自動駕駛技術迅速發(fā)展,車輛中的CAN總線已經(jīng)無法滿足數(shù)據(jù)吞吐量和傳輸速度的要求,CAN總線的加速升級版——CAN FD技術正在逐漸替代現(xiàn)有網(wǎng)絡。為了進一步了解CAN FD,本文將從產(chǎn)品的實際應用介紹CAN FD的升級及優(yōu)勢。
2018-09-20 09:31:40 8551
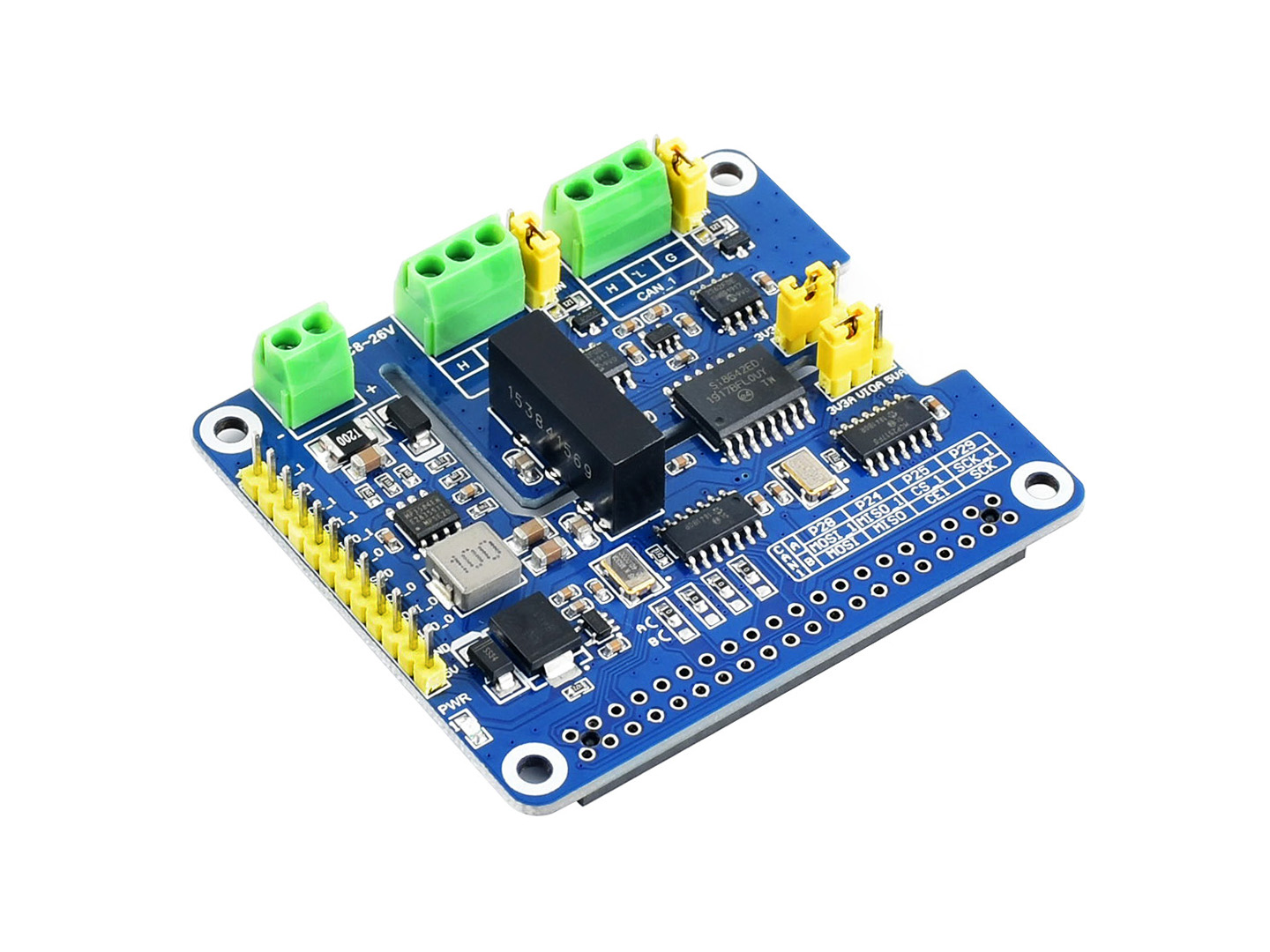
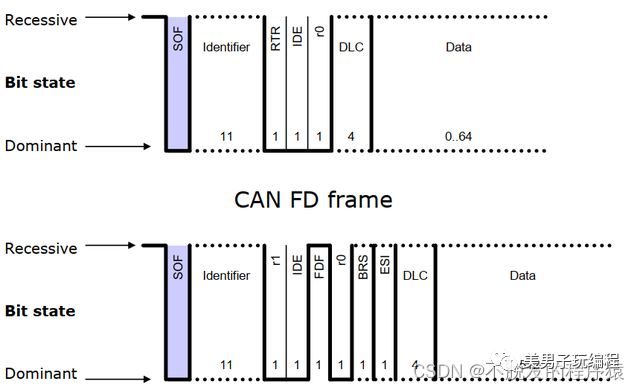
8551 ,根據(jù)協(xié)議和通信速度的不同分為CAN和CAN FD系統(tǒng)。CAN的通信速度在500Kbps,CAN FD最高可以達到8Mbps。 ? 兩種系統(tǒng)均使用屏蔽雙絞線通信,均為差動電壓。在數(shù)據(jù)長度上CAN只能
2022-04-25 07:52:004473 CAN FD(CAN with Flexible Data-Rate)協(xié)議繼承了CAN總線的主要特性,提高了CAN總線的網(wǎng)絡通信帶寬,改善了錯誤幀漏檢率,同時可以保持網(wǎng)絡系統(tǒng)大部分軟硬件特別是物理層不變。這種相似性使ECU供應商不需要對ECU的軟件部分做大規(guī)模修改即可升級汽車通信網(wǎng)絡。
2017-02-22 17:44:5728364 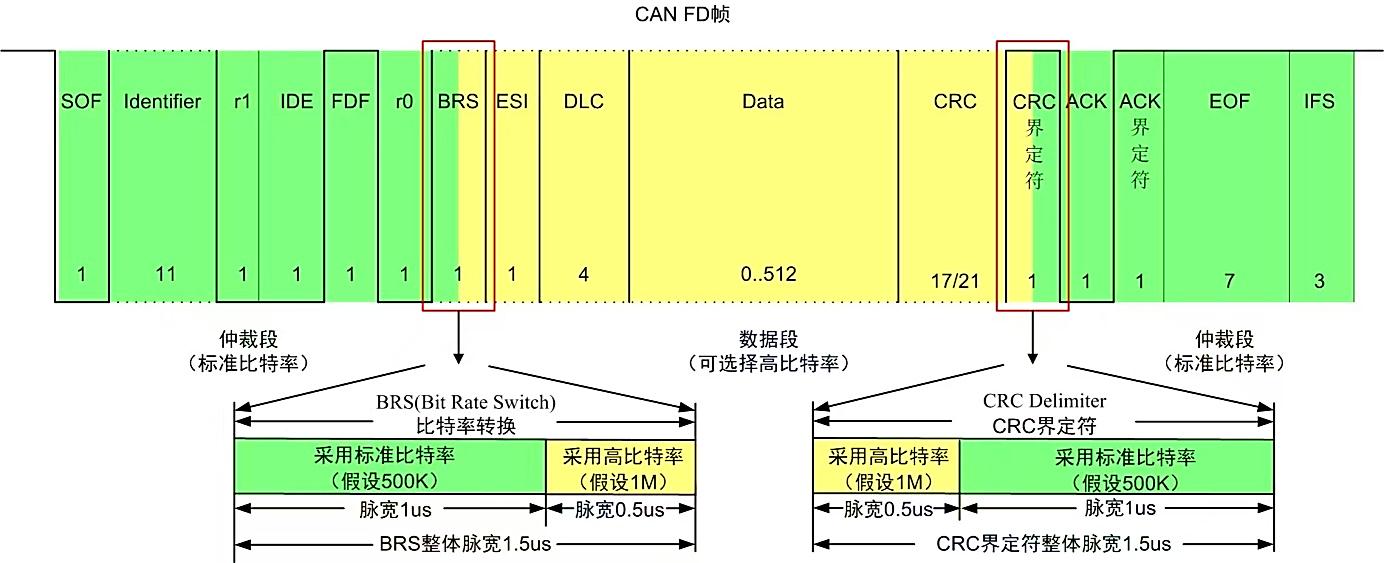
隨著汽車電子、工業(yè)自動化的蓬勃發(fā)展,CAN總線上的設備數(shù)量、數(shù)據(jù)量都大大增加,給CAN總線帶來的極大的挑戰(zhàn)。為滿足更高的帶寬及數(shù)據(jù)吞吐量,CAN FD(CAN with Flexible Data-Rate)誕生了。
2017-10-18 17:38:1490781 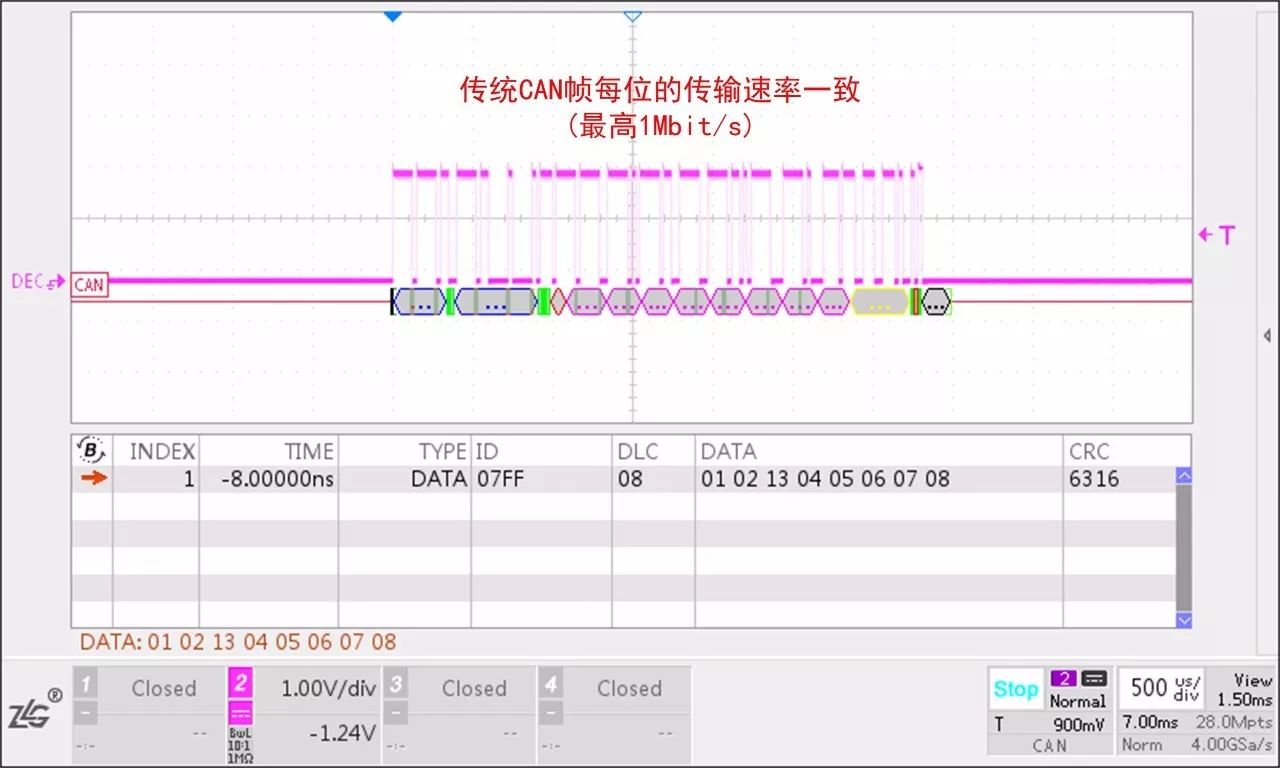
眾所周知,CAN FD是基于CAN 2.0的升級版協(xié)議,為了滿足汽車電子日益增長的高帶寬和高傳輸速率的要求,CAN FD主要升級了以下幾個方面:
2018-08-22 17:55:0212671 眾所周知CAN FD是CAN 2.0的升級協(xié)議,也是汽車電子行業(yè)未來發(fā)展的主要趨勢,那CAN FD到底能跑多快呢?
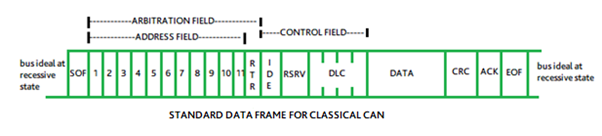
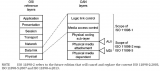
2018-09-17 10:01:5915260 假期更新了一文搞懂CAN總線協(xié)議幀格式,CAN FD總線協(xié)議怎能錯過?本篇博文將講解CAN FD總線協(xié)議幀格式。
2022-10-14 12:49:532681 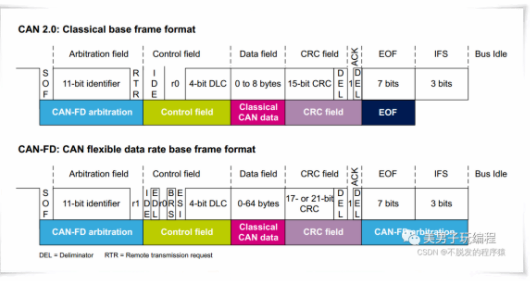
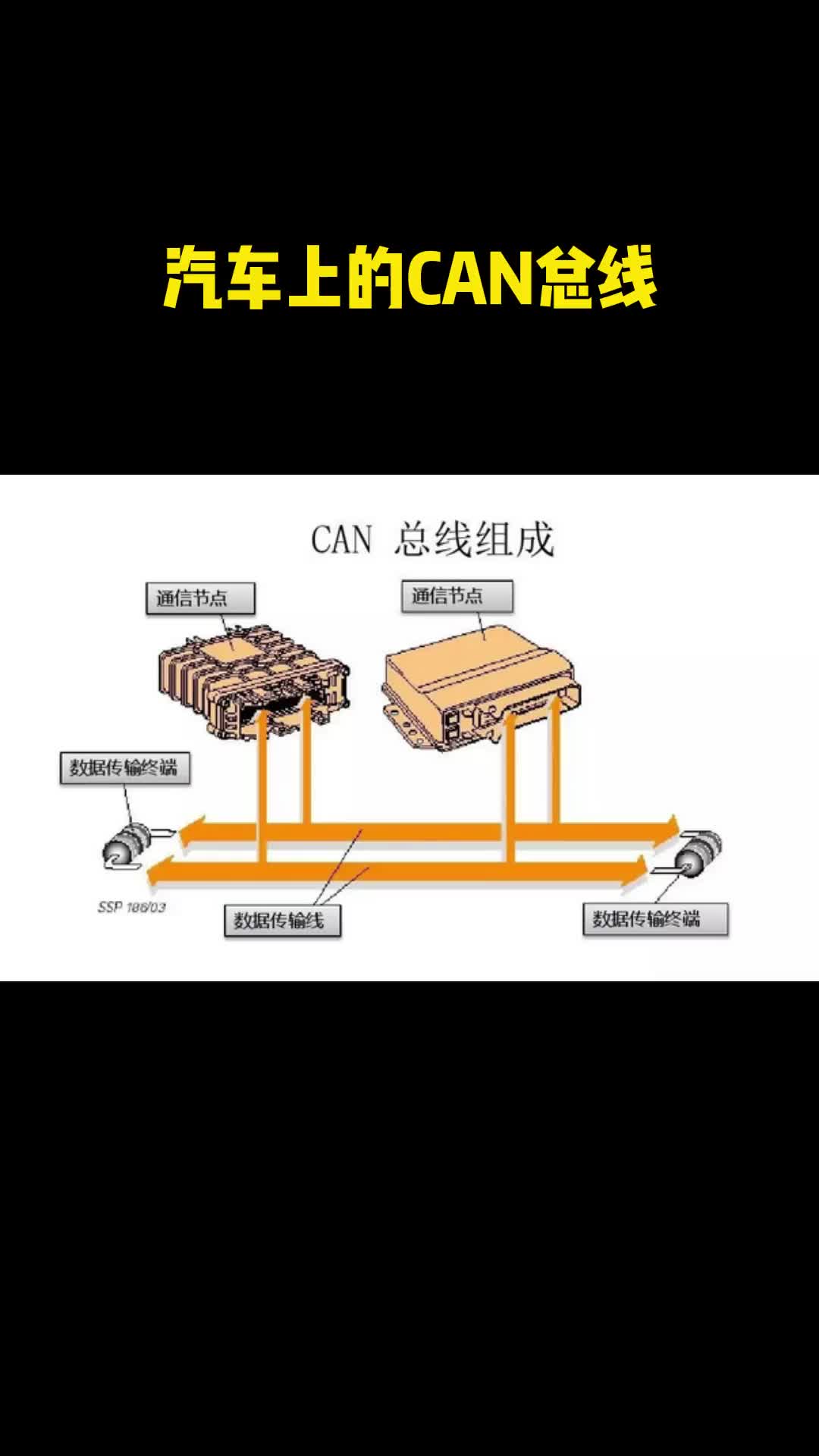
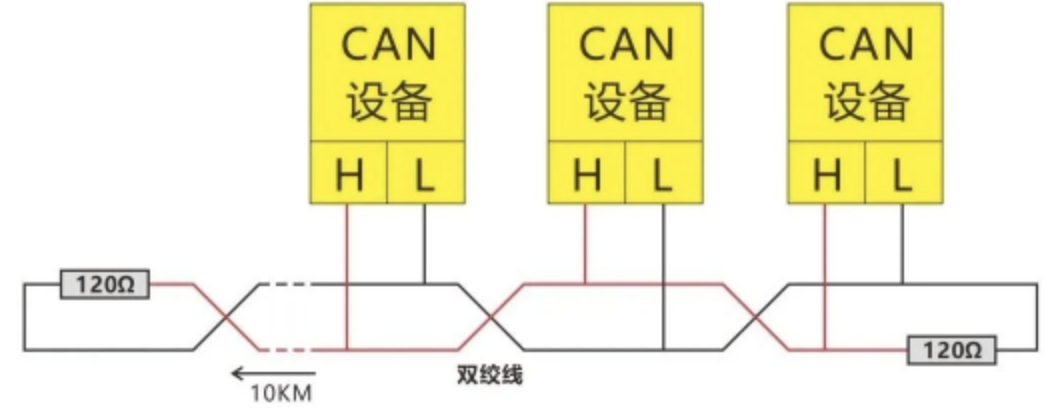
在ISO 11898-2和ISO 11898-3中分別規(guī)定了兩種CAN總線結(jié)構(在BOSCH CAN2.0規(guī)范中,并沒有關于總線拓撲結(jié)構的說明):高速CAN總線和低速CAN總線,區(qū)別表如下所示。
2023-04-07 09:30:181837 
應用指南—如何使用DSLogic分析CAN/CAN-FD 信號?
2023-09-04 14:15:561121 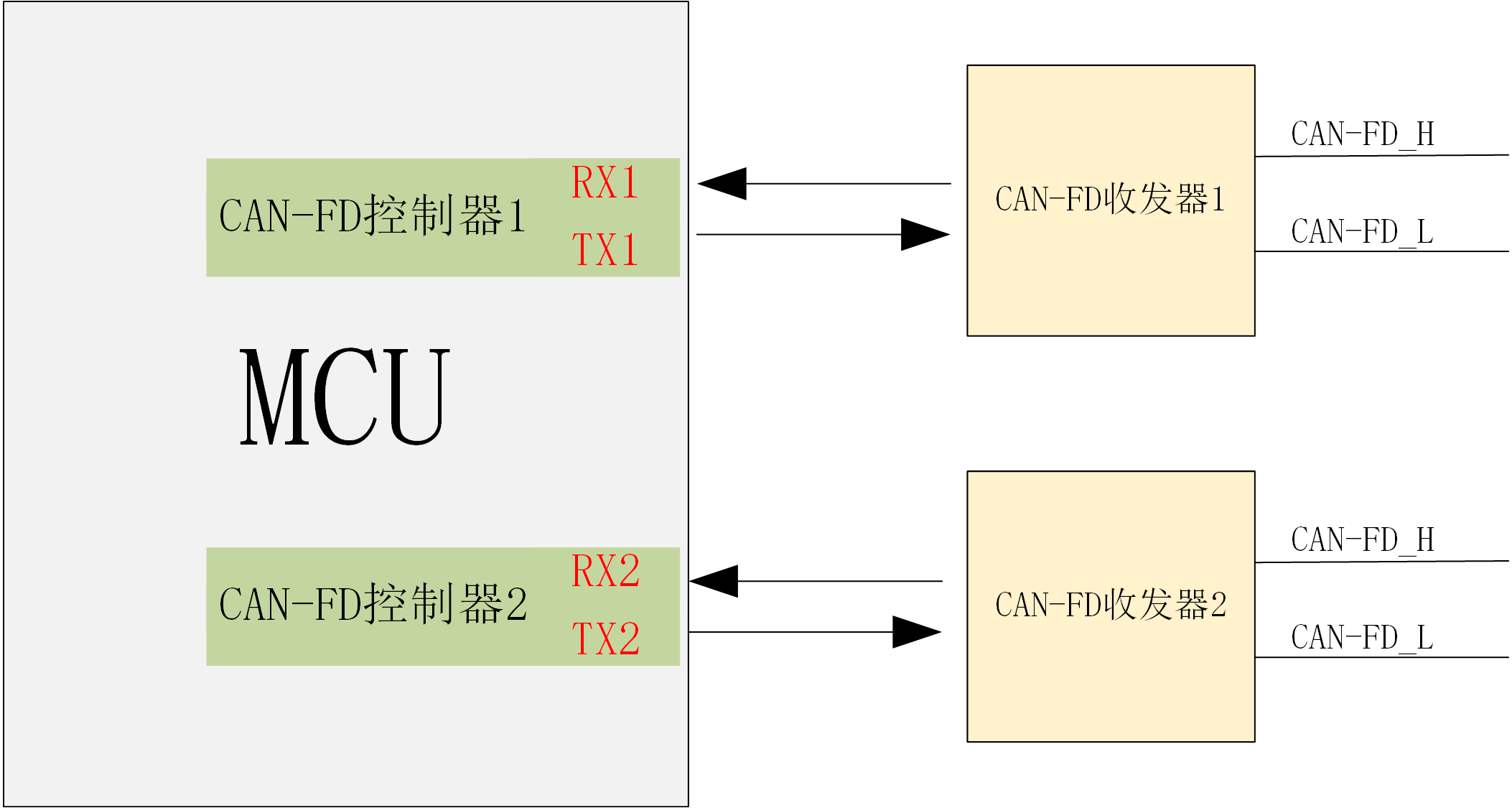
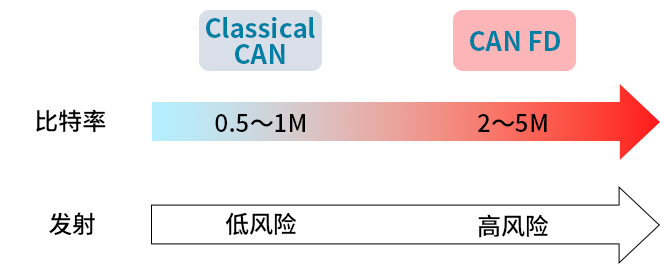
CAN FD協(xié)議是CAN-BUS協(xié)議的最新升級,其將CAN的每幀8字節(jié)數(shù)據(jù)提高到64字節(jié),波特率從最高的1Mbps提高到8Mbps~15Mbps,使得通訊效率提高8倍以上,大大提升了車輛的通訊效率
2023-09-06 10:33:53220 
這意味著變送器通過CAN收發(fā)器改變總線電平,并將其信息傳輸?shù)?b class="flag-6" style="color: red">CAN總線。接收器通過監(jiān)測總線電平將總線上的信息讀取到自己的CAN收發(fā)器中。
2024-02-19 14:53:54613 
隨著CAN FD需求的加大,在SBC中集成該總線協(xié)議的功能成為一個具有商業(yè)價值的選項。
2019-06-21 11:08:001880 CAN FD到底是什么意思?全雙工?頻域?還是消防局?都不是,實際上它是 CAN 領域的最新技術,FD 代表 Flexible Data-rate(靈活數(shù)據(jù)速率),幾年前由博世公司的一篇白皮書引入該
2022-11-22 07:36:19
CAN FD(CAN with flexible data-rate)是CAN2.0協(xié)議的擴展,CAN-FD由博世開發(fā),并由 ISO 11898-1:2015標準化。一、CAN FD協(xié)議介紹1
2021-08-20 06:51:10
我們已經(jīng)圍繞 CAN 總線 2.0 開發(fā)了我們的控制系統(tǒng),但我們正試圖升級到 H7,但它只有 CAN FD。問題是,CAN 總線 FD 是否可以配置為像 CAN 總線 2.0 一樣運行?
2022-12-16 07:27:08
前言CAN總線的應用在現(xiàn)在看來越來越廣泛,我廠設備從最初的ARM9與ARM7平臺、期間升級過度到CortexA8與Cortex M3平臺,再到現(xiàn)在的Cortex M4平臺,圍繞CAN進行了一系列
2021-07-27 06:18:35
使用的CAN2517FD有所區(qū)別,僅供參考),主要體現(xiàn)在數(shù)據(jù)鏈路層這一部分。應用程序,具體表現(xiàn)在控制器以不同的通信方式、MCP2517FD提供的相應指令集和指令集格式對CAN2517FD的寄存器進行讀寫操作,進而實現(xiàn)相應的功能。具體可參考:CAN總線數(shù)據(jù)鏈路層分析(四) 二、CAN
2021-08-19 06:47:56
“本文介紹MCU通過SPI串口擴展CAN/CAN FD接口擴展方案,該方案基于MCP2518FD+ATA6563,可快速部署應用于實際項目。”1.CAN FD和CAN 2.0的區(qū)別CAN FD解決了
2021-11-04 07:02:29
上相較于車載以太網(wǎng)更易實現(xiàn)和應用,且由于CAN-FD與傳統(tǒng)CAN對物理層的要求基本一致,CAN-FD的 ECU 和收發(fā)器對傳統(tǒng)CAN兼容,OEM不論是采用直接升級為CAN FD總線的方案還是在切換
2023-02-14 14:22:23
,OptoLyzer MOCCA系列一定能助整個開發(fā)流程一臂之力。本文中,我們重點介紹OptoLyzer MOCCA FD,這是一款用于CAN FD、CAN和LIN的開發(fā)工具。除了硬件外,我們還將討論面向
2019-07-22 08:06:10
產(chǎn)業(yè)的發(fā)展,各種傳感器和控制器數(shù)量的增多,總線上的數(shù)據(jù)量也激增,這使得CAN2.0總線在傳輸速率和帶寬方面的缺點暴露的更加明顯,于是就誕生了CAN-FD。CAN-FD在傳輸速率和帶寬方面有了明顯的提升
2023-02-17 15:37:17
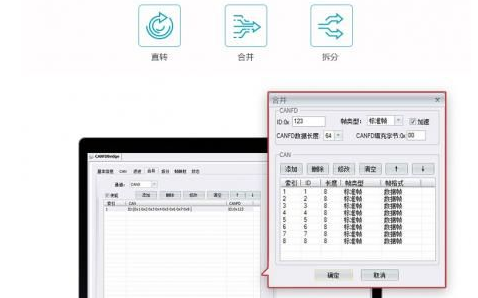
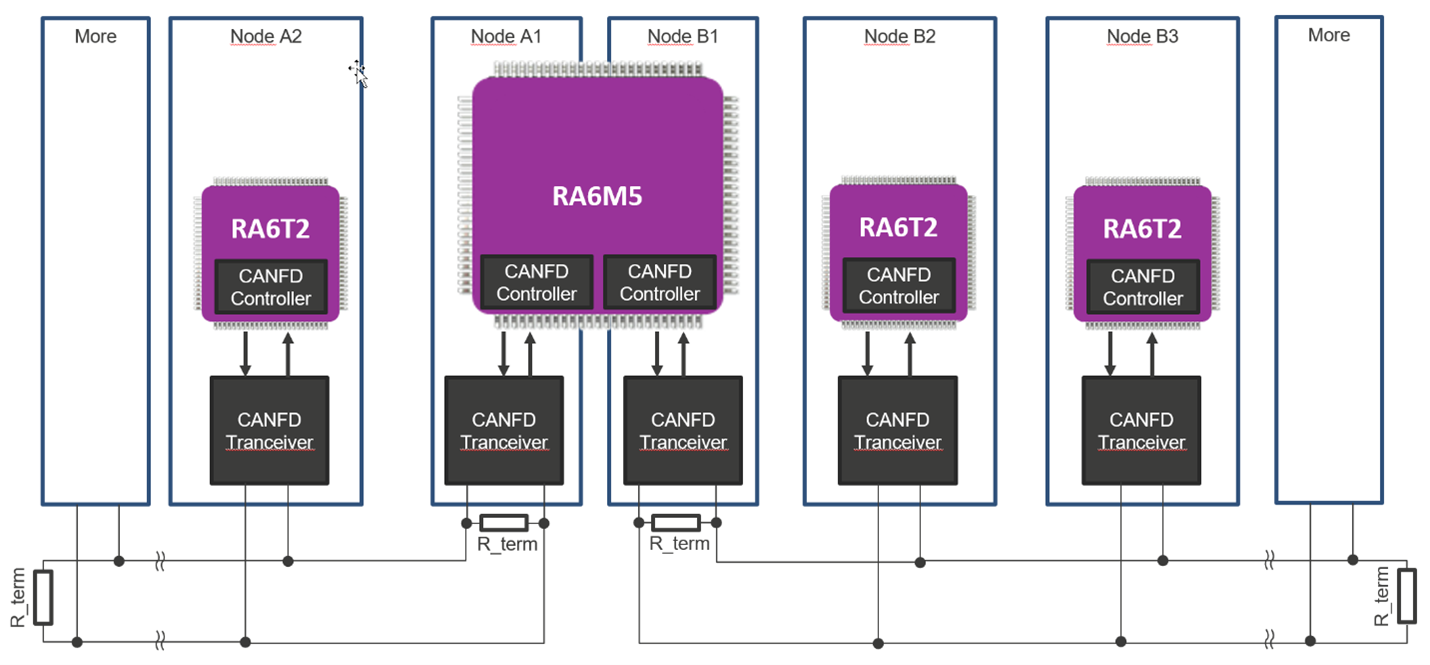
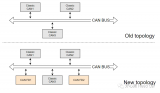
FD的64字節(jié)長度的互相轉(zhuǎn)換,無損還原原有數(shù)據(jù)。總結(jié):對于CAN FD的升級,如果不是全部節(jié)點都進行升級,那么為了避免與CAN總線的沖突,相對來說,使用CAN網(wǎng)橋作為轉(zhuǎn)換來完成是更好的方法。工程師可以
2019-05-29 17:45:36
節(jié)點的時序,在這兩個節(jié)點需要能夠互相檢測時,其就會同時開始通信。這就引出了雙程延遲要求。CAN FD 協(xié)議可消除數(shù)據(jù)階段的雙程延遲要求,實現(xiàn)更高的二級比特率。網(wǎng)絡及物理層上 FD 數(shù)據(jù)階段的約束是總線
2018-09-17 15:56:34
FD 網(wǎng)絡,電氣隔離最大為500V,分離PC和CAN總線。方便攜帶和小巧的塑料外殼使該款適配器特別適用于移動應用。 &n
2022-05-19 18:25:01
產(chǎn)品應用PCAN-USB Pro FD 適配器可經(jīng)由 USB 把一臺電腦輕松連接到 CAN FD 和 LIN 網(wǎng)絡。可同時連接 2 種現(xiàn)場總線,用相應的電纜(2 路 CAN FD、2 路 LIN)可
2022-06-15 16:33:16
關鍵詞 RS-485、LM3S2016、CAN總線摘要 CAN總線現(xiàn)場總線應用方案 RS-485升級到CAN
2009-11-07 14:14:22 38
38 CAN-bus 現(xiàn)場總線應用方案RS485 升級到CAN
2017-01-08 14:27:4934 Microchip日前宣布,開始提供業(yè)界第一款外部CAN靈活數(shù)據(jù)速率(CAN FD)控制器。采用MCP2517FD,設計人員能夠很快從CAN 2.0升級到CAN FD,受益于CAN FD增強協(xié)議。
2017-10-19 06:31:0019442 CAN總線是一種基于優(yōu)先級的串行通信網(wǎng)絡,采用載波監(jiān)聽多路轉(zhuǎn)換沖突避免協(xié)議,CAN總線中傳輸?shù)臄?shù)據(jù)幀的起始部分為數(shù)據(jù)的標識符,標識符可以區(qū)分消息又可以表示消息的優(yōu)先級(0 的優(yōu)先級最高)。
2018-04-24 17:48:1619009 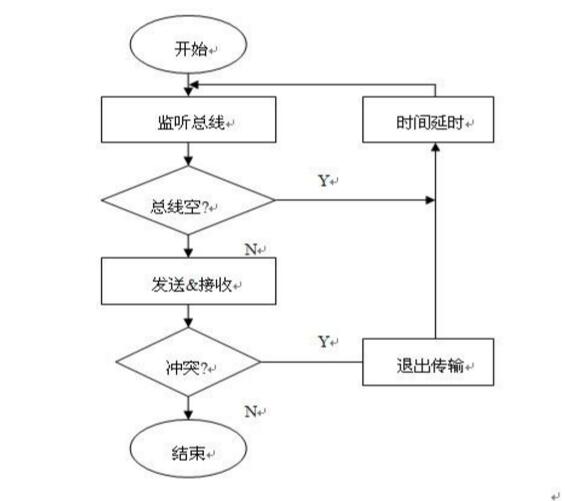
MCP25612FD是Microchip公司的第二代雙CAN FD收發(fā)
器。它通過兩個完全獨立的MCP2561FD CAN收發(fā)器提
供所有功能(SPLIT引腳除外)。它還能保證環(huán)回延遲
對稱,以支持CAN FD所需的更高數(shù)據(jù)速率。最大傳播
延時也得到進一步改善,能夠支持更長的總線。
2018-06-27 15:24:0012 前言 CAN總線的應用在現(xiàn)在看來越來越廣泛,我廠設備從最初的ARM9與ARM7平臺、期間升級過度到CortexA8與Cortex M3平臺,再到現(xiàn)在的Cortex M4平臺,圍繞CAN進行了一系列
2018-06-13 11:16:18332802 Data-Rate,翻譯為【可變速率的CAN】。在經(jīng)典CAN的基礎上增加傳輸速率,數(shù)據(jù)域可傳輸64Byte,也就是可變速的功能,簡單的來說就是CAN的升級版。 CAN-FD它繼承了 CAN 總線
2018-07-09 11:53:5910987 最近越來越多工程師關注CAN FD,同時也會向虹科反饋CAN FD的產(chǎn)品應用信息。覺得對于CAN FD的發(fā)布,對于中國的工程師或者是中國對CAN技術的應用將會迎來新的契機。試想,國外累計了20多年
2020-01-16 08:06:0020987 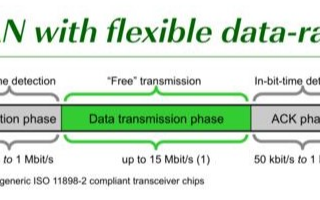
自動駕駛技術迅速發(fā)展,車輛中的CAN總線已經(jīng)無法滿足數(shù)據(jù)吞吐量和傳輸速度的要求,CAN總線的加速升級版——CAN FD技術正在逐漸替代現(xiàn)有網(wǎng)絡,為了進一步了解CAN FD,本文將從產(chǎn)品的實際應用介紹CAN FD的升級及優(yōu)勢。
2018-09-19 16:56:0312522 本文說的CAN即是一種總線,也是一種協(xié)議。因此,我們常聽見CAN總線,也常聽見CAN協(xié)議。CAN協(xié)議和CANOpen協(xié)議是兩套不同的協(xié)議。從軟硬件層次來劃分,CAN協(xié)議屬于硬件協(xié)議,而CANOpen
2018-10-03 19:53:0073333 
CAN FD的七個技術問題資料總結(jié)包括了:1.CAN FD的數(shù)據(jù)幀格式變化?2.CAN FD與CAN的區(qū)別?3.CAN FD數(shù)據(jù)長度擴充?4.CAN FD與CAN的兼容問題?5.CAN FD CRC
2018-09-27 08:00:0028 隨著工業(yè)2025的推進,現(xiàn)在自動化機械臂控制全面由傳統(tǒng)CAN 9600-115200波特率升級CAN2.0 1M乃至CAN-FD 4M高速協(xié)議,工業(yè)自動化機械臂多節(jié)點于工程布線時采用CAN2.0(或以上)總線通信,電腦控制端俗稱上位機與多個CAN收發(fā)節(jié)點實時雙工通信。
2019-01-17 09:35:004835 CAN FD允許最大64字節(jié)數(shù)據(jù)幀,并且數(shù)據(jù)段部分的傳輸速率高達5Mbit/s。那么,CAN FD升級之后,通訊距離是否會縮短呢?
2019-05-07 11:12:266931 
以往,在升級至或擴展CAN FD功能時,設計師不得不在其設計中整合多個分立的組件或徹底修改微控制器,不僅耗時,而且成本高昂。為此,TI公司推出了新款汽車系統(tǒng)基礎芯片(SBC)TCAN4550-Q1
2019-07-02 08:41:317298 英飛凌針對眾多總線協(xié)議提供內(nèi)容豐富的產(chǎn)品組合,這些總線協(xié)議包括CAN FD、支持局部網(wǎng)絡的CAN、高速CAN、LIN和FlexRay等。針對數(shù)據(jù)傳輸速率達到5Mbit/s的協(xié)議變體CAN FD
2019-09-24 17:30:4013934  電子發(fā)燒友App
電子發(fā)燒友App
























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論