伺服電機及其驅(qū)動技術(shù)
2022-09-07 10:07:34 679
679 該伺服驅(qū)動器采用有2個相同的伺服電機驅(qū)動板,電機編碼器信號通過接口反饋給控制芯片。伺服電機控制信號通過光耦連接到后端伺服電機驅(qū)動芯片控制端。
2024-01-22 14:45:43297 
一臺伺服電機1FK6,換了軸承,但是連上伺服驅(qū)動器master driver (6se7),就報警F023(變頻器超溫),求教應(yīng)怎樣處理?
2023-12-11 07:06:21
伺服電機驅(qū)動器的工作原理?基本要求有哪些?
2021-09-28 08:20:29
【不懂就問】伺服電機的控制,典型分為三個環(huán),位置環(huán)、速度環(huán)、電流環(huán)其中涉及的一個控制參數(shù)“位置前饋增益”怎么理解
2018-07-24 08:41:25
伺服電機是什么?其工作原理又是什么?伺服電機的程序是什么?有哪幾種方法?
2021-06-28 06:11:46
伺服電機是否必須有對應(yīng)的伺服驅(qū)動器來控制?沒有伺服驅(qū)動器能使用伺服電機嗎?怎么控制?首次接觸,不懂
2023-12-15 07:49:19
什么是伺服系統(tǒng)?伺服電機的工作原理是什么?交流伺服電機的工作原理是什么?
2021-10-11 08:32:00
伺服電機內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,同時電機自帶的編碼器反饋信號給驅(qū)動器,驅(qū)動器根據(jù)反饋值與目標值進行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動的角度。伺服電機
2021-06-28 09:57:35
伺服驅(qū)動器與伺服電機怎么連接?如何實現(xiàn)伺服驅(qū)動器的基本控制?
2021-09-28 08:29:01
本人剛接觸伺服驅(qū)動器,知到伺服驅(qū)動器每轉(zhuǎn)128萬個脈沖,想精確確定每18°是多少個脈沖,要調(diào)那些參數(shù)嗎?最后要用PLC控制伺服電機
2021-06-20 22:52:33
伺服系統(tǒng)由哪幾部分組成?伺服系統(tǒng)常用的參數(shù)有哪些?如何選擇伺服電機?伺服驅(qū)動器控制原理是什么?
2021-09-26 08:26:53
步進電機工作原理:通過控制電脈沖可以實現(xiàn)對步進電機的轉(zhuǎn)向、速度和旋轉(zhuǎn)角度的控制;伺服電機工作原理:驅(qū)動控制對象。被控對象受信號電壓大小和極性控制,電機的轉(zhuǎn)動速度和方向也跟著變化。 步進電機基于最基本
2023-03-15 13:30:31
交流伺服電機的工作原理是什么?
2021-09-26 06:37:53
關(guān)于交流伺服電機和伺服電機驅(qū)動器的知識點總結(jié)的太棒了
2021-09-27 08:22:21
,這完全取決于你設(shè)計的傳動機構(gòu)的精度要求,只要按你的功能進行相應(yīng)的參數(shù)匹配就可以,精度越高,成本越高。5、減速機接口的配置在選擇伺服電機減速機的過程中,有兩個減速機的接口是需要明確的,第一個接口
2023-03-09 18:17:48
怎么提高微電機工作效率
2021-01-25 07:39:23
如何用Turbo PMAC驅(qū)動一個松下交流伺服電機?
2021-09-28 08:53:46
的轉(zhuǎn)速,出廠值為500,如果你只準備讓電機在1000轉(zhuǎn)以下工作,那么,將這個參數(shù)設(shè)置為111。2、接線將控制卡斷電,連接控制卡與伺服之間的信號線。以下的線是必須要接的:控制卡的模擬量輸出線、使能信號線
2015-12-29 11:12:23
伺服驅(qū)動器和伺服電機的接線方法是什么?伺服驅(qū)動器如何進行參數(shù)配置?如何通過PLC控制伺服電機的正反轉(zhuǎn)及定長控制?
2021-09-29 08:38:16
推薦課程:張飛軟硬開源:基于STM32的BLDC直流無刷電機驅(qū)動器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd 伺服驅(qū)動器是三菱MR-J4-40A的,采用位置控制模式,參數(shù)如圖1。伺服電機是三菱HG-MR43的,參數(shù)如圖二,幫忙看一下謝謝!
2019-05-31 11:43:59
怎樣判斷伺服電機與伺服驅(qū)動器的故障區(qū)別?交流伺服是否是以直流無刷伺服的原理為基礎(chǔ)演變的?交、直流伺服的區(qū)分是否取決于驅(qū)動器與電機間的電流或電壓的形式?
2021-08-05 06:57:50
你好 !有沒有一種方法可以在電機工作臺中微調(diào)電機參數(shù)(最終斜坡值、速度斜升...),而無需從電機控制工作臺系統(tǒng)地重新生成代碼然后 Cube-MX 每次我想調(diào)整一個參數(shù)?更改每個參數(shù)可能需要 3 分鐘以上,這使得微調(diào)成為一個障礙。
2023-01-03 09:59:35
步進電機的工作原理是什么?伺服電機的工作原理是什么?步進電機與伺服電機有哪些區(qū)別?
2021-09-30 07:56:28
大家好,ST有開發(fā)“永磁同步交流伺服電機”和“交流感應(yīng)伺服電機”驅(qū)動電路的方案嗎?
2023-01-03 09:04:04
`推薦課程:張飛軟硬開源:基于STM32的BLDC直流無刷電機驅(qū)動器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd 直流、交流伺服電機的結(jié)構(gòu)及工作原理一
2015-12-25 18:19:13
,就是小功率的直流電動機,其勵磁多采用電樞控制和磁場控制,但通常采用電樞控制。2、直流伺服電機的原理直流伺服電機的工作原理與普通的直流電機工作原理基本相同。依靠電樞氣流與氣隙磁通的作用產(chǎn)生電磁轉(zhuǎn)矩,使
2018-10-26 10:50:25
由于直線伺服電機可以不需要借助任何中間轉(zhuǎn)換機構(gòu)即可產(chǎn)生直線運動,特別適用于直線運動場合。與傳統(tǒng)旋轉(zhuǎn)電機相比,采用直線電機驅(qū)動的裝置具有以下優(yōu)點: (1) 直線伺服電機中動子可以與負載直接相連產(chǎn)生
2018-09-03 09:07:49
最近,在進行直線電機標準伺服算法的參數(shù)整定工作,標準伺服算法中參數(shù)眾多,給整定工作帶來了不少的難度,參數(shù)與直線電機響應(yīng)之間的影響、參數(shù)與參數(shù)之間的相互影響等等,為了探究其中的規(guī)律,專門寫下此博客記錄
2021-09-03 06:15:22
請問伺服電機如何保存當前參數(shù)?
2021-09-27 08:13:04
請問伺服電機如何恢復(fù)為出廠參數(shù)?
2021-09-28 08:01:28
請問伺服驅(qū)動器是怎樣來驅(qū)動伺服電機的?
2021-09-26 06:40:10
EtherCAT總線伺服電機/一體化伺服電機如何恢復(fù)為出廠參數(shù)?
2021-06-28 06:13:21
直流發(fā)電機工作原理圖
2020-03-12 09:02:17
進給驅(qū)動伺服電機怎么選?伺服電機慣量Jm和負載慣量Jl之間的有什么關(guān)系?
2021-09-24 08:36:29
高創(chuàng)伺服驅(qū)動器+直流有刷電機+雷尼紹增量式REXM圓光柵配置過程電機尋相一直失敗,請問一下可能是什么原因呢。
2021-10-04 22:30:27
高速伺服電機MGV具有哪些參數(shù)應(yīng)用?
2021-10-08 06:41:43
交流發(fā)電機工作特性介紹
2010-07-25 23:28:45 34
34 電機工作狀態(tài)聲光警示電路
2007-12-20 22:18:12549 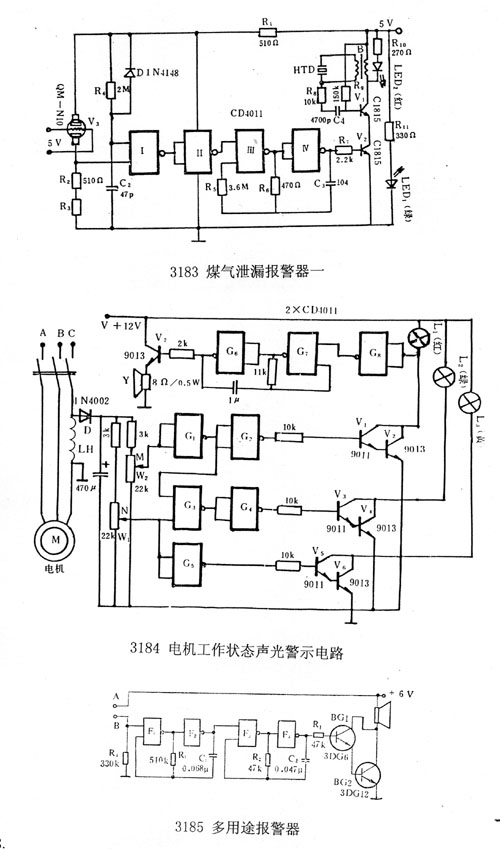
步進式伺服驅(qū)動系統(tǒng)工作原理
步進式伺服驅(qū)動系統(tǒng)主要由步進電機驅(qū)動控制線路和步進電機兩部分組成,如圖5--7所示。驅(qū)動控制線路
2009-05-06 23:44:393377 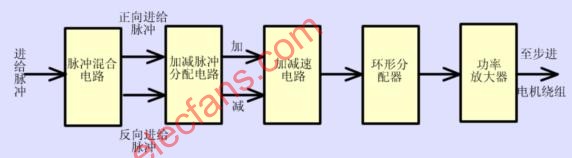
交流伺服電機的工作原理
交流伺服電機驅(qū)動是最新發(fā)展起來的新型伺服系統(tǒng),也是當前機床進給驅(qū)動系統(tǒng)方面的一個新動向。該系統(tǒng)
2009-05-06 23:50:1040286 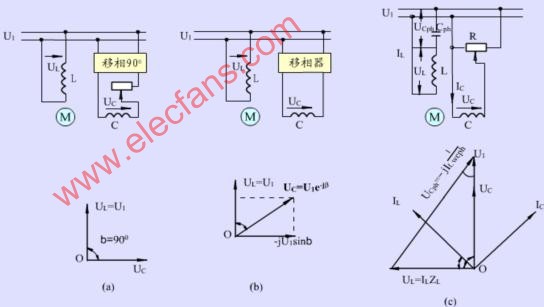
交流伺服電機的工作原理
伺服電機內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,同時電
2009-10-25 14:33:493771 伺服電機工作原理
伺服電機內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,同時電機自帶的編碼器反饋信號給
2010-01-09 21:09:463200 感應(yīng)子式步進電機工作原理
(一)反應(yīng)式步進電機原理由于反應(yīng)式步進電機工作原理比較簡單。下面先敘述三相反應(yīng)式步進電機原
2010-01-09 15:09:451951 
直流無刷電機工作原理
2017-01-21 12:00:2924 伺服電機(servomotor)是指在伺服系統(tǒng)中控制機械元件運轉(zhuǎn)的發(fā)動機,是一種補助馬達間接變速裝置。伺服電機可使控制速度,位置精度非常準確,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。
2017-03-22 11:26:318537 電機工作制是對電機承受負載情況的說明,包括啟動、電制動、負載、空載、斷能停轉(zhuǎn)以及這些階段的持續(xù)時間和先后順序。工作制分為S1~S10共10類:
1) 連續(xù)工作制---S1。在恒定負載下的運動時間足以使電機達到熱穩(wěn)定。
。。。
2017-06-28 17:15:1917 電機工作制劃分
2017-10-09 17:05:568 交流伺服電機的工作原理:伺服系統(tǒng)- -般由伺服放大器和伺服電機構(gòu)成。伺服電機內(nèi)部的轉(zhuǎn)子是永磁鐵,伺服放大器控制的U,V,W 三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,同時電機自帶的編碼器反饋信號給驅(qū)動器,驅(qū)動器根據(jù)反饋值與目標值進行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動的角度。伺服電機的精度決定于編碼器的分辨率。
2017-10-17 09:28:1125 伺服電機工作原理伺服電機內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,同時電機自帶的編碼器反饋信號給驅(qū)動器,驅(qū)動器根據(jù)反饋值與目標值進行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動
2017-10-17 14:15:0492 因為,伺服電機本身具備發(fā)出脈沖的功能,所以伺服電機每旋轉(zhuǎn)一個角度,都會發(fā)出對應(yīng)數(shù)量的脈沖,這樣,和伺服電機接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來,系統(tǒng)就會知道發(fā)了多少脈沖給伺服電機,同時又收了多少脈沖回來,這樣,就能夠很精確的控制電機的轉(zhuǎn)動,從而實現(xiàn)精確的定位,可以達到0.001mm。
2018-04-12 15:06:2613696 本文開始介紹了伺服電機的工作原理與優(yōu)點,其次介紹了伺服電機的選型步驟與最簡單伺服電機選型計算方式,最后介紹了伺服電機選型的注意事項。
2018-04-25 14:36:4741422 
單四拍、雙四拍與八拍工作方式的電源通電時序與波形分別如圖2.a、b、c所示。驅(qū)動器相當于開關(guān)的組合單元。通過上位機的脈沖信號有順序給電機相序通電使電機轉(zhuǎn)動。 伺服驅(qū)動器(servodrives)又稱
2020-06-29 11:32:543243 富士伺服電機驅(qū)動器選型6大關(guān)鍵性參數(shù) 伺服電動機是利用反饋來實現(xiàn)以工作為變量的系統(tǒng)的閉環(huán)控制的電動機。交流感應(yīng)電機設(shè)計用于伺服操作以直角纏繞兩相。固定參考繞組由固定電壓源激勵,而伺服放大器的可變控制
2020-06-28 17:55:282981 本文首先介紹了永磁變頻電機和普通變頻電機的區(qū)別,另外還詳細介紹了永磁變頻電機工作原理。
2019-07-16 11:20:3926991 伺服驅(qū)動器在控制信號的作用下驅(qū)動執(zhí)行電機,因此驅(qū)動器是否能正常工作直接影響設(shè)備的整體性能。在伺服控制系統(tǒng)中,伺服驅(qū)動器相當于大腦,執(zhí)行電機相當于手腳。而伺服驅(qū)動器在伺服控制系統(tǒng)中的作用就是調(diào)節(jié)電機的轉(zhuǎn)速,因此也是一個自動調(diào)速系統(tǒng)。
2019-10-07 17:08:0049581 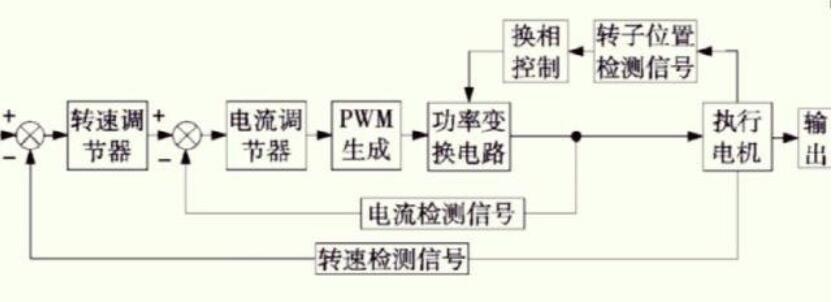
伺服電機驅(qū)動器一般為用戶提供了豐富的用戶參數(shù)0~59個,報警參數(shù)1~32個,監(jiān)視方式(電動機轉(zhuǎn)速,位置偏差等)22個。用戶可以根據(jù)不同的現(xiàn)場情況調(diào)整參數(shù),以達到最佳控制效果
2019-10-31 10:03:5452612 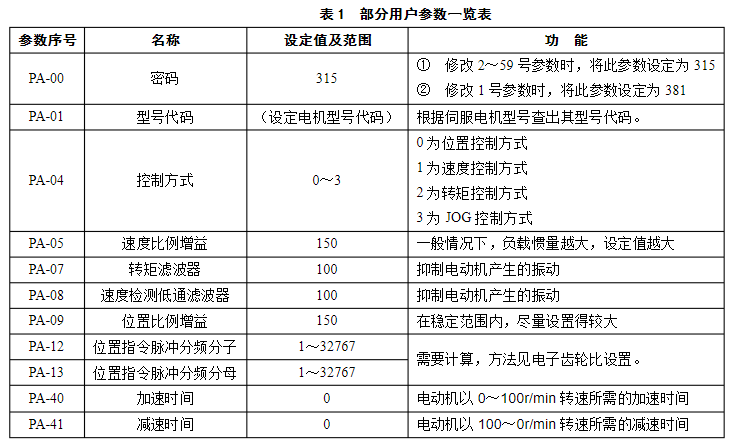
直流伺服電機的日常保護措施非常重要,直接關(guān)系到整個機械的正常運轉(zhuǎn)和直流伺服電機的使用壽命。所以日常的保養(yǎng)與維護是必不可少的! 直流伺服電機的保護措施主要是指在使用電機過程中,需要注意直流伺服電機工作
2020-06-08 16:20:081156 有刷電機采用機械換向,磁極不動,線圈旋轉(zhuǎn)。電機工作時,線圈和換向器旋轉(zhuǎn),磁鋼和碳刷不轉(zhuǎn),線圈電流方向的交替變化是隨電機轉(zhuǎn)動的換相器和電刷來完成的。
2020-06-08 16:40:268340 
伺服電機如今被用于生活中的方方面面,那么伺服電機工作原理是什么呢?伺服電機是利用電壓信號來控制轉(zhuǎn)矩和轉(zhuǎn)速的,這也讓伺服電機有著更高的精準度,在操作過程中能夠輕松的利用電壓來控制轉(zhuǎn)速的輸出,從而滿足不同情況下的轉(zhuǎn)速需求,保證了動力的完美利用,確保了機械應(yīng)用效率更高。
2020-08-19 16:46:301555 本文主要闡述了罩極電機工作原理及罩極電機的優(yōu)缺點。
2020-08-31 17:12:4242866 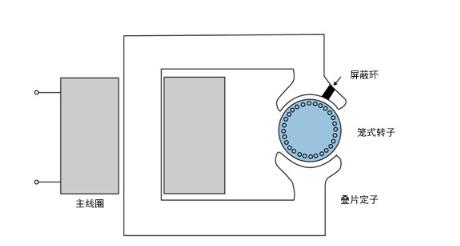
伺服電機英文名為Servo motor,是一種在伺服系統(tǒng)中控制機械電子元件的發(fā)動機,是補助馬達簡潔變速電子裝置之一。伺服電機可將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和專屬以驅(qū)動控制對象。伺服電機轉(zhuǎn)子轉(zhuǎn)速受輸入信號控制
2021-07-15 14:57:4541256 控制,實現(xiàn)高精度的傳動系統(tǒng)定位,是傳動技術(shù)的高端產(chǎn)品。 ? ? 工作原理: ? ? ? ?安川伺服驅(qū)動器維修安川伺服驅(qū)動器是用來控制伺服電機的,作用類似于變頻器驅(qū)動交流電機,屬于伺服系統(tǒng)的一部分。 ? ? ? ?安川伺服驅(qū)動器采
2021-07-16 11:23:414292 什么是伺服電機 伺服電機:是在伺服系統(tǒng)中控制機械元件運轉(zhuǎn)的發(fā)動機,是一種補助馬達間接變速裝置。 伺服電機可以控制速度,位置精度非常準確,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。伺服電機轉(zhuǎn)子轉(zhuǎn)速
2021-07-18 10:13:2235492 三洋伺服電機的工作原理: 伺服是指在伺服系統(tǒng)中控制機械元件運轉(zhuǎn)的發(fā)動機,是一種補助馬達間接變速裝置。 ? ? ? ?伺服電機分為直流和交流伺服電動機兩大類,其主要特點是,當信號電壓為零時無自轉(zhuǎn)現(xiàn)象
2021-07-20 16:53:473949 控制,實現(xiàn)高精度的傳動系統(tǒng)定位,是傳動技術(shù)的高端產(chǎn)品。 ? ? 工作原理: ? ? ? ?安川伺服驅(qū)動器維修安川伺服驅(qū)動器是用來控制伺服電機的,作用類似于變頻器驅(qū)動交流電機,屬于伺服系統(tǒng)的一部分。 ? ? ? ?安川伺服驅(qū)動器采
2021-08-04 09:15:105044 伺服電機工作原理 在伺服系統(tǒng)中控制機械元件運轉(zhuǎn)的發(fā)動機稱為伺服電機,它是一種補助馬達間接變速裝置。伺服電機能夠控制速度,并且伺服電機的位置精度非常的高,能夠?qū)㈦妷盒盘栟D(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象
2021-08-06 17:44:5231752 控制,實現(xiàn)高精度的傳動系統(tǒng)定位,是傳動技術(shù)的高端產(chǎn)品。 ? ? 工作原理: ? ? ? ?安川伺服驅(qū)動器維修安川伺服驅(qū)動器是用來控制伺服電機的,作用類似于變頻器驅(qū)動交流電機,屬于伺服系統(tǒng)的一部分。 ? ? ? ?安川伺服驅(qū)動器采
2021-08-06 20:26:545096 伺服電機是如何工作的? 伺服電機可以用輸入信號將傳動軸的旋轉(zhuǎn)位置控制為特定的角度。伺服電機有兩種類型——交流和直流。 伺服系統(tǒng)由脈寬調(diào)制(PWM)信號通過控制線進行控制,存在最小脈沖寬度和重復(fù)
2021-10-11 15:56:249643 若使用伺服電機及驅(qū)動器過程中,單驅(qū)動或單電機出現(xiàn)問題,不能進行更換,您該如何選擇?有沒有一個問題,可以使用不同品牌的伺服電機或驅(qū)動電機與現(xiàn)有的伺服電機或驅(qū)動裝置相匹配?這是小編回答的問題,我們不建議
2021-10-19 16:32:456991 伺服驅(qū)動器是用來控制伺服電機的一種控制器,現(xiàn)代運動控制的重要組成部分,主要應(yīng)用于高精度的定位系統(tǒng)。伺服驅(qū)動器廣泛應(yīng)用于注塑機領(lǐng)域、紡織機械、包裝機械、數(shù)控機床領(lǐng)域等。接下來簡單介紹伺服驅(qū)動器的功能作用及相關(guān)參數(shù)。
2022-01-12 13:13:2014297 什么是伺服驅(qū)動器?伺服驅(qū)動器是用來控制伺服電機的一種控制器,被廣泛應(yīng)用于自動化設(shè)備中,那么伺服驅(qū)動器一般要設(shè)置哪些參數(shù)?
2022-01-17 10:41:0422173 有關(guān)),當一個新的系統(tǒng),參數(shù)不能工作時,首先設(shè)定位置增益,確保電機無噪音情況下,盡量設(shè)大些,轉(zhuǎn)動慣量比也非常重要,可通過自學(xué)習(xí)設(shè)定的數(shù)來參考,
2022-11-24 14:27:504953 交流伺服系統(tǒng)包括:伺服驅(qū)動、伺服電機和一個反饋傳感器(一般伺服電機自帶光學(xué)偏碼器)。所有這些部件都在一個控制閉環(huán)系統(tǒng)中運行:驅(qū)動器從外部接收參數(shù)信息,然后將一定電流輸送給電機,通過電機轉(zhuǎn)換成扭矩帶動負載,負載根據(jù)它自己的特性進行動作或加減速
2022-12-06 15:20:42869 伺服電機的作用是驅(qū)動控制對象。被控對象的轉(zhuǎn)距和轉(zhuǎn)速受信號電壓控制,信號電壓的大小和極性改變時,電機的轉(zhuǎn)動速度和方向也跟著變化。
2023-03-01 15:42:005397 伺服電機和伺服驅(qū)動器通常作為一個整體出售,也可以根據(jù)用戶的需要進行定制組裝。在選擇伺服電機和伺服驅(qū)動器時,需要考慮電機的功率、轉(zhuǎn)矩、轉(zhuǎn)速等參數(shù),以及控制系統(tǒng)的響應(yīng)速度、精度、穩(wěn)定性等指標,以保證系統(tǒng)的性能和穩(wěn)定性。
2023-03-01 15:59:287380 
伺服電機是一種可以通過控制器精確地控制位置、速度和加速度的電機。伺服電機通常由電機、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機的驅(qū)動電流,從而控制電機的位置和運動。
2023-03-03 11:06:301730 伺服電機的工作溫度要求也會因電機和驅(qū)動器的型號和規(guī)格而有所不同,但通常的工作溫度范圍在0℃-50℃之間。在一些特殊應(yīng)用場合,伺服電機可能需要在更高或更低的溫度范圍內(nèi)工作,這時需要根據(jù)具體的應(yīng)用情況選用合適的型號和規(guī)格的電機和驅(qū)動器。
2023-03-03 11:19:046687 伺服電機是一種能夠通過精確控制電機轉(zhuǎn)速、位置和加速度等參數(shù)來實現(xiàn)高精度運動控制的電機。
伺服電機的工作原理與普通的直流電機或步進電機有很大不同。它由電機、減速器、編碼器和控制器組成。在工作
2023-03-07 14:46:422932 伺服電機的型號通常由一串字母和數(shù)字組成,不同廠家的型號表現(xiàn)形式有所不同。以下是一些常見的伺服電機型號表示方法:
型號中含有電機的參數(shù):一些廠家的伺服電機型號中會包含電機的參數(shù),如電壓、功率
2023-03-07 15:10:2110813 伺服驅(qū)動電機,簡稱伺服電機,是在普通電機的基礎(chǔ)上集成編碼器的產(chǎn)物。
2023-05-08 09:55:13458 伺服驅(qū)動器在控制信號的作用下驅(qū)動執(zhí)行電機,因此驅(qū)動器是否能正常工作直接影響設(shè)備的整體性能。在伺服控制系統(tǒng)中,伺服驅(qū)動器相當于大腦,執(zhí)行電機相當于手腳。
而伺服驅(qū)動器在伺服控制系統(tǒng)中的作用就是調(diào)節(jié)電機的轉(zhuǎn)速,因此也是一個自動調(diào)速系統(tǒng)。
2023-05-17 10:05:122911 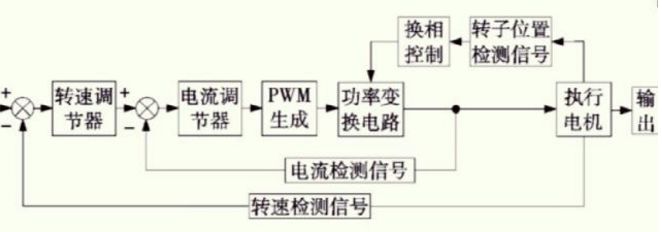
對伺服驅(qū)動器來說,最高可以接收500KHz的脈沖(差動輸入)集電極輸入是200KHz。電機輸出的力矩由負載決定,負載越大電機輸出的力矩越大,當然不能超出電機的額定負載。急劇的加減速或者過載而造成
2023-05-17 10:07:4813123 驅(qū)動器電路發(fā)揮作用的地方,該電路使用IC555來執(zhí)行這項工作。通讀本教程以更好地了解伺服電機及其工作原理。
2023-06-18 11:11:15528 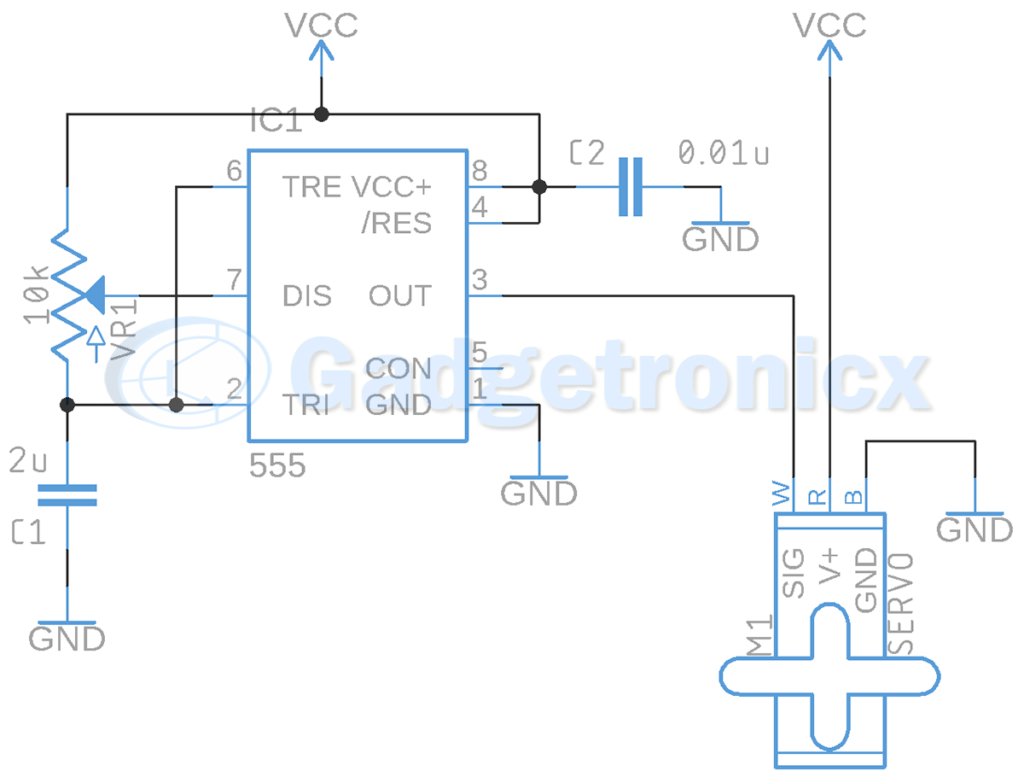
伺服電機具有獨特的特性,即根據(jù)輸入信號的脈沖寬度轉(zhuǎn)向特定角度(0,90,180)。這些伺服電機廣泛用于機器人應(yīng)用、機械控制等。通常微控制器將用于控制伺服電機,但偶爾您會發(fā)現(xiàn)一些其他IC用于此目的。本文介紹了伺服電機的工作原理和工作原理。
2023-06-29 15:44:291642 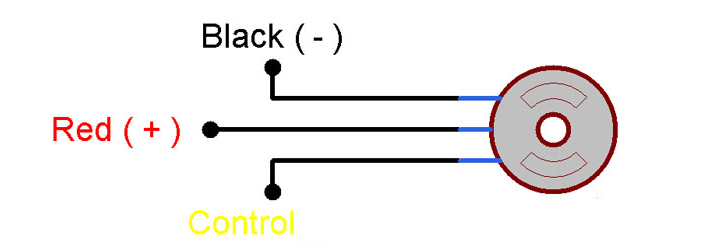
有關(guān)),當一個新的系統(tǒng),參數(shù)不能工作時,首先設(shè)定位置增益,確保電機無噪音情況下,盡量設(shè)大些,轉(zhuǎn)動慣量比也非常重要,可通過自學(xué)習(xí)設(shè)定的數(shù)來參考。然后設(shè)定速度增益和速度積分時間,確保在低
2023-08-08 08:09:141500 
伺服電機的工作原理是通過內(nèi)部的反饋系統(tǒng),對電機的運轉(zhuǎn)狀態(tài)進行監(jiān)測和調(diào)整,使得電機能夠在預(yù)定的位置和速度上運轉(zhuǎn)。在伺服電機中,通常會采用編碼器作為反饋傳感器,通過檢測電機轉(zhuǎn)子的位置和速度信號,以實現(xiàn)對電機的控制和調(diào)整。
2023-08-26 11:06:032494 伺服電機是一種高性能、高精度的電機,廣泛應(yīng)用于自動化控制系統(tǒng)中。要實現(xiàn)伺服電機的正常工作,就需要將其連接到適當?shù)?b class="flag-6" style="color: red">驅(qū)動器上。下面,將介紹伺服電機與驅(qū)動器的連接方法。 一、接線準備 確定伺服電機和驅(qū)動
2023-12-20 09:47:321076 本文以松下FP1系列PLC和A4系列伺服驅(qū)動為例,編制控制伺服電機定長正、反旋轉(zhuǎn)的PLC程序并設(shè)計外圍接線圖,此方案不采用松下的位置控制模塊FPG--PP11122122等,而是用晶體管輸出
2023-12-21 10:08:02631 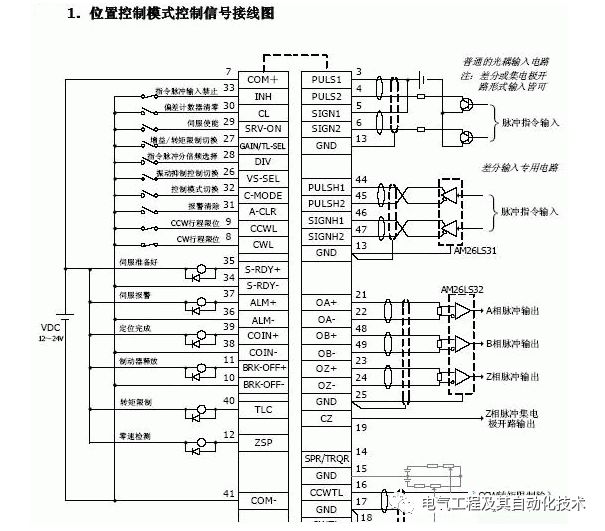
有關(guān)),當一個新的體系,參數(shù)不能工作時,首要設(shè)定方位增益,保證電機無噪音狀況下,盡量設(shè)大些,轉(zhuǎn)動慣量比也非常重要,可經(jīng)過自學(xué)習(xí)設(shè)定的數(shù)來參考,然后設(shè)定速度增益和速度積分時間,保證在低速運轉(zhuǎn)時連續(xù),方位精度受控即可。 (1)方位份額增
2024-01-05 08:39:44222 伺服驅(qū)動器是現(xiàn)代工業(yè)自動化系統(tǒng)中常用的一種執(zhí)行控制的設(shè)備,它能夠通過電信號控制電機的速度和位置。設(shè)置伺服驅(qū)動器的參數(shù)是使用伺服驅(qū)動器前必須要進行的一項工作,下面將從硬件安裝和軟件配置兩個方面詳細介紹
2024-01-11 10:51:13813 伺服電機和伺服電機驅(qū)動器是緊密相關(guān)的兩個部分,它們通常作為一個完整的系統(tǒng)來實現(xiàn)精確的運動控制。
2024-01-13 17:53:221246 伺服電機是一種特殊的電機,能夠根據(jù)控制信號的反饋信息來調(diào)整輸出轉(zhuǎn)速和位置,具有較高的精度和響應(yīng)速度,廣泛應(yīng)用于機械控制系統(tǒng)中。本文將詳細介紹伺服電機的結(jié)構(gòu)和工作原理。 一、結(jié)構(gòu) 伺服電機主要由電機
2024-02-02 14:20:09322 和運動控制的領(lǐng)域,如數(shù)控機床、機器人、自動化生產(chǎn)線等。 伺服電機的工作原理可以簡單總結(jié)為以下幾個步驟: 接收指令信號:控制器接收來自外部設(shè)備(如PLC)的指令信號,指令信號包含了期望的運動狀態(tài),如位置和速度。 反
2024-02-04 10:10:45248 的工作原理 交流伺服電機是一種特殊的交流電機,由電機本身和電機驅(qū)動器組成。電機驅(qū)動器負責(zé)電機的控制和保護功能,通常包含電源模塊、控制模塊、位置檢測模塊和功率輸出模塊。 在交流伺服電機中,控制模塊起著核心的作用。它接
2024-02-18 14:59:25276 伺服電機對拖測功機是一種廣泛應(yīng)用于工業(yè)領(lǐng)域的測試設(shè)備,它主要用于測量電機的性能參數(shù),如功率、轉(zhuǎn)速、扭矩等。本文將對伺服電機對拖測功機的工作原理、應(yīng)用領(lǐng)域、優(yōu)缺點等方面進行詳細闡述,以期為讀者提供全面
2024-03-21 15:22:4999 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論