 電子發燒友App
電子發燒友App


引言
計算機串行通信是計算機與控制設備(如變頻器)進行數據傳送的一種通信方式,也是實現工業自動控制經常用到的通信模式。每一種通信方式都嚴格約定了與其對應的通信協議。要確保計算機與變頻器之間能正常通信,就必須遵照變頻器通信協議編寫通信程序。本文就帶有rs-485通信接口的日普變頻器作為研究對象,設計了變頻器網絡監控的方案,實現了對變頻器各項參數的在線監視和控制。以下就圍繞如何在c++builder編程環境下,利用api函數編寫計算機與日普變頻器(rp3200)之間的串行通信程序進行闡述。
串行通信
串行通信在工業系統控制的范疇中一直占據著極其重要的地位,串行端口(rs-232)是計算機上的標準配置,常用于連接調制解調器來傳輸數據,在計算機的硬件設備管理器中可以看到,定義為com1、com2等。常用的串行通信方式有兩種,分別是rs-232和rs-485,本文以rs-485方式為例進行介紹。
使用c++builder api函數編寫通信程序
c++builder本身不提供單獨的串行通信組件,這不是說它不能使用這項功能,而是必須使用一些windowsapi函數來達到這個目的。windowsapi是由操作系統提供的函數,這些函數可以為程序設計人員提供相當多的執行功能,就連操作系統本身也是由這些api函數所組成,由于已經將win32api均聲明進去了,因此在中使用api時只要直接使用即可。使用時必須以api函數的定義使用,才可以得到正確的結果,尤其參數的定義更是重要,使用時必須注意和定義相符,否則執行結果將會出錯,以下就先說明這些必備的函數。
c++builder中與串行通信相關的api函數
c++builder本身并不提供單獨的串行通信組件,而是使用一些windowsapi的函數來達到此目的。這些函數是由操作系統所提供,可以為程序設計人員提供相當多的執行功能。api中與串行通信相關的函數約有20個,以下對經常使用的函數作以討論。
打開串行端口
hcomm=createfile(comno,generic_read|generic_write,
0,null,open_existing,1,0)
函數參數定義如下:
hcomm:createfile()函數的返回值,程序使用此返回值進行相關的串行端口操作。
comno:定義串行端口號,為com1、com2等。
generic_read|generic_write:對串行端口的讀/寫操作。
0:是否共享串行端口,通常不會將串行端口與其它程序共享,因此設為0,否則為1。
null:函數的返回值hcomm是否可被子程序繼承,此處設為不可繼承。
open_existing:打開端口的方式,串行端口是一種設備,必須指定為open_existing方式。
1:使用同步或異步方式傳輸數據,變頻器為異步方式,因此設為1。
0:由于使用串行端口編程,設為0。
得到串行端口狀態
getcommstate(hcomm,&dcb)
函數參數定義如下:
hcomm:createfile()函數的返回值。
dcb:串行端口控制塊地址,負責對串行端口參數進行設置,具體參數如下:
dcb.baudrate:設置串行端口的波特率,有19200kb/s、9600kb/s、4800kb/s幾種,一般為:9600kb/s。
dcb.bytesize:設置串行端口的數據位數,有5、6、7、8幾種,變頻器數據位數為8。
dcb.parity:設置串行端口的校驗位檢查,有none、even、odd幾種,設為none。
dcb.stopbits:設置串行端口的停止位數,有1、1.5、2幾種,變頻器的停止位數為1。
設置串行端口狀態
setcommstate (hcomm,&dcb)
函數參數定義與getcommstate()函數相同。
向串行端口寫數據
writefile(hcomm,senddata,bs,&lrc,null)
函數參數定義如下:
hcomm:createfile()函數的返回值。
senddata:寫數據的地址。
bs:寫入數據的字節數。
lrc:被寫入的數據地址。
null:寫入數據的同步檢查,串行端口采用同步通信時可以設為null。
清除串行端口的錯誤或將串行端口當前的數據狀態送至輸入緩沖區
clearcommerror(hcomm,&dwerror,&cs)
函數參數定義如下:
hcomm:createfile()函數的返回值。
dwerror:返回錯誤信息代碼。
cs:指向串行端口狀態的結構變量。
從串行端口的輸入緩沖區讀出數據
readfile(hcomm,inbuff,cs.cbinque,&nbytesread,null);函數參數定義如下:
hcomm:createfile()函數的返回值。
inbuff:指向用來存儲數據的地址。
cs.cbinque:讀取數據的字節數。
nbytesread:總的讀取字節數。
null:如果不進行后臺工作,串行端口設為null。
關閉串行端口
closehandle(hcomm)
函數參數定義如下:
hcomm:createfile()函數的返回值。
變頻器的監控系統設計
硬件連接框圖
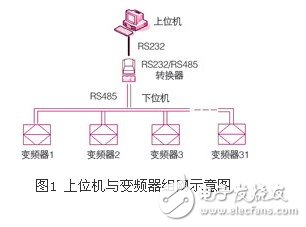
本文設計的監控系統采用平衡發送和差分接收方式實現通信。由于傳輸線通常使用雙絞線,又是差分傳輸,所以有極強的抗共模干擾的能力。rs-485最大的通信距離可達1219m,rs-485最大傳輸速率為10mb/s。rs-485采用半雙工工作方式,支持多點數據通信。總線網絡拓撲一般采用終端匹配的總線型結構。
rs-485總線一般最大支持32個節點。
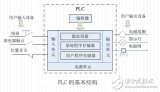
本設計采用帶有rs-485接口的日普變頻器(rp3200)控制電機運轉,上位計算機和變頻器進行通訊,計算機通過讀寫變頻器的參數來監控變頻器的運行狀態。上位機為主控計算機,下位機為被控變頻器(最多為31個)。主控和被控之間的串行控制信號始終是主控啟動傳送,被控對此作出響應。某一個時刻,主控和一個被控進行信號傳送,所以要預先給每個被控分配地址號,并由主控指定地址執行發送。被控接收到主控來的信號后執行其功能,并返回應答給主控。由于計算機本身支持rs-232串行通信方式,所以需要用rs-232與rs-485轉換器將計算機與變頻器連接起來。上位機與變頻器控制組網結構如圖1所示。
變頻器通信功能設置
此變頻器控制命令和方式有三種:數字面板控制、端子控制和rs-485通訊控制,變頻器的默認出廠設置為變頻器控制面板控制,這不符合我們與pc
機通訊的要求,為了能使變頻器與 pc機之間通訊,我們對變頻器作如下設置:
操作方式選擇
在數字面板中選擇參數設定,將運行方式按表1設置為rs-485運行方式。

通信參數設定
通信地址設定:定義設備地址 1 – 31,在線不允許兩個設備占用一個地址
傳送中斷檢測時間:設定 范圍為:0-60sec
通信規格設定:
接口:rs-485 同步方式:異步
傳輸參數:
波特率:可從 1200,2400,4800,9600,19200 等中選擇
停止位:固定為 1位
變頻器通信命令介紹
通信數字符格式
數字符格式如圖2所示。
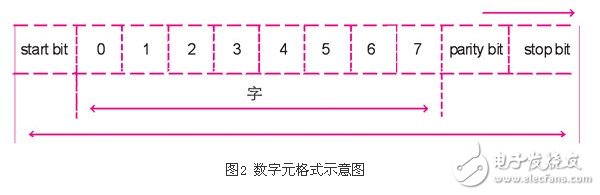
1位起始位,8位數據位,奇校驗,1位停止位。
糾錯方法
在信息后加checksum, checksum等于所有字節(hex)之和的最后一字節,轉換為ascii碼。
數據包格式
類似modbus ascii格式,格式如下。
header akp1p0 d3d2d1d0 s delimiter
格式解析:
【header】:3ah
【delimiter】:0dh,0ah
a、k、p1p0、d3d2、d1d0、s分別為單字節十六進制數,轉換為ascii碼。
【a】:從機(變頻器)地址。變頻器地址范圍為(1-31),a必須存在。
注:地址a=00h時對所有從機有效,且所有從機不回送響應信息。故a=00h只能發送運行命令操作。
【k】:數據包功能代碼。
【p1p0】:參數序號。參數標號,兩字節十六進制數。
【d3d2d1d0】:參數值:去掉小數點的參數值,共四字節的十六進制數,先發高位,后發低位。
【s】:和校驗字。s是上面所有字節十六進制之和(a+k+p1p0+d3+d2+d1+d0)取最后一字節(bit7-bit0)值,轉換為ascii碼。
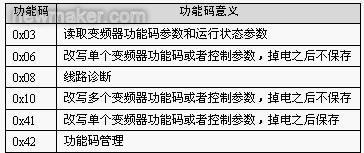
其中k、p、d3d2d1d0參數定義如表3所示。

計算機與變頻器串行通信程序實現
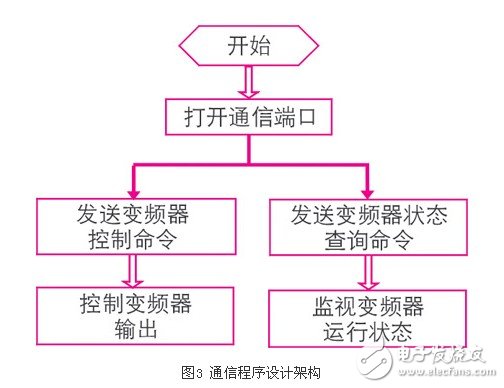
通信主程序的設計架構
設計通信主程序的主要功能是:實現計算機對變頻器的運行控制和狀態監視,即構成一個閉環監控系統。程序設計架構如圖3示。
例1:變頻起運行參數設定
1#變頻器在運行狀態下改變它的“設定頻率”為35.00hz
方法如下:
35.00去掉小數為3500d=0dach
a=1=01h (變頻器地址為“01h”)
k=04h (運行參數設定為“04h”)
p1p0=0001h (運行時設定頻率為“0001h”)
d3=00h (數據高字節為“00h”)
d2=00h (數據次高字節為“00h”)
d1=0dh (數據次字節為“0dh”)
d0=ach (數據低字節為“ach”)
s=c9h (和校驗字節為“c9h”)
(s=0bh+04h+00h+01h+00h+00h+00h+0dh+ach=c9h)
主機先后依次發送字節如下的數據包ascii:
3ah,30h,42h,30h,34h,30h,30h,30h,31h,30h,30h,30h,30h,30h,44h,41h,43h,43h,39h,0dh,0ah
變頻器回復主機相同數據。
部分通信代碼如下:
打開通訊端口代碼
char *comno;
dcb dcb;
string temp;
temp=“com”+inttostr(rdcom-》itemindex+1);
comno=temp.c_str() ;
hcomm=createfile(comno,generic_
read|generic_write,0,null,open_existing,0,0);
if(hcomm==invalid_handle_value)
{
statusbar1-》simpletext=“打開通信端口錯誤!”;
return;
}
else
statusbar1-》simpletext=“端口已打開!”;
sleep(100);
getcommstate(hcomm,&dcb);
dcb.baudrate=cbr_9600;
dcb.bytesize =8;
dcb.parity =noparity;
dcb.stopbits =onestopbit;
setcommstate(hcomm,&dcb);
if(!setcommstate(hcomm,&dcb))
{
statusbar1-》simpletext=“通信端口設置錯誤!”;
closehandle(hcomm);
return;
}
發送數據代碼
int i=0;
unsigned char sends[21];
unsigned long lrc,bs;
sends[0]=3ah; //header
sends[1]=30h; //a
sends[2]=31h;
sends[3]=30h;//k
sends[4]=34h;
sends[5]=30h; //p1
sends[6]=30h;
sends[7]=30h; //p0
sends[8]=31h;
sends[9]=30h; //d3
sends[10]=30h;
sends[11]=30h;//d2
sends[12]=30h;
sends[13]=30h; //d1
sends[14]=44h;
sends[15]=41h; //d0
sends[16]=43h;
sends[17]=43h; //s
sends[18]=39h;
sends[19]=0dh; //delimiter
sends[20]=0ah;
for(i=0;i++;i《21)
{
if(hcomm==0)
return;
writefile(hcomm,sends,1,&lrc,null);
}
接收數據代碼
int ln;
unsigned long lrc,bs;
char inbuff[1024];
dword nbytesread,dwevent,dwerror;
comstat cs;
if(hcomm==0)
{
mreceive-》text=“讀取過程有問題,已跳出!”;
return;
}
if(hcomm==invalid_handle_value)
{
mreceive-》text=“讀取過程有問題,已跳出!”;
return;
}
clearcommerror(hcomm,&dwerror,&cs);
if(cs.cbinque)
{
readfile(hcomm,inbuff,cs.cbinque,&nbytesread,null);
inbuff[cs.cbinque]=`\0`;
mreceive-》text=inbuff;
interceptrece(mreceive-》text);
}
else
mreceive-》text=“未讀取到數據!”;
以上代碼在winxp sp2操作系統, c++builder6 編程環境下調試編譯通過。
結語
通過對帶有rs-485通信接口的日普系列變頻器的研究,設計了可行的變頻器網絡監控系統方案,在c++builder編程環境下,利用api函數,實現了變頻器各項參數的在線監測與控制。提高了變頻器控制的自動化水平。










 工商網監
工商網監
評論