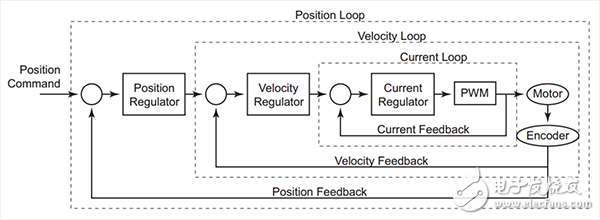
【不懂就問】伺服電機(jī)的控制,典型分為三個(gè)環(huán),位置環(huán)、速度環(huán)、電流環(huán)其中涉及的一個(gè)控制參數(shù)“位置前饋增益”怎么理解
2018-07-24 08:41:25
伺服電機(jī)控制器為何要整定?何時(shí)需要整定?
2021-09-29 06:11:22
伺服電機(jī)控制器與步進(jìn)電機(jī)控制器有啥不一樣?
2021-02-25 07:42:10
模式。當(dāng)負(fù)載慣量已知時(shí),由用戶輸入目標(biāo)剛性和慣量律,系統(tǒng)自動(dòng)整定參數(shù)。負(fù)載變化范圍不能太大。:伺服電機(jī)控制器的參數(shù)整定翻譯自 SureServo Manual
2018-11-01 11:14:10
翻譯自 SureServo Manual,Chapter 5整定的目的:為何整定?何時(shí)需要整定???從本質(zhì)上來說,伺服系統(tǒng)的工作就是將指令輸入和輸出的誤差減小到零。而將誤差減小到零試圖花費(fèi)多大
2021-06-28 07:41:32
實(shí)驗(yàn)11伺服電機(jī)控制器設(shè)計(jì)實(shí)驗(yàn)了解伺服電機(jī)的應(yīng)用領(lǐng)域,掌握伺服電機(jī)的速度控制模式、伺服電機(jī)的位置控制模式。文章目錄程序設(shè)計(jì)伺服電機(jī)的速度控制模式代碼講解main.ctimer.c伺服電機(jī)的位置控制
2021-06-28 08:59:56
最近在用松下伺服電機(jī)。它的自整定效果真的不錯(cuò)。只需要輸入剛性,就可以自己整定參數(shù)了。包括負(fù)載慣量。
我自己也做電機(jī)控制器之類的東西。但是僅限于電流環(huán)速度環(huán)位置環(huán)仨pid就完事了。不太理解慣量這個(gè)參數(shù)
2023-07-31 15:39:42
伺服電機(jī)是否必須有對應(yīng)的伺服驅(qū)動(dòng)器來控制?沒有伺服驅(qū)動(dòng)器能使用伺服電機(jī)嗎?怎么控制?首次接觸,不懂
2023-12-15 07:49:19
采用單片機(jī)控制脈沖輸出驅(qū)動(dòng)伺服電機(jī),為何伺服電機(jī)轉(zhuǎn)過一定的角度之后不再轉(zhuǎn)了,講將其反接又反轉(zhuǎn)一定的角度后又不轉(zhuǎn)了。求高人指點(diǎn),謝了!
2011-08-12 19:51:55
伺服驅(qū)動(dòng)器與伺服電機(jī)怎么連接?如何實(shí)現(xiàn)伺服驅(qū)動(dòng)器的基本控制?
2021-09-28 08:29:01
控制性能好:采用全數(shù)字伺服控制算法,PID參數(shù)自整定功能,可以控制電機(jī)的轉(zhuǎn)速,轉(zhuǎn)向,力矩,位置,以及制動(dòng);可實(shí)現(xiàn)速度、電流、位置等多種閉環(huán)控制方式;調(diào)速范圍寬,在5rpm~8000rpm的轉(zhuǎn)速范圍內(nèi)保持
2011-05-11 09:30:05
在實(shí)際使用電機(jī)驅(qū)動(dòng)器控制電機(jī)的時(shí)候,PID的整定方法采用實(shí)驗(yàn)中的試湊法,但是電機(jī)的響應(yīng)曲線怎么獲得?
2016-11-17 17:45:25
本帖最后由 cmbd 于 2022-2-17 11:22 編輯
想寫一個(gè)上位機(jī)軟件來監(jiān)視及控制電機(jī)控制器的啟動(dòng)、停止,及相關(guān)參數(shù)寫入和讀取,但拿到這個(gè)通訊協(xié)議,競?cè)煌耆床欢魑恢附蹋x謝!附件為通訊協(xié)議。比如我想對控制器寫入電機(jī)正轉(zhuǎn)(前進(jìn)模式),我該發(fā)送什么樣的報(bào)文給控制器呢?
2016-12-26 22:02:14
雙閉環(huán) 外環(huán)是速度環(huán)內(nèi)環(huán)是電流環(huán)在整定電流環(huán)PI參數(shù) 主要是通過示波器觀察什么怎么確定調(diào)節(jié)的參數(shù)可以用
2014-03-11 00:32:48
最近在研究BBBlack控制電機(jī)方面的問題,發(fā)現(xiàn)論壇高手寫的都是用板上的pwm引腳控制脈寬來控制電機(jī)轉(zhuǎn)速或2燈亮的程度,但是有沒有哪位高手知道如何控制伺服電機(jī)轉(zhuǎn)一定的角度(比如我想讓電機(jī)轉(zhuǎn)30度)。該怎么實(shí)現(xiàn)?是通過定時(shí)器嗎?
2017-09-26 19:54:55
【Simulink】FOA優(yōu)化算法整定PID控制器參數(shù)(五)—— 一階帶時(shí)延的被控對象目錄【Simulink】FOA優(yōu)化算法整定PID控制器參數(shù)(五)—— 一階帶時(shí)延的被控對象0研究背景1研究背景2
2021-08-30 06:46:44
PID-PID控制器參數(shù)整定與實(shí)現(xiàn)
2020-05-12 11:30:36
簡單、穩(wěn)定性好、工作可靠、調(diào)整方便而成為工業(yè)控制的主要技術(shù)之一。當(dāng)被控對象的結(jié)構(gòu)和參數(shù)不能完全掌握,或得不到精確的數(shù)學(xué)模型時(shí),控制理論的其它技術(shù)難以采用時(shí),系統(tǒng)控制器的結(jié)構(gòu)和參數(shù)必須依靠經(jīng)驗(yàn)和現(xiàn)場調(diào)試
2017-12-21 14:18:13
參數(shù)整定 1、P參數(shù)整定 需要看的曲線有:NowVal、TargetVal、PIDout、Pout。 先慢慢增大P,增大到振蕩,又減小回來至不震蕩,P最好小一點(diǎn),在只有P調(diào)節(jié)時(shí),輸出不能有振蕩
2020-06-23 14:54:44
PID參數(shù)的意義與整定方法資料
2015-07-31 09:17:31
PID溫度控制參數(shù)整定的方法是什么?
2021-11-22 06:13:41
]。現(xiàn)代數(shù)控機(jī)床通常采用三相永磁同步電動(dòng)機(jī)為驅(qū)動(dòng)電機(jī)的交流伺服系統(tǒng)。由于交流電機(jī)的復(fù)雜性和耦合的非線性,如何快速、準(zhǔn)確地整定PID 控制器參數(shù)仍然沒有一個(gè)行之有效的方法。粒子群優(yōu)化(particle
2009-05-17 11:38:44
SLPC可編程調(diào)節(jié)器PID控制參數(shù)整定[hide][/hide]
2017-03-14 15:14:23
如何去實(shí)現(xiàn)STM32電機(jī)的PID參數(shù)整定?如何去編寫STM32電機(jī)的PID參數(shù)整定的代碼?
2021-09-23 08:07:13
TMCM1636伺服驅(qū)動(dòng)控制器有何功能?TMCM1636伺服驅(qū)動(dòng)控制器有哪些應(yīng)用?
2021-10-08 08:32:46
申請理由:之前公司使用的28034,現(xiàn)在想用一個(gè)新片子用于雙電機(jī)控制項(xiàng)目描述:控制一個(gè)伺服電機(jī)與一個(gè)步進(jìn)電機(jī),通過六路pwm控制伺服電機(jī),八路pwm控制步進(jìn)電機(jī),用于縫紉機(jī)控制器。
2015-09-10 11:12:20
【實(shí)驗(yàn)】SLPC可編程調(diào)節(jié)器PID控制參數(shù)整定[hide][/hide]
2017-03-05 10:54:11
本文主要介紹PID參數(shù)的作用原理,參數(shù)整定的經(jīng)典計(jì)算方法,通過看曲線整定PID參數(shù)的方法,串級控制、純滯后對象。回復(fù)帖子查看資料下載鏈接:[hide][/hide]
2021-08-05 10:10:47
,解決內(nèi)部參數(shù)攝動(dòng)和外部負(fù)載擾動(dòng)對系統(tǒng)影響的問題,提出一種永磁同步電機(jī)模糊自整定自適應(yīng)積分反步控制方法。將dq軸電流誤差積分項(xiàng)引入自適應(yīng)反步控制器控制律中,構(gòu)成自適應(yīng)電流誤差積分反步控制器,實(shí)現(xiàn)對dq軸電流給定的精確跟蹤,提高dq軸電流控制系統(tǒng)對內(nèi)部參數(shù)攝動(dòng)的魯棒性。在此基礎(chǔ)上,設(shè)計(jì)模糊推理模塊,應(yīng)
2021-08-27 07:31:45
為什么用PLC控制伺服控制器一給使能電機(jī)就轉(zhuǎn)(此時(shí)PLC還沒運(yùn)行呢),控制器和電機(jī)都已經(jīng)測試好了
2023-12-11 07:00:33
一直以來,關(guān)于PID整定都在進(jìn)行手動(dòng)調(diào)試,例如試湊法、1/4衰減曲線法、齊格勒-尼柯爾斯整定法等; 雖然上述方法都可以完成對參數(shù)的整定,但是需要非常豐富的調(diào)試經(jīng)驗(yàn)才能達(dá)到預(yù)期的目的。同時(shí),當(dāng)需要控制
2021-08-31 08:41:30
作者:唐國豐在我的上一篇文章《低壓系統(tǒng)第一個(gè)斷路器的參數(shù)設(shè)計(jì)》中探討的是斷路器的極限分?jǐn)嗄芰Φ倪x型和接地故障保護(hù)電流的計(jì)算,后來在其它刊物發(fā)表這篇文章的時(shí)候,我將文章的名稱改為《數(shù)據(jù)中心斷路器整定值
2021-09-14 06:55:36
這種情況是怎么回事;求教下相關(guān)PID參數(shù)整定方法,涉及到溫度控制方面的。另外通過Autotunning PID參數(shù)調(diào)出PID整定向?qū)В?b class="flag-6" style="color: red">整定出來的參數(shù)在控制過程中,效果也不太好。
2015-05-05 16:20:33
PID參數(shù)整定有什么作用?分享一些基于直流電機(jī)調(diào)速平臺(tái)的PID參數(shù)整定經(jīng)驗(yàn)
2021-06-30 06:42:04
(FIS Toolbox)與LabVIEW虛擬儀器開發(fā)軟件集成,研制出模糊參數(shù)自整定PID虛擬控制器,并實(shí)現(xiàn)了對非線性系統(tǒng)的實(shí)時(shí)測控。2 Fuzzy-PID控制策略 模糊參數(shù)自整定PID控制器以系統(tǒng)
2019-04-17 09:40:02
你好,我正在為PMSM設(shè)計(jì)控制器,我有一個(gè)問題,在長時(shí)間運(yùn)行期間,控制器如何適應(yīng)PMSM的電機(jī)參數(shù)變化?
2024-01-22 06:35:44
目前伺服控制器的設(shè)計(jì)多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會(huì)大打折扣,因此以FPGA為控制核心,對應(yīng)用于機(jī)載三軸伺服控制平臺(tái)的控制器進(jìn)行了設(shè)計(jì)與優(yōu)化。
2019-07-16 07:41:04
如何推定驅(qū)動(dòng)器的慣量比?如何根據(jù)驅(qū)動(dòng)器的波形圖來整定參數(shù)減小誤差呢?
2021-10-08 06:35:49
零漂在閉環(huán)控制過程中,零漂的存在會(huì)對控制效果有一定的影響,最好將其抑制住。使用控制卡或伺服上抑制零飄的參數(shù),仔細(xì)調(diào)整,使電機(jī)的轉(zhuǎn)速趨近于零。由于零漂本身也有一定的隨機(jī)性,所以,不必要求電機(jī)轉(zhuǎn)速絕對為零
2015-12-29 11:12:23
伺服驅(qū)動(dòng)器和伺服電機(jī)的接線方法是什么?伺服驅(qū)動(dòng)器如何進(jìn)行參數(shù)配置?如何通過PLC控制伺服電機(jī)的正反轉(zhuǎn)及定長控制?
2021-09-29 08:38:16
論上可以證明,對于過程控制的典型對象──“一階滯后+純滯后”與“二階滯后+純滯后”的控制對象,PID控制器是一種最優(yōu)控制。PID調(diào)節(jié)規(guī)律是連續(xù)系統(tǒng)動(dòng)態(tài)品質(zhì)校正的一種有效方法,它的參數(shù)整定方式簡便,結(jié)構(gòu)
2019-05-30 10:23:04
Modbus-RTU 通信通過Modbus-RTU 通信,僅將HMI、通過PLC、PC控制器等直接與伺服放大器連接,即可進(jìn)行PTP定位運(yùn)行、參數(shù)的編輯和各種監(jiān)控等各種各樣的運(yùn)行。富士伺服應(yīng)用事例包裝機(jī)應(yīng)用特點(diǎn)
2018-09-26 10:22:36
調(diào)節(jié)器YR-GFD和人工智能調(diào)節(jié)器YR-GND具有先進(jìn)的PID控制算法和自整定功能,使用者啟動(dòng)儀表自整定功能后,不需要人工干預(yù)就可以自動(dòng)算出最佳PID參數(shù),控制無超調(diào)和欠調(diào),PID參數(shù)還不用您手動(dòng)設(shè)置,趕緊去看看哦!!
2017-12-26 21:40:51
怎樣去整定PID的參數(shù)呢?PID參數(shù)的整定方法有哪幾種?有哪位大神遇到過這個(gè)問題
2021-07-06 06:01:03
怎樣去設(shè)計(jì)三軸伺服控制器?如何對三軸伺服控制器的性能進(jìn)行測試?
2021-04-28 06:04:11
怎樣去調(diào)試永磁同步電機(jī)FOC矢量控制中電流環(huán)PI控制器的參數(shù)?如何對Iq,Id進(jìn)行PID控制器的參數(shù)整定?
2021-09-23 09:12:48
探索伺服電機(jī)控制器電路
2019-10-16 07:49:27
轉(zhuǎn)帖用經(jīng)驗(yàn)法整定調(diào)節(jié)器參數(shù)又稱為試湊法,是廣大儀表工數(shù)十年整定經(jīng)驗(yàn)的積累,是應(yīng)用最為廣泛的一種調(diào)節(jié)器參數(shù)整定方法。它就是根據(jù)儀表工的經(jīng)驗(yàn)及控制過程的曲線形狀,直接對控制系統(tǒng)反復(fù)地、逐漸地試湊,最終
2017-11-14 09:06:47
有功阻尼整定PI參數(shù):定義的有功阻尼為:聯(lián)立轉(zhuǎn)矩方程和機(jī)械方程可以得到:導(dǎo)出有功阻尼系數(shù):與傳統(tǒng)PI調(diào)節(jié)器對比,PI的參數(shù)為電流環(huán)內(nèi)模PI控制:內(nèi)模控制就是選擇一個(gè)內(nèi)模控制器和內(nèi)模,假定內(nèi)模與電機(jī)
2021-08-27 07:54:40
哪位大神指導(dǎo)怎么用Labview進(jìn)行PID控制伺服電機(jī)?我知道現(xiàn)在的伺服電機(jī)驅(qū)動(dòng)器都有PID自整定功能。現(xiàn)在我要做的是畢業(yè)設(shè)計(jì)用上位機(jī)實(shí)現(xiàn)更高級的算法控制(滑膜控制),想先用PID試一試。問題是
2015-11-12 19:02:47
淺談增量式PID參數(shù)整定https://bbs.elecfans.com/jishu_260252_1_1.html
2012-08-18 09:50:39
怎樣去推導(dǎo)電流環(huán)PI參數(shù)的整定公式?怎樣去推導(dǎo)轉(zhuǎn)速環(huán)PI參數(shù)的整定公式?
2021-10-08 09:38:08
最近,在進(jìn)行直線電機(jī)標(biāo)準(zhǔn)伺服算法的參數(shù)整定工作,標(biāo)準(zhǔn)伺服算法中參數(shù)眾多,給整定工作帶來了不少的難度,參數(shù)與直線電機(jī)響應(yīng)之間的影響、參數(shù)與參數(shù)之間的相互影響等等,為了探究其中的規(guī)律,專門寫下此博客記錄
2021-09-03 06:15:22
PID yunrun.com.cn/tech/681.html用經(jīng)驗(yàn)法整定PID參數(shù)又稱為試湊法,是廣大儀表工數(shù)十年整定經(jīng)驗(yàn)的積累,是應(yīng)用最為廣泛的一種調(diào)節(jié)器參數(shù)整定方法。它就是根據(jù)儀表工的經(jīng)驗(yàn)
2018-01-04 21:07:26
FOC電流環(huán)PI控制器出來后為什么是電壓?整定參數(shù)跟電機(jī)參數(shù)有關(guān)系嗎?
2021-10-13 08:17:06
如何去設(shè)計(jì)模糊PID自整定控制器?關(guān)于模糊控制器算法的研究是什么?模糊PID控制器具有哪些特點(diǎn)?
2021-04-21 06:08:28
伺服電機(jī)的主要應(yīng)用領(lǐng)域是什么?什么是伺服電機(jī)的速度控制模式?什么是伺服電機(jī)的位置控制模式?
2021-06-28 09:06:45
用protues仿真,然后溫度傳感器是DS18B20,但是這個(gè)軟件溫度傳感器是沒法測溫的,只能看一個(gè)控制效果。然后這個(gè)應(yīng)該怎么整定PID參數(shù)呢?因?yàn)樗鼪]有出波形啊,所以不知道怎么做?
2017-04-20 15:54:51
,用此法整定控制器參數(shù)時(shí)系統(tǒng)響應(yīng)衰減率大多偏小(ψ<0.75 )。為此,上述求得的控制器參數(shù),應(yīng)針對具體系統(tǒng)在實(shí)際運(yùn)行過程中進(jìn)行在線校正。(3) 臨界比例度法適用于臨界振幅不大、振蕩周期較長的過程控制
2020-02-23 07:00:00
運(yùn)動(dòng)控制器控制伺服電機(jī)的指令方式運(yùn)動(dòng)控制器以模擬量信號(hào)控制伺服電機(jī)的調(diào)試步驟
2021-01-21 07:15:51
PID參數(shù)的虛擬控制器。將此控制器用于時(shí)控系統(tǒng),控制效果理想,魯棒性強(qiáng)。關(guān)鍵詞:模糊參數(shù)自整定PID MATLAB Simulink 基于LabVIEW與MATLAB的模糊參數(shù)自整定PID控制.pdf
2019-04-03 09:40:03
一、產(chǎn)品概述TMC4671 是一款完全集成的伺服控制器,為 BLDC/PMSM 和 2 相步進(jìn)電機(jī)以及直流電機(jī)和音圈提供磁場定向控制 (FOC)。所有控制功能都在硬件中實(shí)現(xiàn)。集成ADC、位置傳感器
2022-10-31 17:40:37
本文檔內(nèi)容介紹了基于STM32簡易電機(jī)伺服控制器,供參考
2018-03-05 11:29:04 110
110 伺服電機(jī)是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電-機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的伺服電機(jī),屬于功率很小的微特電機(jī)。伺服電機(jī)分為直流伺服電機(jī)和交流伺服電機(jī),以永磁式直流伺服電機(jī)和并激式直流伺服電機(jī)最為常用。
2018-04-02 15:47:23 50713
50713 伺服的結(jié)構(gòu)是怎樣的?一個(gè)最簡易的伺服控制單元,就是一個(gè)伺服電機(jī)加伺服控制器,今天就來解析下伺服電機(jī)與伺服控制器。
2018-07-04 10:52:4242703 步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2018-09-16 09:48:192770 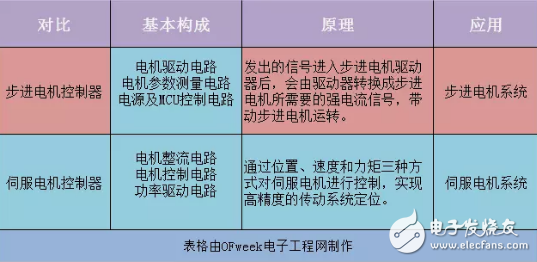
這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號(hào);伺服驅(qū)動(dòng)器工作在位置控制模式,位置閉環(huán)由伺服驅(qū)動(dòng)器完成。日系伺服和國產(chǎn)伺服產(chǎn)品大都采用這種模式。其優(yōu)點(diǎn)是系統(tǒng)調(diào)試簡單,不易產(chǎn)生干擾,但缺點(diǎn)是伺服系統(tǒng)響應(yīng)稍慢。
2019-02-17 11:16:2710987 技術(shù)需知伺服電機(jī)調(diào)試的基本步驟, 運(yùn)動(dòng)控制器控制伺服電機(jī)通常采用兩種指令方式: 1、數(shù)字脈沖 這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送脈沖/方向或CW/CCW類型的脈沖指令信號(hào)
2020-06-12 14:45:485452 伺服的結(jié)構(gòu)是怎樣的?一個(gè)最簡易的伺服控制單元,就是一個(gè)伺服電機(jī)加伺服控制器,今天就來解析下伺服電機(jī)與伺服控制器。
2020-09-24 10:54:3412382 
步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2020-12-14 20:26:091309 伺服電機(jī)控制器做為伺服電機(jī)的機(jī)械設(shè)備控制器是十分重要的,主要是根據(jù)伺服電機(jī)控制器的實(shí)際操作對伺服電機(jī)開展操縱期限精密度極高的傳動(dòng)裝置。那麼伺服電機(jī)控制器在安裝流程及其常見問題有什么呢? 1.安裝方向
2021-01-12 16:17:19874 步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2021-01-31 06:17:2415 許多人對伺服電機(jī)控制器的原理一直不理解,不知道它是如何控制的。事實(shí)上看相關(guān)介紹也可以知道看起來特別簡單,真正了解就知道不是這么回事。以下小編介紹其中的原理。 常用的伺服控制系統(tǒng)軟件是閉環(huán)控制
2021-07-11 15:22:496624 眾所周知, 直流伺服電機(jī) 控制器和編碼器是組成伺服控制系統(tǒng)的必要部件,直流伺服電機(jī)控制器主要通過讀取編碼器來獲得:伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速大小、轉(zhuǎn)子位置、轉(zhuǎn)子角度。可完成伺服電機(jī)轉(zhuǎn)速、電機(jī)轉(zhuǎn)速大小、轉(zhuǎn)角位置
2021-08-27 14:55:533655 伺服電機(jī)是一種可以通過控制器精確地控制位置、速度和加速度的電機(jī)。伺服電機(jī)通常由電機(jī)、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機(jī)的驅(qū)動(dòng)電流,從而控制電機(jī)的位置和運(yùn)動(dòng)。因此在很多需要高精度運(yùn)動(dòng)控制的領(lǐng)域得到了廣泛應(yīng)用。
2023-03-03 11:17:278928 伺服電機(jī)是一種能夠通過精確控制電機(jī)轉(zhuǎn)速、位置和加速度等參數(shù)來實(shí)現(xiàn)高精度運(yùn)動(dòng)控制的電機(jī)。
伺服電機(jī)的工作原理與普通的直流電機(jī)或步進(jìn)電機(jī)有很大不同。它由電機(jī)、減速器、編碼器和控制器組成。在工作
2023-03-07 14:46:422932 伺服控制器是一種用于控制電機(jī)運(yùn)動(dòng)的高精度電子設(shè)備,主要作用是精確控制電機(jī)的位置、速度和加速度等運(yùn)動(dòng)參數(shù),從而實(shí)現(xiàn)各種運(yùn)動(dòng)控制任務(wù)。伺服控制器通常使用閉環(huán)控制方式,即通過電機(jī)編碼器或位置傳感器的反饋信號(hào)與期望的控制信號(hào)進(jìn)行比較,從而調(diào)整輸出信號(hào)以控制電機(jī)。
2023-03-09 09:52:061953 伺服控制器(Servo Controller)是一種電子設(shè)備,用于控制伺服電機(jī)的運(yùn)動(dòng)和位置。伺服電機(jī)是一種精密的電機(jī),具有高精度、高速度和高力矩等特點(diǎn),廣泛應(yīng)用于各種需要精準(zhǔn)控制的自動(dòng)化設(shè)備和機(jī)器人
2023-03-12 11:12:193787 伺服控制器的參數(shù)設(shè)置涉及到多個(gè)方面,包括電氣參數(shù)、控制參數(shù)、運(yùn)動(dòng)參數(shù)等。下面列舉一些常見的伺服控制器參數(shù)設(shè)置:
電氣參數(shù)設(shè)置:
電機(jī)參數(shù):包括電機(jī)類型、額定電壓、額定電流、額定轉(zhuǎn)速等參數(shù)的設(shè)置和校準(zhǔn)。
驅(qū)動(dòng)器參數(shù):包括電流限制、速度限制、加速度限制等參數(shù)的設(shè)置。
2023-03-12 11:26:304611 伺服控制器的調(diào)試需要根據(jù)具體應(yīng)用場景和控制器型號(hào)進(jìn)行具體設(shè)置和調(diào)整。一般來說,伺服控制器的調(diào)試包括以下幾個(gè)方面:
電氣參數(shù)調(diào)整:包括電機(jī)的參數(shù)設(shè)置和校準(zhǔn)、驅(qū)動(dòng)器參數(shù)的設(shè)置、電源的輸出調(diào)整等。這些參數(shù)的設(shè)置需要根據(jù)具體控制器的說明書和應(yīng)用場景進(jìn)行調(diào)整。
2023-03-12 11:31:272128 伺服電機(jī)配合伺服控制器精確控制電機(jī)軸的角位置、速度和加速度。這是通過帶有解析器(與控制器的模擬通信)或絕對或增量編碼器(與控制器的數(shù)字通信)的閉環(huán)反饋系統(tǒng)來實(shí)現(xiàn)的,它提供軸的位置信息和速度。
2023-03-25 17:16:441789 操縱桿,誰不喜歡它!我們想將操縱桿的樂趣融入到電子設(shè)備中,并設(shè)計(jì)了一個(gè)使用操縱桿控制器控制伺服電機(jī)的電路。伺服電機(jī)具有強(qiáng)大的應(yīng)用,主要以其對距離和角度的精確控制而聞名。借助伺服數(shù)據(jù)引腳的準(zhǔn)確
2023-06-16 17:31:41408 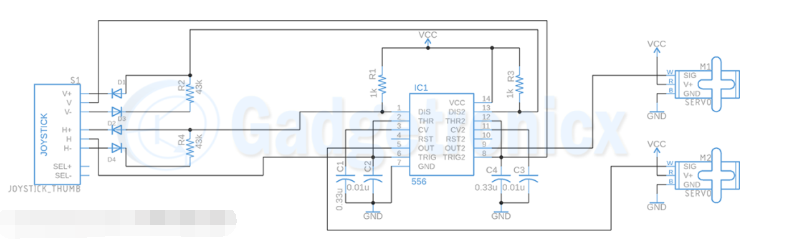
在自動(dòng)化設(shè)備中,經(jīng)常用到伺服電機(jī),特別是位置控制,大部分品牌的伺服電機(jī)都有位置控制功能,通過控制器發(fā)出脈沖來控制伺服電機(jī)運(yùn)行,脈沖數(shù)對應(yīng)轉(zhuǎn)的角度,脈沖頻率對應(yīng)速度(與電子齒輪設(shè)定
2023-08-08 08:09:141500 
電子發(fā)燒友網(wǎng)站提供《基于FPGA的步進(jìn)電機(jī)伺服控制器設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-25 09:10:400 伺服電機(jī)控制器的類型包括降壓起動(dòng)器、調(diào)速驅(qū)動(dòng)器、智能控制器等三種分類,另外控制方面主要以方波控制、正弦波控制等兩種方式。
2023-11-16 10:26:16269 的特點(diǎn),被廣泛應(yīng)用于各種自動(dòng)化控制系統(tǒng)中。 在交流伺服電機(jī)中,轉(zhuǎn)子的轉(zhuǎn)動(dòng)慣量、最大轉(zhuǎn)矩和響應(yīng)時(shí)間等參數(shù)可以根據(jù)實(shí)際需要進(jìn)行調(diào)整,以滿足不同系統(tǒng)的需求。同時(shí),交流伺服電機(jī)的控制方式也多種多樣,可以通過控制器進(jìn)行
2023-12-11 17:20:09432
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論