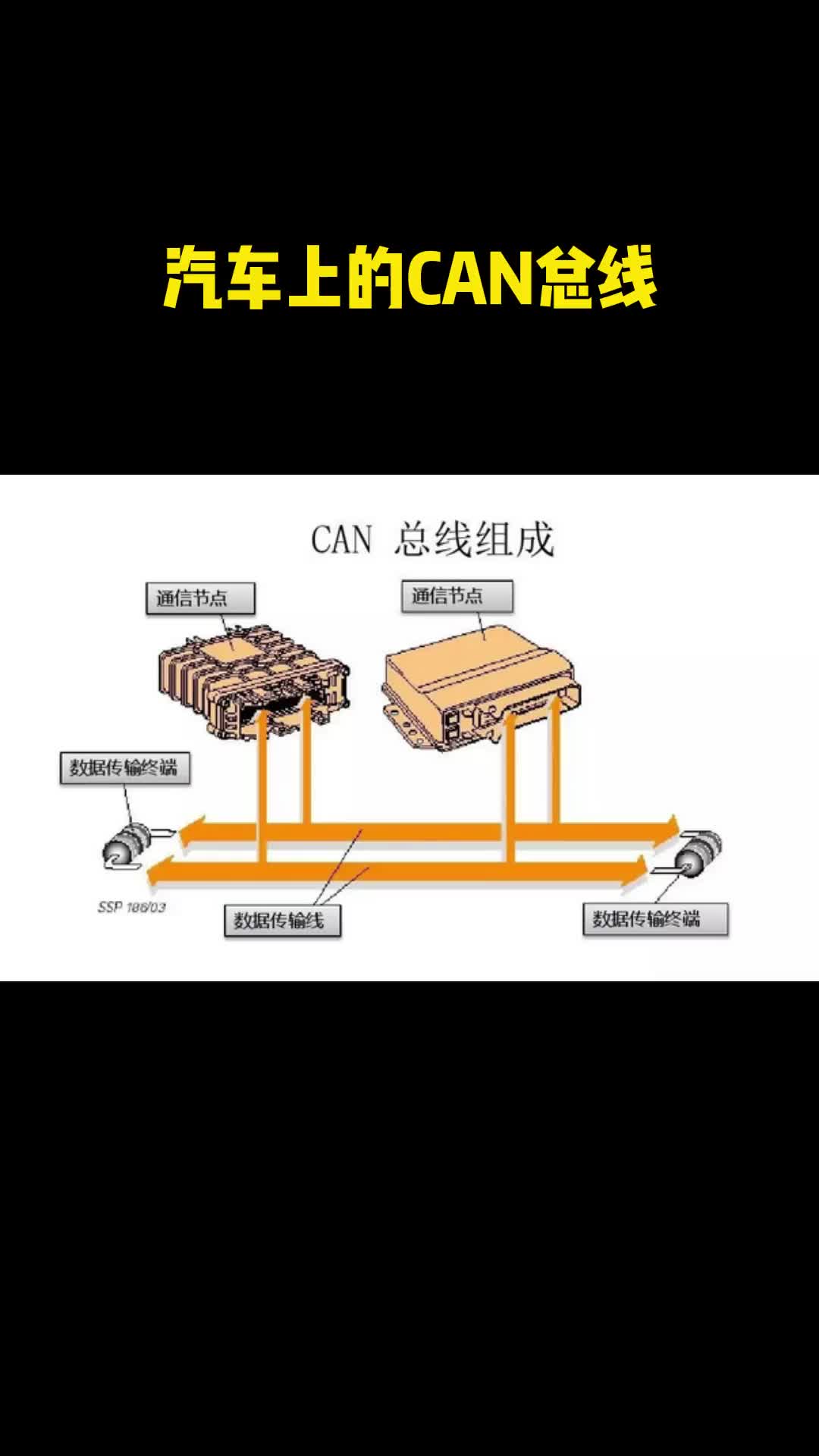
CAN總線系統中擁有一個CAN控制器、一個信息收發器、兩個數據傳輸終端及兩條數據傳輸總線,除了數據總線外,其他各元件都置于各控制單元的內部。分析CAN總線系統產生故障的原因
2017-11-27 11:01:45317841 本文首先介紹了CAN總線的總體結構,其次介紹了汽車CAN總線數據傳輸系統構成及工作原理,最后介紹了汽車CAN總線故障產生的原因以及用萬用表測量診斷CAN總線方法詳解。
2018-04-25 08:54:18145063 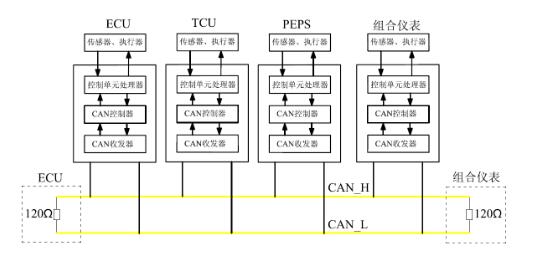
CAN已經形成國際標準,并已被公認為幾種最有前途的現場總線之一。CAN 總線的數據通信具有突出的可靠性、實時性和靈活性。由于其良好的性能及獨特的設計,CAN總線越來越受到人們的重視,它在汽車領域上的應用是最廣泛的。接下來及跟隨小編一起來了解一下CAN總線的工作原理、特點及優缺點、應用領域及應用案例吧。
2018-05-07 10:36:3933700 
轎車的設計概念帶入一個新的境界。本文首先介紹了天籟CAN總線故障(IPDM故障),其次介紹了日產天籟2.3轎車無法啟動故障原因解檢修,最后闡述了東風日產天籟加速無力的故障現象及原因是什么,具體的跟隨小編一起來了解一下。
2018-05-07 14:54:5646854 
和關聯;重新定義CAN總線的開發測試方法,可對CAN網絡通信正確性、可靠性、合理性進行多角度全方位的評估;幫助用戶快速定位故障節點,解決CAN總線應用的各種問題,是CAN總線開發測試的終極工具。
2018-08-12 11:51:1412453 
本文說的CAN即是一種總線,也是一種協議。因此,我們常聽見CAN總線,也常聽見CAN協議。CAN協議和CANOpen協議是兩套不同的協議。從軟硬件層次來劃分,CAN協議屬于硬件協議,而CANOpen
2018-10-03 19:53:0073332 
汽車CAN總線關閉故障發生時,應分析物理層包括CAN線路、CAN控制器及收發器、CAN信號干擾等外在因素,同時分析CAN寄存器及軟件處理,重新初始化CAN驅動和恢復正常后,定時嘗試往外發送
2018-11-27 17:00:4938317 為了弄清CAN總線是否完好工作,必須觀察總線上的通信情況。在這種情況下不需要分析單個位,而只需要觀察CAN總線是否工作。示波器測量說明: “CAN總線很可能無故障工作”。
2018-11-28 17:22:418746 根據電纜廠家的經驗,介紹幾種查找故障點的方法。 電纜故障點的查找方法: (1) 測聲法:所謂測聲法就是根據故障電纜放電的聲音進行查找,該方法對于高壓電纜芯線對絕緣層閃絡放電較為有效。此方法所用設備為直流耐壓試驗機。
2020-06-11 17:14:467591 本文主要介紹了PLC外圍線路和控制線路的故障查找及解決方法。
2019-10-18 11:22:106958 查找線路故障一般有電壓法和電阻法。電壓法就是利用測電壓來檢測故障點,電阻法就是利用測電阻來查找故障。它們各有優勢,如果對線路不熟悉,我們推薦用電阻法來判斷故障,相對較安全。
2020-04-09 08:49:5010934 
采用NXP公司的Cortex-M3處理器作為CAN總線的發送端,并以ZLG公司的PCI9820I CAN卡作為CAN總線的接收端測試數據的傳輸。重點介紹闡述了系統硬件和軟件的設計方法。系統可靠地實現了CAN通信。
2021-04-19 16:55:0241 結合汽車技術發展對傳統布線方法中存在的問題和CAN總線系統的使用進行了介紹,總結了CAN總線系統的優點。
2021-04-19 17:31:3033 檢驗CAN總線信號方法說明。
2021-04-19 17:32:4614 以MSCAN08和MSCAN12為示例,講述CAN現場總線,初步掌握CAN總線技術的應用。
2021-04-20 16:12:35287 直流接地故障檢測原理分析及接地故障種類 查找方法(lg純平電視開關電源)-本資料是直流接地故障檢測原理分析及接地故障種類、查找方法,希望能夠給各位開發者提供幫助
2021-07-26 12:13:3119 CAN總線是什么意思 CAN的全稱是Controller Area Network,中文名稱是控制器局域網絡,是由德國BOSCH公司開發的,并且最后成為國際標準,這是目前應用最多的現場總線之一。現場
2021-08-07 16:37:1317486 很多的司機朋友以及工控圈的朋友都有聽到過“CAN總線”一詞,今天我們就來一起看一下CAN總線為什么這么火? CAN總線,也叫做控制器局域網總線(Controller Area Network
2022-01-15 17:04:485782 CAN總線的應用越來越廣泛,工程師在不同工況下,如何快速實現故障定位呢?本文將介紹CAN網絡故障帶來的麻煩,以及快速定位故障的幾種方法,可以幫您快速完成判斷并進行選擇。
2022-03-10 09:09:473517 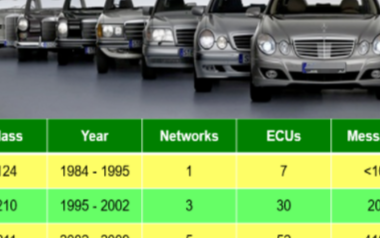
電纜故障點的查找方法是什么 間接短路或斷線毛病用萬用表可間接測量判別,用兆歐表搖測芯線間絕緣電阻或芯線對地絕緣電阻,依據其阻值可斷定毛病類型。障類型確定后,查找毛病點并不是一件容易的事情,小編引見
2022-03-29 11:54:034029 高速CAN總線上為顯性電平(邏輯0)時,CAN_H為3.5V、CAN_L為1.5V,此時電壓差是2V,顯性狀態的CAN總線電壓范圍。
高速CAN總線上為隱性電平(邏輯1)時,CAN_H和CAN_L都為2.5V,此時電壓差就是0V,隱性狀態的CAN總線電壓范圍。
2022-09-13 16:57:223631 撰寫本文的主要目的是指導 CAN 總線的研發與測試人員,排查 CAN 總線常見的故障,并 且提出相應的解決方案,彌補國內此類文章的空白。由于篇幅有限,如果讀者還不熟悉 CAN 總 線原理,請先閱讀《項目驅動——CAN-bus 現場總線基礎教程》。
2022-09-22 15:30:102 最近很多師傅問儀表功能全部失效,沒轉速,沒水溫等等,故障碼報的是通訊故障,那么CAN通訊故障如何檢修呢? CAN線是兩根線攪在一起,CAN高的電壓在2.6伏左右;CAN低的電壓在2.4伏左右;兩根
2022-11-22 10:33:525679 CAN可以判斷出錯誤的類型是總線上暫時的數據錯誤還是持續的數據錯誤(如單元內部故障、驅動器故障、斷線等),由此功能,當總線上發生持續數據錯誤時,可將引起此故障的單元從總線上隔離出去。
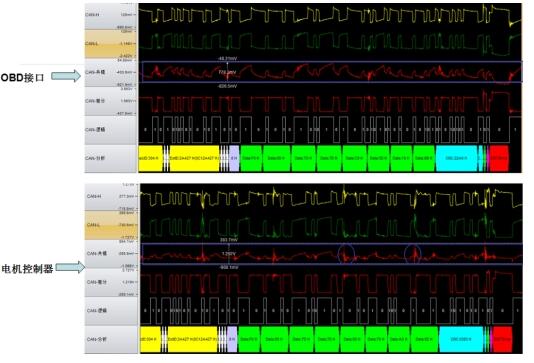
2022-11-22 10:49:00768 診斷接口的6號針腳連接CAN H 導線,14號針腳連接CAN L 導線。如果診斷接口上連接有兩組CAN總線,那么動力CAN總線使用6號和14號針腳,舒適總線使用3號和11號針腳。診斷接口的針腳含義如下圖所示。
2022-12-05 10:23:002419 在本文中將繼續為大家深入講解CAN總線的位填充機制、錯誤檢測和故障界定、網絡拓撲、終端匹配、電纜與接線、差分信號電壓幅值。
2023-02-09 11:05:201039 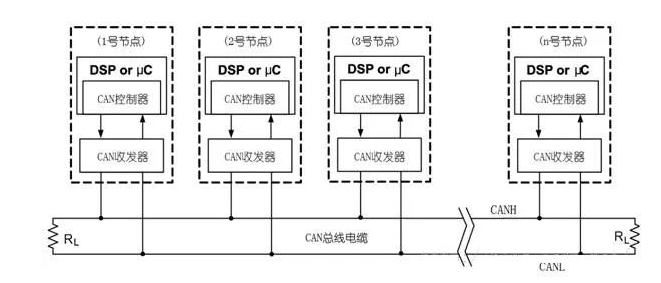
查找線路故障一般有電壓法和電阻法。電壓法就是利用測電壓來檢測故障點,電阻法就是利用測電阻來查找故障。它們各有優勢,如果對線路不熟悉,我們推薦用電阻法來判斷故障,相對較安全。
2023-03-07 10:57:59742 CAN總線在設計之初,就規定了物理層CAN_H和CAN_L采用雙絞線差分傳輸,這樣做的目的是提高抗干擾能力,因為當總線上CAN_H與CAN_L遇到干擾可以“同上同下”變化,從而差分值保持不變,如下圖所示。
2023-05-17 10:45:523234 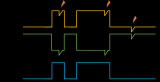
CAN總線憑借著可靠、實時、經濟和靈活的優勢,在汽車、工業等領域得到廣泛應用,并逐漸普及到電池儲能、醫療器械、智能大樓等應用場景中。隨著CAN總線在越來越多領域得到應用,CAN總線測試的需求也逐漸
2023-05-19 09:55:473857 
由于好多現場會出現將CAN總線的設備接到EtherCAT網絡中,由于協議的不相同,不能直接進行連接,現需一種能同時兼容CAN 總線和ETHERCAT網絡的一種設備,由此遠創智控YC-ECT-CAN
2023-07-06 09:55:58514 
由于好多現場會出現將CAN總線的設備接到EtherCAT網絡中,由于協議的不相同,不能直接進行連接,現需一種能同時兼容CAN 總線和ETHERCAT網絡的一種設備,由此捷米JM-ECT-CAN
2023-07-31 09:07:29349 
由于好多現場會出現將CAN總線的設備接到EtherCAT網絡中,由于協議的不相同,不能直接進行連接,現需一種能同時兼容CAN 總線和ETHERCAT網絡的一種設備,由此捷米JM-ECT-CAN
2023-10-31 18:30:00437 
目前國內商用汽車普遍采用J1939通信協議構架CAN通信網絡。CAN總線發生故障時,如何高效地查找故障原因,一直是困擾維修工一大難題。本文以歐曼GTL超能版重卡為例,就CAN線開路和短路故障給出了排查方案,相信會對廣大維修工有所幫助。歐曼GTL超能版重卡CAN網絡拓撲結構如下圖所示。
2023-08-04 17:01:482748 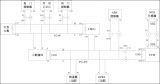
認識CAN 總線錯誤的第一步就是了解認識CAN 總線協議和它的具體功能,這樣才能更容易地理解CAN 總線是如何去發現并解決錯誤的。
2023-08-14 15:18:463228 
CAN總線的應用越來越廣泛,工程師在各種不同工況下,如何選擇最合適的網絡拓撲方式呢?本篇文章將介紹主流的幾種總線拓撲方式,以及如何解決CAN總線故障。
2023-08-28 14:57:58234 當CAN總線出現故障或數據傳輸異常時,往往會出現多種奇怪的故障現象,如儀表板顯示異常,車輛無法啟動,啟動后無法熄滅,車輛動力性能下降,某些電控系統功能失等。
2023-08-29 10:06:15823 
一站式PCBA智造廠家今天為大家講講新設計PCB板查找故障方法有哪些?PCB板查找故障方法。對于一個新設計的PCB板,往往很難調試,尤其是板子很大,元器件多的時候,往往很難上手;如果掌握了一套
2023-09-04 09:30:19510 
can總線負載率多少合理? CAN總線是一種控制器區域網絡,它是用于在不同設備之間進行通信的技術。CAN總線的應用領域廣泛,例如汽車、航空航天、醫學儀器等。在CAN總線中,數據通過網絡傳輸,并且在
2023-09-07 15:05:412173 工程師們評估網絡的性能和可靠性。本文將詳細介紹CAN總線負載率的計算方法。 一、CAN總線負載率的定義 CAN總線負載率,指的是在一個特定時間內,總線上發送和接收數據的比率。如果總線的負載率過高,就會導致數據沖突、錯誤和延遲等問題,最終
2023-09-07 15:05:452584 1、CAN總線的常見故障 CAN總線錯誤分析與解決 當CAN總線出現故障或數據傳輸異常時,往往會出現多種奇怪的故障現象,如儀表板顯示異常,車輛無法啟動,啟動后無法熄滅,車輛動力性能下降,某些電控系統
2023-09-14 16:30:071595 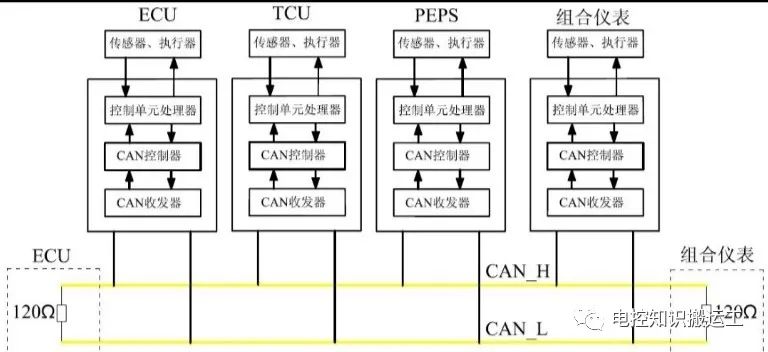
,CAN電壓電位置于隱性電壓值(約2.5V)。實際測量兩條CAN導線的電壓,會發現始終在2.5V左右,基本不變化。 故障排除方法:通過插拔CAN總線上的控制模塊(節點),可以判斷是由節點引起的短路還是導線連接引起的短路。 逐個斷開節點,若電壓恢復正常,則說明該節點有問題。若斷開所有節點后
2023-09-14 16:34:351787 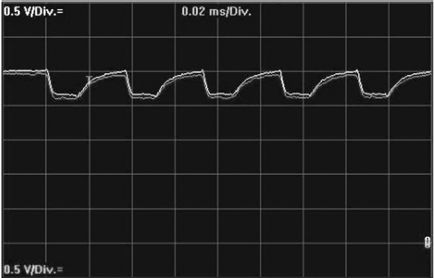
CAN H對電源(正極)短路當出現CAN H對電源(正極)短路這種故障時,根據CAN總線的容錯特性,可能出現整個CAN網絡無法通信的情況或產生相關故障碼。 以對12V電源短路為例,此時CAN
2023-09-14 16:42:511594 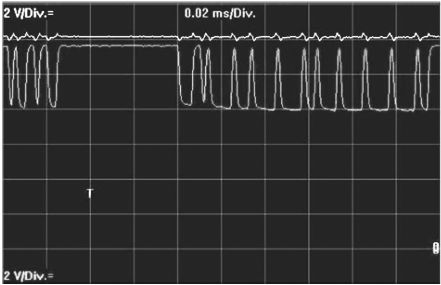
CAN H對地短路 當出現CAN H 對地短路這種故障時,根據CAN總線的容錯特性,可能出現整個CAN網絡無法通信的情況或產生相關故障碼。 CAN H 的電壓位于0V,CAN L 電壓也位于0V
2023-09-14 16:47:01992 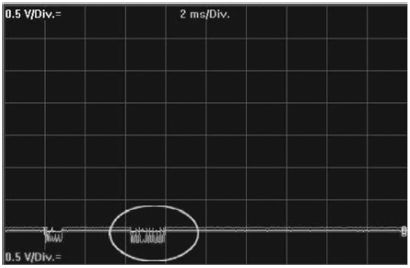
can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數據通信協議,廣泛用于汽車、航空、船舶、工業自動化、機器人等領域。CAN總線采用串行通信方式,主要用于實現多個模塊之間的通信
2023-09-14 16:48:053603 CAN H 電壓也被置于12V。CAN L 對電源短路的總線波形如下圖所示。 實際測量CAN導線的電壓,若CAN L 和CAN H 導線電壓都約為12V,則說明出現此類故障。 故障原因:如果不是CAN L 導線對外部電源短路引起的,那么這種故障就有可能是控制模塊內部的CAN收發器損壞造成的。故障查找
2023-09-14 16:57:081113 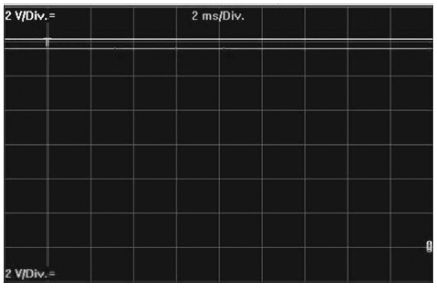
,扳動了哪個開關,這對快速查找故障十分有利。確認是電氣故障后,參閱設備的電氣原理圖、有關技術說明書進行電路分析,大致估計有可能發生故障的部位。如果遇到的是復雜電路,應采取分成若干個單元,逐個進行分析判斷的辦
2023-09-15 14:16:29747 怎么用示波器看can總線信號?? CAN總線是一種高速、可靠的控制器局域網絡,常被用于汽車、航空等領域。在調試和故障排查時,我們可以使用示波器來監測CAN總線的信號。以下是如何使用示波器來看CAN
2023-10-11 17:19:303258 汽車CAN總線關閉故障發生時,應分析物理層包括CAN線路、CAN控制器及收發器、CAN信號干擾等外在因素,同時分析CAN寄存器及軟件處理,重新初始化CAN驅動和恢復正常后,定時嘗試往外發送報文。
2023-10-16 15:36:13702 
_L 之差為 2.5V 左右。而隱性電平對應邏輯 1,CAN_H 和 CAN_L 之差為0V。隱形電平具有包容的意味,只有所有的單元都輸出隱性電平,總線上才為隱性電平(顯性電平比隱性電平更強)。 CAN總線是采用NRZ(Non-Return to Zero)方法進行通訊的,這種通信有一種不好的地方,就
2023-10-27 14:55:281008 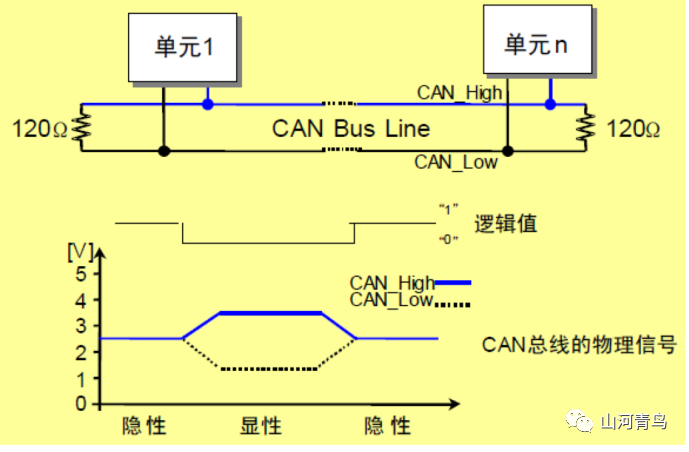
CAN總線舵機的特性、控制方法以及常見故障
2023-10-21 09:53:050 CAN總線通訊協議由德國博世于上世紀80年代發明,第一個使用CAN總線通訊協議的量產車型是1991年的奔馳S級轎車,至今CAN總線依舊是車內主要的通訊總線。隨著汽車電子智能化加速,CAN總線也開始
2023-12-21 14:03:45663 
CAN總線共模電感是應用于CAN總線通信中的一種電子元件,用于解決CAN總線通信中的共模干擾問題。本文將詳細介紹CAN總線共模電感的定義、作用、選型要點以及常見注意事項,并且結合實際案例進行分析
2024-01-05 13:42:34748 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見的CAN總線類型。它們在數據傳輸速率、最大電纜長度、適用場景等方面存在一些差異。下面將詳盡、詳實、細致地介紹這兩種CAN
2024-01-31 14:09:01497 CAN總線的節點可能會出現故障,導致整個系統運行不正常。在本文中,將詳細介紹三種常見的方法來找到CAN總線故障節點。 首先,使用故障碼掃描儀是找到CAN總線故障節點的一種常見方法。故障碼掃描儀是一種專門檢測車輛故障的工具,可以連接到
2024-02-02 10:35:10457 CAN總線系統故障診斷的步驟、方法、注意事項? CAN總線系統故障診斷是指對CAN總線系統中出現的故障進行分析、定位和排除的過程。本文將以詳盡、詳實和細致的方式介紹CAN總線系統故障診斷的步驟、方法
2024-02-03 11:31:191116 淺談船舶電氣接地故障的查找及解決方法 張穎姣 江蘇安科瑞電器制造有限公司江蘇江陰214405 摘要:隨著現代船舶電氣自動化水平的日益提高,對船舶電力系統供電的安全性和可靠性提 出了更加嚴格的要求
2024-03-14 10:20:4961 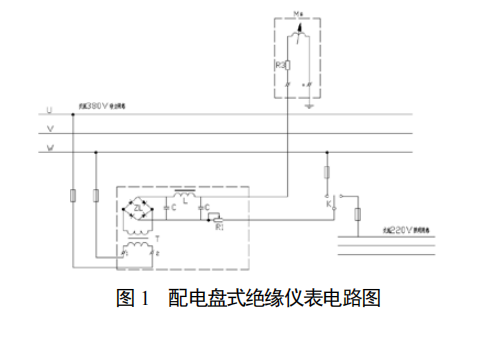
正在加载...
 電子發燒友App
電子發燒友App

















 工商網監
工商網監
評論