如何求出從TL431到光耦的傳遞函數(shù)?下圖是反激的TL431的典型電路,我們的目標(biāo)就是求出傳遞函數(shù)Vout (s)/Verr(s)。
2022-10-12 09:11:15 2249
2249 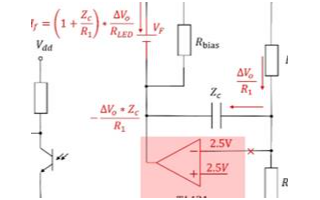
前項(xiàng)中,通過“傳遞函數(shù)”的觀點(diǎn)說明傳遞函數(shù)的基礎(chǔ)概念。在這里,介紹具體的電路模塊的傳遞函數(shù)。首先從“放大器的傳遞函數(shù)”開始。模擬的DC/DC的多數(shù)使用誤差放大器。因此,請理解為放大器的傳遞函數(shù)的導(dǎo)出必不可少。
2023-02-24 09:51:131935 
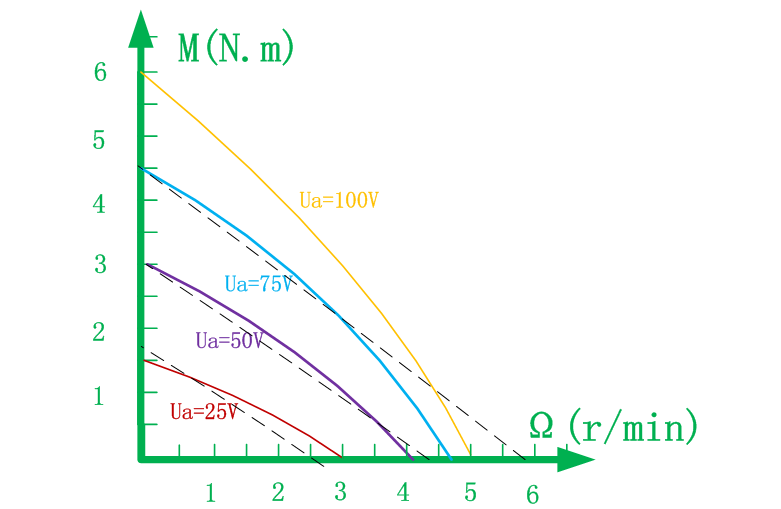
直流伺服電動(dòng)機(jī)以其調(diào)速性能好、啟動(dòng)力矩大、運(yùn)轉(zhuǎn)平穩(wěn)、轉(zhuǎn)速高等特點(diǎn),相當(dāng)長的時(shí)間內(nèi),在電動(dòng)機(jī)調(diào)速領(lǐng)域占據(jù)著重要地位。隨著電力電子技術(shù)的發(fā)展,特別是大功率電子器件問世以后,直流伺服電動(dòng)機(jī)開始逐漸被交流
2023-03-07 10:07:462247 我們可以看到在負(fù)反饋系統(tǒng)中,“擾動(dòng)-輸出”閉環(huán)傳遞函數(shù)和“給定-輸出”閉環(huán)傳遞函數(shù)中都包含開環(huán)傳遞函數(shù)T(s)這一因子,因而我們可以通過分析開環(huán)傳遞函數(shù)T(s)的特性來確定負(fù)反饋系統(tǒng)的特性。
2023-07-11 14:41:591673 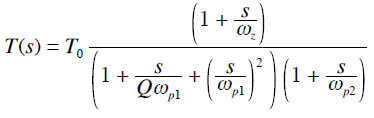
傳遞函數(shù)是經(jīng)典控制理論中最常用和最重要的數(shù)學(xué)模型,用傳遞函數(shù)方塊將控制系統(tǒng)全部變量聯(lián)系起來,描述各環(huán)節(jié)之間的信號傳遞關(guān)系的圖形,我們稱為系統(tǒng)傳遞函數(shù)方塊圖。
2023-11-17 15:59:47352 
傳遞函數(shù)是指表示系統(tǒng)的輸入和輸出的關(guān)系性,輸入和輸出的轉(zhuǎn)換函數(shù)。控制工程是指作為用評估傳遞函數(shù)系統(tǒng)的舉動(dòng)或穩(wěn)定性的手段。當(dāng)然,本網(wǎng)頁的主題是電源的傳遞函數(shù),電源設(shè)計(jì)計(jì)算出傳遞函數(shù),可評估響應(yīng)特性或
2018-11-28 14:38:22
伺服電動(dòng)機(jī)有哪幾種類型?
2021-11-15 06:21:10
伺服電動(dòng)機(jī)震動(dòng)的危害:伺服電動(dòng)機(jī)振動(dòng)會(huì)加速電動(dòng)機(jī)軸承磨損,使軸承的正常使用壽命大大縮短;伺服電動(dòng)機(jī)振動(dòng)將使繞組絕緣性能下降。使伺服電機(jī)端部綁扎松動(dòng),造成端部繞組產(chǎn)生相互磨擦,絕緣電阻降低,絕緣壽命縮短,嚴(yán)重時(shí)造成絕緣擊穿。造成所拖動(dòng)機(jī)械的損壞。
2018-12-10 11:07:15
電動(dòng)機(jī)振動(dòng)的危害電動(dòng)機(jī)振動(dòng)的原因如何查找振動(dòng)原因處理電機(jī)振動(dòng)的步驟
2021-02-05 07:30:31
電動(dòng)機(jī)有哪些分類
2021-03-12 06:17:58
在工業(yè)控制領(lǐng)域,電動(dòng)機(jī)是一個(gè)重要的研究方向,發(fā)電廠60%的能量都去驅(qū)動(dòng)電動(dòng)機(jī)來為人類服務(wù),可見電機(jī)的控制在工業(yè)以及軍事方面的重要性。電動(dòng)機(jī)分為直流電機(jī)和交流電機(jī),而交流電機(jī)包括同步交流電機(jī)和異步
2021-09-06 06:08:45
影響可控硅元件的導(dǎo)通,特別是同一電網(wǎng)中有多臺(tái)可控硅設(shè)備時(shí)。因此可控硅元件的故障率較高,因?yàn)樯婕暗诫娏﹄娮蛹夹g(shù),因此對維護(hù)技術(shù)人員的要求也較高。5、變頻器①變頻器是現(xiàn)代電動(dòng)機(jī)控制領(lǐng)域技術(shù)含量最高,控制功能最全
2018-11-01 10:58:01
電動(dòng)機(jī)應(yīng)用廣泛,下面為您揭曉目前電動(dòng)機(jī)重要的七大應(yīng)用領(lǐng)域:
2021-02-05 06:27:39
眾所周知,電動(dòng)機(jī)是重工業(yè)不可或缺的生產(chǎn)設(shè)備之一,現(xiàn)在國家提倡電動(dòng)機(jī)需節(jié)能、環(huán)保、高效,那么如何能在電動(dòng)機(jī)生產(chǎn)過程中降低能耗、節(jié)約電能、發(fā)揮其生產(chǎn)力呢?下面小編跟大家來簡述一下電動(dòng)機(jī)的節(jié)能措施。
2021-01-29 07:34:49
自控式同步電動(dòng)機(jī)磁阻同步電動(dòng)機(jī)永磁同步電動(dòng)機(jī)步進(jìn)電動(dòng)機(jī)
2021-08-27 06:15:54
AC伺服電動(dòng)機(jī)的構(gòu)造AC伺服電動(dòng)機(jī)在電動(dòng)機(jī)的反輸出軸側(cè)搭載有轉(zhuǎn)速探測器(編碼器),通過檢測轉(zhuǎn)子的位置和速度,可執(zhí)行高分辨率、高響應(yīng)定位運(yùn)行。編碼器是檢測電動(dòng)機(jī)轉(zhuǎn)速和位置的傳感器。發(fā)光二極管(LED
2023-03-20 16:49:35
三相自控式同步電動(dòng)機(jī)——無換向器電動(dòng)機(jī)其他同步電動(dòng)機(jī)
2021-09-03 07:20:19
三相交流伺服電動(dòng)機(jī)都有哪些故障?是什么原因造成的?怎樣去解決?
2021-09-26 07:16:34
交流伺服電動(dòng)機(jī)有哪幾種轉(zhuǎn)速控制方式?伺服電動(dòng)機(jī)的工作特性特點(diǎn)是什么?
2021-09-24 10:26:49
和調(diào)節(jié)特性外,還必須具有伺服性:即控制信號電壓強(qiáng)時(shí),電動(dòng)機(jī)轉(zhuǎn)速高;控制信號電壓弱時(shí),電動(dòng)機(jī)轉(zhuǎn)速低;若控制信號電壓等于零,則電動(dòng)機(jī)不轉(zhuǎn)。但是普通異步電動(dòng)機(jī)的轉(zhuǎn)速不是轉(zhuǎn)矩的單值函數(shù),而且只能
2018-10-10 18:09:15
自動(dòng)控制系統(tǒng)中作執(zhí)行元件,所以又稱為執(zhí)行電動(dòng)機(jī)。例如數(shù)控車床,刀具由伺服電動(dòng)機(jī)拖動(dòng),他會(huì)按照給定目標(biāo)的形狀拖動(dòng)刀具進(jìn)行切割器件。早期伺服電動(dòng)機(jī)輸出功率較小,功率范圍一般為0.1~100瓦,而目前伺服
2008-11-19 23:40:31
晶閘管型號KS20-8中的S表示什么意思?直接耦合放大電路產(chǎn)生零點(diǎn)飄移的主要原因是什么?他勵(lì)式直流伺服電動(dòng)機(jī)是怎樣接線的?
2021-09-24 07:41:46
任務(wù) 某設(shè)備上有一套伺服驅(qū)動(dòng)系統(tǒng),伺服驅(qū)動(dòng)器的型號為MR-J2S,伺服電動(dòng)機(jī)的型號為HF-KE13W1-S100,是三相交流同步伺服電動(dòng)機(jī),要求:壓下按鈕SB1時(shí),伺服電動(dòng)機(jī)帶動(dòng)系統(tǒng)X方向移動(dòng)
2023-03-03 15:37:03
控制對象。在自動(dòng)控制系統(tǒng)中,用作執(zhí)行元件,把所收到的電信號轉(zhuǎn)換成電動(dòng)機(jī)軸上的角位移或角速度輸出。分為直流和交流伺服電動(dòng)機(jī)兩大類,其主要特點(diǎn)是,當(dāng)信號電壓為零時(shí)無自轉(zhuǎn)現(xiàn)象,轉(zhuǎn)速隨著轉(zhuǎn)矩的增加而勻速下降。
2019-06-11 04:20:36
同步電動(dòng)機(jī)與異步電動(dòng)機(jī)的轉(zhuǎn)速有何不同?同步電動(dòng)機(jī)與異步電動(dòng)機(jī)轉(zhuǎn)動(dòng)的原理有何不同?同步電動(dòng)機(jī)與異步電動(dòng)機(jī)轉(zhuǎn)動(dòng)的外部特性和應(yīng)用上的區(qū)別在哪?
2021-07-29 08:02:14
本文小編給大家總結(jié)下電動(dòng)機(jī)幾個(gè)的檢查工作,以保證電動(dòng)機(jī)的正常運(yùn)轉(zhuǎn),防止燒毀,延長電動(dòng)機(jī)的工作壽命。
2021-01-21 06:58:46
1、電動(dòng)機(jī)直流缺陷檢測儀不能起動(dòng) 電動(dòng)機(jī)不能起動(dòng)的原因首要是因?yàn)殡娫次唇油ā⒇?fù)載過大、翻滾受阻、熔體(也包含熔片)熔斷等,這時(shí)首先要查看電源電路或附加的電器元件,首要是確保回路開關(guān)無缺、接線準(zhǔn)確
2015-08-15 14:59:40
感應(yīng)電動(dòng)機(jī)基本結(jié)構(gòu)感應(yīng)電動(dòng)機(jī)氣隙旋轉(zhuǎn)磁場和感應(yīng)電動(dòng)勢感應(yīng)電動(dòng)機(jī)的工作原理三相交流感應(yīng)異步電動(dòng)機(jī)
2021-02-02 07:58:21
本人初學(xué)開關(guān)電源,在學(xué)習(xí)中環(huán)路穩(wěn)定時(shí)遇到問題,覺得列寫拓?fù)涞?b class="flag-6" style="color: red">傳遞函數(shù)時(shí)沒有一個(gè)確切的準(zhǔn)則,比如說反激主回路中有個(gè)變壓器,這該怎么處理?這也導(dǎo)致了我在補(bǔ)償元件的設(shè)計(jì)的煩惱,希望各位大神多多指教。
2016-08-14 10:43:54
在這里,將介紹斜率的傳遞函數(shù)。以下的圖是指“傳遞函數(shù)和導(dǎo)出的基礎(chǔ)概念”中使用過的的圖2,接下來將對繼續(xù)上一節(jié)誤差放大器G1(S)的PWM和驅(qū)動(dòng)的部分G2(S)進(jìn)行介紹。在具有代表性的PWM控制技術(shù)
2018-11-30 11:47:32
??前面作為斜率的傳遞函數(shù),我們的導(dǎo)出“電壓模式的傳遞函數(shù)”,并進(jìn)行了“電流模式的考察”。這里將結(jié)合與電壓模型的對比來導(dǎo)出電流模式的傳遞函數(shù),總結(jié)電壓模式和電流模式的傳遞函數(shù)。電壓模式和電流模式
2018-11-30 11:43:42
無刷直流永磁電動(dòng)機(jī)(BLDCM)與自控式永磁同步電動(dòng)機(jī)(PMSM)的磁場有何區(qū)別?無刷直流永磁電動(dòng)機(jī)(BLDCM)與自控式永磁同步電動(dòng)機(jī)(PMSM)的特點(diǎn)和應(yīng)用有何不同?
2021-08-02 10:25:56
矩形波電流驅(qū)動(dòng)的永磁交流伺服電動(dòng)機(jī)稱為無刷直流伺服電動(dòng)機(jī),采用正弦波電流驅(qū)動(dòng)的永磁交流伺服電動(dòng)機(jī)稱為無刷交流伺服電動(dòng)機(jī)。 3.步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)器 步進(jìn)電動(dòng)機(jī)是將電脈沖信號變換為相應(yīng)的角位移或直線位移的元件
2015-01-23 14:44:31
學(xué)習(xí)模擬電路,最初學(xué)習(xí)的是線性時(shí)不變電路,在電路分析和模擬電路中,經(jīng)常要列寫出給定電路的傳遞函數(shù),而傳統(tǒng)兩種最基本的方法--節(jié)點(diǎn)法與網(wǎng)孔法,雖然萬能但并不實(shí)用,電路稍微復(fù)雜一點(diǎn)就要進(jìn)行麻煩的列方程
2019-04-20 19:35:35
步進(jìn)電動(dòng)機(jī)的結(jié)構(gòu)與原理
2019-10-08 14:28:36
如題。現(xiàn)在基本用的都是永磁交流伺服電動(dòng)機(jī),它優(yōu)點(diǎn)在哪里啊?感覺直流伺服電動(dòng)機(jī)簡單,而且便宜啊。
2015-01-23 15:26:17
直流伺服電機(jī)與普通他勵(lì)直流電動(dòng)機(jī)有何不同?電磁式直流伺服電機(jī)的工作原理是什么?直流伺服電動(dòng)機(jī)的機(jī)械特性是什么?永磁交流伺服電動(dòng)機(jī)同直流伺服電動(dòng)機(jī)比較,主要優(yōu)點(diǎn)有哪些?
2021-06-28 06:10:39
伺服電機(jī)有哪些類型?直流伺服電機(jī)的優(yōu)點(diǎn)和缺點(diǎn)是什么?什么是伺服電機(jī)?有幾種類型?工作特點(diǎn)是什么?交流伺服電機(jī)和無刷直流伺服電機(jī)在性能上有什么區(qū)別?永磁交流伺服電動(dòng)機(jī)同直流伺服電動(dòng)機(jī)比較有什么優(yōu)點(diǎn)?
2021-09-29 07:37:55
電磁式直流伺服電機(jī)的工作原理是什么?永磁交流伺服電動(dòng)機(jī)有什么優(yōu)點(diǎn)?
2021-09-27 06:41:45
永磁無刷電動(dòng)機(jī)可以看做是一臺(tái)用電子換向裝置取代機(jī)械換向的直流電動(dòng)機(jī),直流無刷電動(dòng)機(jī)主要由永磁電動(dòng)機(jī)本體、轉(zhuǎn)子位置傳感器和電子換向電路組成。
2019-10-16 09:00:50
公司有部分伺服電動(dòng)機(jī),電動(dòng)機(jī)沒有散熱風(fēng)扇,因其價(jià)格較貴,怕它因散熱不好都分別加裝了一臺(tái)散熱風(fēng)扇,想問問大俠,有沒有這個(gè)必要。
2023-12-11 06:57:40
1.3伺服電動(dòng)機(jī)機(jī)械系統(tǒng)由力或力矩控制并遵循動(dòng)力學(xué)模型,該動(dòng)力學(xué)模型依賴許多未知的系數(shù)。由運(yùn)動(dòng)學(xué)模型表述的相同的機(jī)械系統(tǒng)由位置、速度或加速度控制,運(yùn)動(dòng)學(xué)模型取決于已知的幾何系數(shù)而且比較容易寫成
2021-09-17 09:19:06
直流伺服電動(dòng)機(jī)是指什么?直流伺服電動(dòng)機(jī)的結(jié)構(gòu)可分為哪幾類?與傳統(tǒng)型的直流伺服電動(dòng)機(jī)相比,低慣量型直流伺服電動(dòng)機(jī)具有哪些優(yōu)點(diǎn)?
2021-07-13 08:20:35
直流伺服電動(dòng)機(jī)的應(yīng)用直流伺服電機(jī)的特性較交流伺服電機(jī)硬。通常應(yīng)用于功率稍大的系統(tǒng)中,如隨動(dòng)系統(tǒng)中的位置控制等。
2008-11-19 23:39:24
轉(zhuǎn)換機(jī)構(gòu)固有的傳動(dòng)鏈條體積大、效率低、能耗高、精度差、污染環(huán)境等缺點(diǎn)。 直線伺服電動(dòng)機(jī)可以認(rèn)為是旋轉(zhuǎn)電動(dòng)機(jī)在結(jié)構(gòu)方面的一種變形,它是將傳統(tǒng)圓筒型電動(dòng)機(jī)的定于剖開拉直,變定子永磁鐵的封閉磁場為開放磁場
2018-08-31 14:55:26
精密減速機(jī)上伺服電動(dòng)機(jī)噪聲測量應(yīng)在空載穩(wěn)定運(yùn)行狀態(tài)下進(jìn)行;對于直流伺服電動(dòng)機(jī),測定時(shí)其轉(zhuǎn)速和電壓應(yīng)保持額定值;對交流伺服電動(dòng)機(jī)應(yīng)保持供電頻率相供電電壓為額定值;用靜止整流電源供電時(shí),電源應(yīng)符合有關(guān)
2018-10-11 11:43:29
(1)直流有刷伺服電動(dòng)機(jī)(BDC) 圖1是直流有刷伺服電動(dòng)機(jī)典型的結(jié)構(gòu)圖片。 圖1 直流有刷伺服電動(dòng)機(jī)典型的結(jié)構(gòu)圖片 從圖1中可以看出,該類型電動(dòng)機(jī)有如下基本特點(diǎn):①定子永磁鐵被固定
2018-08-31 14:41:08
做自控原理實(shí)驗(yàn),是數(shù)字隨動(dòng)系統(tǒng)。里面用到了很多集成運(yùn)放,并且都是反向輸入,按模擬電路的知識(shí)傳遞函數(shù)應(yīng)該是K=- R2/R1,但是實(shí)驗(yàn)講義上給的一律都是K= R2/R1,而且按講義上的方法做的校正都是
2023-03-17 10:02:26
高次諧波對電動(dòng)機(jī)的影響高次諧波對電動(dòng)機(jī)影響有哪些防范措施?
2021-02-24 06:30:17
介紹了一種獲得電動(dòng)執(zhí)行機(jī)構(gòu)傳遞函數(shù)的新方法。該方法從分析電動(dòng)執(zhí)行機(jī)構(gòu)的各個(gè)組成部分出發(fā),最終推導(dǎo)出以供電電壓為輸入、反饋電壓為輸出的開環(huán)傳遞函數(shù),并通過求解微
2009-03-17 15:36:01 16
16 本文首先給出了Butterworth 標(biāo)準(zhǔn)傳遞函數(shù),然后提出了一種設(shè)計(jì)狀態(tài)反饋系統(tǒng)的方法,該方法包括:利用線性變換將能控系統(tǒng)化為能控標(biāo)準(zhǔn)形,使能控標(biāo)準(zhǔn)形系統(tǒng)的閉環(huán)傳遞函數(shù)等
2009-06-11 09:45:3918 本文研究了用電壓矢量變頻器和感應(yīng)電動(dòng)機(jī)構(gòu)成的變頻電動(dòng)機(jī)系統(tǒng)。通過對該閉環(huán)控制系統(tǒng)數(shù)學(xué)模型的建立,推導(dǎo)出了它的傳遞函數(shù)。它有著與可控硅直流調(diào)速系統(tǒng)極其相似的傳遞函
2009-06-12 15:59:2021 伺服電動(dòng)機(jī)
伺服電動(dòng)機(jī)(servo motor)的功能是將所輸入的電壓信號轉(zhuǎn)換為軸上的角位移或角速度輸出,其轉(zhuǎn)速和轉(zhuǎn)向隨輸入電壓信號的大
2008-11-19 23:35:432972 
伺服電動(dòng)機(jī)可分為兩類:交流伺服電動(dòng)機(jī),直流伺服電動(dòng)機(jī)
直流伺服電動(dòng)機(jī)的應(yīng)用直流伺服電機(jī)的特性較交流伺服電機(jī)硬。通常應(yīng)用于功率稍大的
2008-11-19 23:37:181336 直流伺服電動(dòng)機(jī)的工作原理: 直流伺服電動(dòng)機(jī)的結(jié)構(gòu)與直流電動(dòng)機(jī)基本相同。只是為減小轉(zhuǎn)動(dòng)慣量,電機(jī)做得細(xì)長一些。所
2008-11-19 23:38:0913915 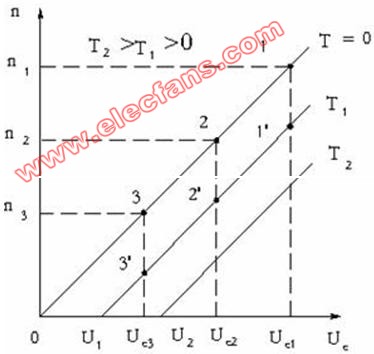
電壓控制器的傳遞函數(shù)
如下圖所示為控制器(補(bǔ)償網(wǎng)絡(luò))的原理圖,
2009-02-19 11:06:101642 
交流伺服電動(dòng)機(jī)的應(yīng)用已很普遍。國內(nèi)先從控制器開始開發(fā),再到驅(qū)動(dòng)器,現(xiàn)在也有類似的電動(dòng)機(jī)出現(xiàn)在市場上。隨
2010-06-19 09:11:571483 
傳遞函數(shù)有開環(huán)傳遞函數(shù)和閉環(huán)傳遞函數(shù),同樣,零點(diǎn)有開環(huán)零點(diǎn)和閉環(huán)零點(diǎn)。
他們有什么不同,又各自起到什
2010-12-24 12:05:084009 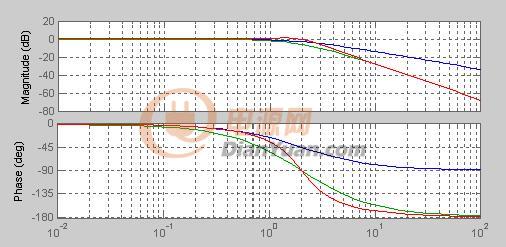
伺服系統(tǒng)傳遞函數(shù)的全數(shù)字測量方法介紹了基于全數(shù)字模式的頻域測定法,在基于傳統(tǒng)自動(dòng)控制理論測量 傳遞函數(shù) 的基礎(chǔ)上,省略了頻率分析儀、測速機(jī)和示波器等設(shè)備,并于文中實(shí)驗(yàn)部
2011-07-25 14:53:5629 主要內(nèi)容:
1.傳遞函數(shù)的定義;
2.求法:i)利用微分方程描述,由拉氏變換得到;
ii)復(fù)數(shù)阻抗法;
3.典型環(huán)節(jié)的傳遞函數(shù)。
2016-01-18 14:56:090 Proteus之伺服電動(dòng)機(jī)角度控制,很好的Proteus資料,快來下載學(xué)習(xí)吧。
2016-04-19 09:54:260 交流永磁伺服系統(tǒng)技術(shù)講座第五講交流永磁伺服電動(dòng)機(jī)_二_
2016-04-26 10:47:089 交流永磁伺服系統(tǒng)技術(shù)講座第五講交流永磁伺服電動(dòng)機(jī)_一_
2016-04-26 10:47:0819 伺服電動(dòng)機(jī)PPT課件,感興趣可以看看。
2016-06-08 14:28:430 直流伺服電動(dòng)機(jī)是自動(dòng)控制系統(tǒng)中具有特殊用途的直流電動(dòng)機(jī),又稱執(zhí)行電機(jī),它能夠把輸入的電壓信號變換成軸上的角位移和角速度等機(jī)械信號。直流伺服電動(dòng)機(jī)的工作原理、基本結(jié)構(gòu)及內(nèi)部電磁關(guān)系與一般用途的直流電動(dòng)機(jī)相同。
2017-06-16 10:15:4613347 傳遞函數(shù)的時(shí)域辨識(shí)
2017-10-26 09:30:530 傳遞函數(shù)的頻域辨識(shí)
2017-10-26 09:23:570 交流伺服電動(dòng)機(jī)的轉(zhuǎn)子通常做成鼠籠式,但為了使伺服電動(dòng)機(jī)具有較寬的調(diào)速范圍、線性的機(jī)械特性,無“自轉(zhuǎn)”現(xiàn)象和快速響應(yīng)的性能,它與普通電動(dòng)機(jī)相比,應(yīng)具有轉(zhuǎn)子電阻大和轉(zhuǎn)動(dòng)慣量小這兩個(gè)特點(diǎn)。
2018-09-26 10:15:004296 傳遞函數(shù)的學(xué)習(xí)教程說明包括了:傳遞函數(shù)的概念與定義,傳遞函數(shù)的性質(zhì),典型環(huán)節(jié)及其傳遞函數(shù)
2020-01-09 10:25:1216 兩相交流伺服電動(dòng)機(jī)和直流伺服電動(dòng)機(jī)在自動(dòng)控制系統(tǒng)中都被廣泛使用,下面就對這兩類電機(jī)進(jìn)行簡單的比較。
2021-02-11 16:56:008174 簡要回顧一些基本概念:傳遞函數(shù)在數(shù)學(xué)上表示濾波器的頻域輸入到輸出行為;可以用變量s來表示傳遞函數(shù),它代表復(fù)雜的頻率,當(dāng)需要計(jì)算特定頻率的幅度和相位響應(yīng)時(shí)可以用jω代替s ;傳遞函數(shù)的標(biāo)準(zhǔn)化形式就像
2021-06-12 18:05:008366 
本來這期應(yīng)該講Buck的尖峰的,不過遇到些問題,所以就往后拖一拖吧,這次來個(gè)簡單點(diǎn)兒的。 來看看傳遞函數(shù),也就是我們經(jīng)常看到的H(s)。 傳遞函數(shù)是怎么定義的呢? 百科是這么定義的: 【傳遞函數(shù)
2021-06-30 11:23:5571958 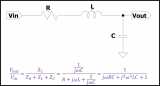
? 交流伺服電動(dòng)機(jī)的結(jié)構(gòu) ? ? ? ?交流伺服電動(dòng)機(jī)的結(jié)構(gòu)主要可分為兩部分,即定子部分和轉(zhuǎn)子部分。 ? ? ? ?其中定子的結(jié)構(gòu)與旋轉(zhuǎn)變壓器的定子基本相同,在定子鐵心中也安放著空間互成90度電角度
2021-08-02 17:03:159606 基于Ansoft的永磁交流伺服電動(dòng)機(jī)轉(zhuǎn)矩波動(dòng)分析(現(xiàn)代電源技術(shù))-基于Ansoft的永磁交流伺服電動(dòng)機(jī)轉(zhuǎn)矩波動(dòng)分析 ? ? ? ? ? ? ?
2021-08-31 11:08:006 伺服電動(dòng)機(jī)定義伺服電動(dòng)機(jī)也稱為執(zhí)行電動(dòng)機(jī),在控制系統(tǒng)中用作執(zhí)行元件,將輸入的電壓控制信號轉(zhuǎn)換為軸上輸出的角位移和角速度,以驅(qū)動(dòng)控制對象。
2022-10-08 15:51:39979 傳遞函數(shù)表示線性定常系統(tǒng)自身,將輸入信號變換成輸出信號的能力。這是線性定常系統(tǒng)自身的特點(diǎn),一個(gè)不同的輸入就會(huì)有一個(gè)不同的輸出。輸入信號本身不影響傳遞函數(shù),傳遞函數(shù)是我這個(gè)系統(tǒng)自身決定的。
2022-10-25 09:27:317260 伺服電動(dòng)機(jī)(servo motor)與普通電動(dòng)機(jī)的區(qū)別在于,伺服電動(dòng)機(jī)及驅(qū)動(dòng)器是一個(gè)伺服控制系統(tǒng)(servo control system),即可以精確地跟隨輸入信號的閉環(huán)反饋控制系統(tǒng)。控制
2022-11-01 14:17:43777 伺服電動(dòng)機(jī)(servo motor)與普通電動(dòng)機(jī)的區(qū)別在于,伺服電動(dòng)機(jī)及驅(qū)動(dòng)器是一個(gè)伺服控制系統(tǒng)(servo control system),即可以精確地跟隨輸入信號的閉環(huán)反饋控制系統(tǒng)。控制量是電動(dòng)機(jī)的轉(zhuǎn)角或速度、力矩。
2022-11-01 14:37:03974 介紹伺服電動(dòng)機(jī)及其控制技術(shù)
2022-11-07 11:37:042 交流伺服電動(dòng)機(jī)的工作原理與分相式單相異步電機(jī)雖然相似,但前者的轉(zhuǎn)子電阻比后者大得多,所以伺服電動(dòng)機(jī)與單機(jī)異步電動(dòng)機(jī)相比。
2023-01-10 16:00:272810 傳遞函數(shù)的頻率特性:這里通過“傳遞函數(shù)的頻率特性”來考慮傳遞函數(shù)。和前項(xiàng)的“基爾霍夫定律和阻抗”中的解說有密切的關(guān)系所以希望合在一起閱讀。首先,請看圖6。電阻和電容器組成簡單的閉合電路。首先,嘗試計(jì)算出本電路的傳遞函數(shù)。
2023-02-24 09:51:141616 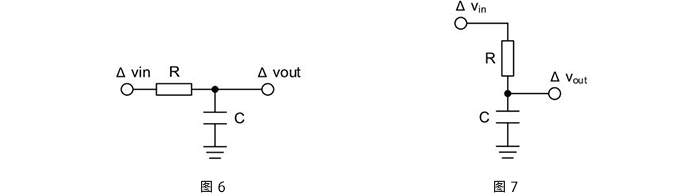
接下來進(jìn)入新的篇章“各轉(zhuǎn)換器的傳遞函數(shù)”。將使用上一篇章“狀態(tài)空間平均法”的思路,導(dǎo)出各種控制模式的傳遞函數(shù)。
2023-02-24 09:51:14481 
前面已經(jīng)推導(dǎo)出了降壓轉(zhuǎn)換器和升壓轉(zhuǎn)換器的傳遞函數(shù)。本文將推導(dǎo)升降壓轉(zhuǎn)換器的傳遞函數(shù)。升降壓轉(zhuǎn)換器存在控制方式,不過在這里將抽取其中的2個(gè)控制方式來推導(dǎo)傳遞函數(shù)。本文是第一個(gè)。
2023-02-24 09:51:15784 
上一篇和上上篇介紹了“升降壓轉(zhuǎn)換器的傳遞函數(shù)導(dǎo)出示例”的其1和其2。本文將探討“開關(guān)的導(dǎo)通電阻對傳遞函數(shù)的影響”。
2023-02-24 09:51:16570 Zi是分子多項(xiàng)式零點(diǎn),稱為傳遞函數(shù)零點(diǎn),Pj是分母多項(xiàng)式零點(diǎn),稱為傳遞函數(shù)極點(diǎn)。系數(shù)K*=b0/a0稱為傳遞函數(shù)系數(shù)或根軌跡增益。
2023-03-09 16:51:4514105 
如何列寫無源網(wǎng)絡(luò)傳遞函數(shù)
2023-03-10 16:15:373039 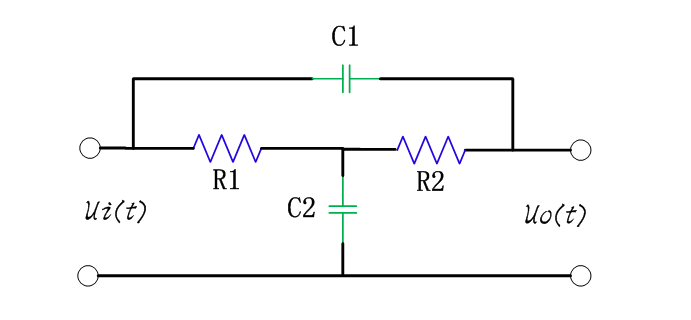
如何用兩種不同的方法列寫雙容水槽傳遞函數(shù)
2023-03-10 16:20:111642 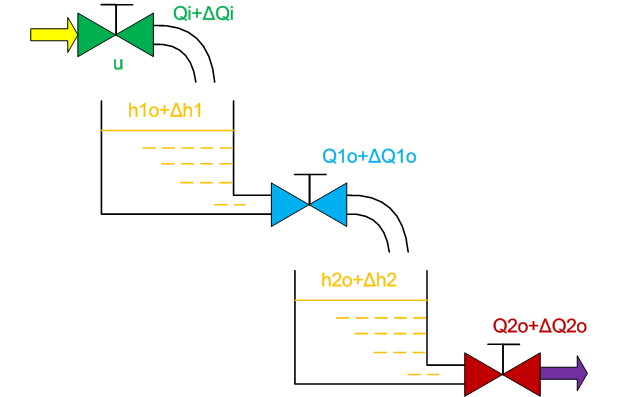
永磁伺服電動(dòng)機(jī)屬于交流伺服的范疇,電機(jī)的結(jié)構(gòu)為定子是繞組線圈,轉(zhuǎn)子是永磁體,里面沒有碳刷結(jié)構(gòu),通過電子換向器進(jìn)行轉(zhuǎn)子的換向,它的優(yōu)點(diǎn)有很多,包括: 1、永磁伺服電動(dòng)機(jī)功率因數(shù)高。 2、永磁伺服電動(dòng)機(jī)
2023-03-21 15:05:05560 伺服電動(dòng)機(jī)又稱執(zhí)行電動(dòng)機(jī),在自動(dòng)控制系統(tǒng)中,用作執(zhí)行元件,把所收到的電信號轉(zhuǎn)換成電動(dòng)機(jī)軸上的角位移或角速度輸出。分為直流和交流伺服電動(dòng)機(jī)兩大類,其主要特點(diǎn)是,當(dāng)信號電壓為零時(shí)無自轉(zhuǎn)現(xiàn)象,轉(zhuǎn)速隨著轉(zhuǎn)矩的增加而勻速下降。
2023-03-22 11:30:41716 直線伺服電動(dòng)機(jī)可以認(rèn)為是旋轉(zhuǎn)電動(dòng)機(jī)在結(jié)構(gòu)方面的一種變形,它是將傳統(tǒng)圓筒型電動(dòng)機(jī)的定于剖開拉直,變定子永磁鐵的封閉磁場為開放磁場,并根據(jù)不同行程的需求拼接而成,而動(dòng)子(運(yùn)動(dòng)部)線圈的纏繞方式發(fā)生變化。
2023-09-05 15:24:51334 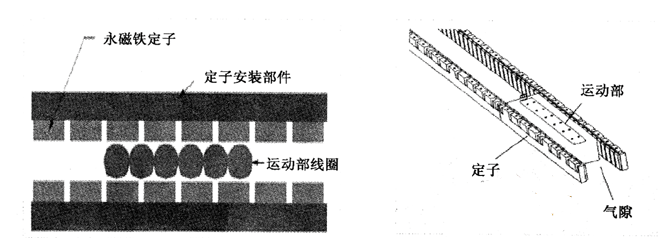
之前提出了兩種標(biāo)準(zhǔn)方法來為一階RC低通濾波器制定s域傳遞函數(shù)。簡要回顧一些基本概念:傳遞函數(shù)在數(shù)學(xué)上表示濾波器的頻域輸入到輸出行為;
2023-09-19 15:30:41742 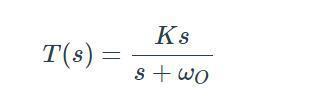
傳遞函數(shù)是一種描述系統(tǒng)動(dòng)態(tài)行為的數(shù)學(xué)模型,用于分析和設(shè)計(jì)復(fù)雜系統(tǒng)的行為。在實(shí)際應(yīng)用中,建立傳遞函數(shù)對于控制工程、機(jī)械工程、電子工程等領(lǐng)域都具有重要的意義。
2023-09-28 16:29:111056 
 電子發(fā)燒友App
電子發(fā)燒友App






















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論