步進(jìn)電機(jī)都是通過脈沖信號(hào)控制的,一般都是一個(gè)用來產(chǎn)生一定頻率脈沖的單片機(jī)(脈沖頻率用來控制速度),經(jīng)過信號(hào)隔離放大(達(dá)到驅(qū)動(dòng)電機(jī)的電壓)來驅(qū)動(dòng)控制步進(jìn)電機(jī)。
2013-08-19 10:04:28 4162
4162 對(duì)步進(jìn)電機(jī)的控制通常使用PWM控制,改變頻率來控制速度,然后統(tǒng)計(jì)脈沖個(gè)數(shù)知道電機(jī)當(dāng)前位置,可以很容易實(shí)現(xiàn)加減速規(guī)劃,或者不考慮加減速平穩(wěn)性,直接以小于最大啟動(dòng)速度的速度啟動(dòng),發(fā)完給定個(gè)脈沖后直接
2022-10-14 11:28:383482 先來看一下硬件原理圖,可看到控制步進(jìn)電機(jī)的管腳分別為:GPIO6[2]、GPIO6[3]、GPIO6[4]和GPIO1[15]。使用的是一路四相五線步進(jìn)電機(jī),使用的電機(jī)驅(qū)動(dòng)芯片是L9110。
2023-08-04 14:45:412092 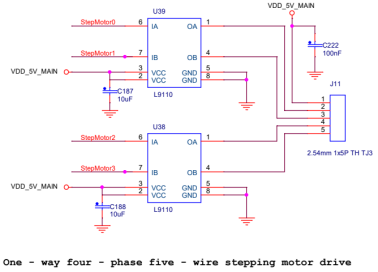
目標(biāo)功能:實(shí)現(xiàn)遙控步進(jìn)電機(jī)完成位置控制 輸入信號(hào):RC脈沖信號(hào),即搖桿在從低到高產(chǎn)生的等頻率,脈沖高電平時(shí)間為1100us到1900us之間 利用此信號(hào)完成電機(jī)的位置偏轉(zhuǎn),說白了就是電機(jī),忽略電機(jī)
2021-09-07 07:08:42
步進(jìn)電機(jī)控制通常采用什么方法實(shí)現(xiàn)?
2021-09-30 07:15:35
,步進(jìn)電動(dòng)機(jī)又稱脈沖電動(dòng)機(jī)。簡(jiǎn)單地說,就是把電轉(zhuǎn)化成動(dòng)力,由此我們可以很容易的想到高中時(shí)學(xué)到的電磁鐵原理,讓線圈產(chǎn)生磁,通過中間的磁鐵作用力旋轉(zhuǎn)。步進(jìn)電機(jī)相對(duì)于其它控制用途電機(jī)的最大區(qū)別是,它接收數(shù)字控制
2021-07-07 06:33:56
信號(hào)則會(huì)將偏差減至最低伺服電機(jī):靠伺服控制電路來控制電機(jī)的轉(zhuǎn)速,通過傳感器來控制轉(zhuǎn)動(dòng)位置。所以位置控制十分精確。而轉(zhuǎn)速也是可變的。舵機(jī)(電子舵機(jī)):舵機(jī)的主要組成部分為伺服電機(jī)。其中包含伺服電機(jī)
2021-06-28 08:46:34
現(xiàn)在想實(shí)現(xiàn)步進(jìn)電機(jī)的位置和速度控制,通過串行PID控制,有沒有那個(gè)大神給講解一下,外環(huán)的位置怎么控制內(nèi)環(huán)的速度,有例程就更好了,謝謝!
2017-03-21 14:38:36
直流電機(jī)分為哪幾種?什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)可以實(shí)現(xiàn)電機(jī)轉(zhuǎn)速和位置的精確控制嗎?
2021-09-14 06:10:07
什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)有哪幾種?步進(jìn)電機(jī)是怎么控制的?
2021-10-08 07:28:20
步距角。這一線性關(guān)系的存在,加上步進(jìn)電機(jī)只有周期的誤差而無累積誤差等特點(diǎn)。使得在速度、位置等控制領(lǐng)域用步進(jìn)電機(jī)來控制變的非常的簡(jiǎn)單。雖然步進(jìn)電機(jī)已被廣泛地應(yīng)用,但步進(jìn)電機(jī)并不能像普通的直流電機(jī)...
2021-07-08 07:57:57
的,可以通過控制脈沖個(gè)數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的,同時(shí)可以通過控制脈沖頻率,來控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度,從而達(dá)到調(diào)速的目的。步進(jìn)電機(jī)在工作時(shí)的位置和速度信號(hào)不反饋給控制系統(tǒng),所以不需要反饋
2022-10-30 11:39:10
步進(jìn)電機(jī)區(qū)別于其他控制用途電機(jī)的最大特點(diǎn)是,它可接受數(shù)字控制信號(hào)(電脈沖信號(hào))并轉(zhuǎn)化成與之相對(duì)應(yīng)的角位移或直線位移,因而本身就是一個(gè)完成數(shù)字模擬轉(zhuǎn)化的執(zhí)行元件。而且它能進(jìn)行開環(huán)位置控制,輸入一個(gè)脈沖
2018-10-26 11:02:58
。有效電壓與PWM占空度成正比。當(dāng)?shù)玫竭m當(dāng)?shù)恼鲹Q向時(shí),BLDC的扭矩速度特性與一下直流電機(jī)相同。可以用可變電壓來控制電機(jī)的速度和可變轉(zhuǎn)矩。 功率晶體管的換向實(shí)現(xiàn)了定子中的適當(dāng)繞組,可根據(jù)轉(zhuǎn)子位置生成最佳
2021-04-27 06:30:00
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。可以通過控制脈沖數(shù)來控制步進(jìn)電機(jī)的角位移量,從而達(dá)到準(zhǔn)確定位的目的,同時(shí)可以通過控制脈沖頻率來控制電機(jī)的速度和加速度,從而達(dá)到調(diào)速的目的。由于步進(jìn)電機(jī)控制簡(jiǎn)單、運(yùn)行可靠,所以被廣泛應(yīng)用于各種控制裝置中。
2019-08-19 07:31:47
STM32控制步進(jìn)電機(jī)的怎么實(shí)現(xiàn)平滑調(diào)速
2023-10-23 06:39:41
轉(zhuǎn)和加減速。我現(xiàn)在想通過labview發(fā)送信號(hào),按照我的要求來控制電(當(dāng)電機(jī)正向轉(zhuǎn)動(dòng),推進(jìn)負(fù)載運(yùn)動(dòng)到一定位置時(shí),有一個(gè)傾角傳感器反饋信號(hào)給上位機(jī),上位機(jī)再發(fā)送信號(hào)給電機(jī)使其反轉(zhuǎn)),這個(gè)過程該如何實(shí)現(xiàn)?labview是否只是通過串口給單片機(jī)發(fā)送一個(gè)信號(hào),而控制程序還是需要對(duì)單片機(jī)進(jìn)行編寫?謝謝各位!
2013-04-19 09:14:15
使用labview2102版本,開發(fā)一個(gè)簡(jiǎn)單的程序,實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)控制,可以控制步進(jìn)電機(jī)從低速按比例加速或按加加速度加速到高速,最后加速停止到指定為位置。視頻地址:
2019-11-12 15:08:00
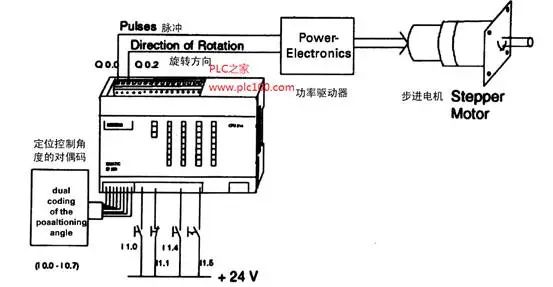
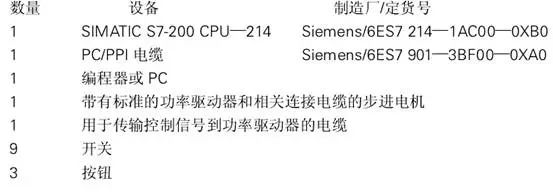
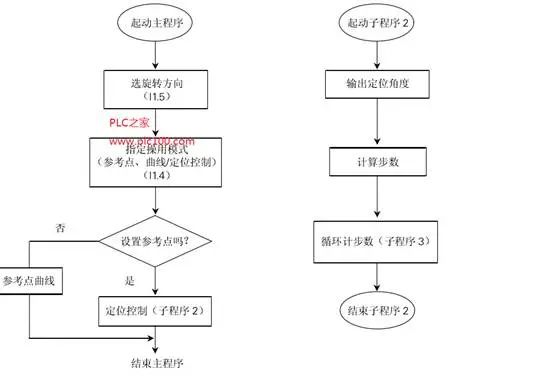
那些在運(yùn)行過程中移動(dòng)距離和速度均確定的具體設(shè)備,小編認(rèn)為采用PLC通過步進(jìn)電機(jī)驅(qū)動(dòng)器來控制步進(jìn)電機(jī)的運(yùn)轉(zhuǎn)是一種理想的技術(shù)方案。步進(jìn)電機(jī)的特點(diǎn):(1)步進(jìn)電機(jī)的角位移與輸入脈沖數(shù)嚴(yán)格...
2021-06-29 06:53:19
命令實(shí)現(xiàn)正轉(zhuǎn),反轉(zhuǎn);通過按鍵實(shí)現(xiàn)正傳,反轉(zhuǎn);通過命令和按鍵實(shí)現(xiàn)任意位置的停轉(zhuǎn);通過命令實(shí)現(xiàn)步進(jìn)電機(jī)加速,減速。
2021-07-09 06:42:43
位置控制,我的理解就是輸入一個(gè)目標(biāo)的位置,然后電機(jī)通過一個(gè)加減速的過程后到達(dá)目標(biāo)位置. 這個(gè)加減速的方法,目前了解的有'梯形'和'S形'. 梯形:加速度固定,但是在啟動(dòng),到達(dá)最大速度和停止
2021-07-08 07:05:12
什么是步進(jìn)電機(jī),它是怎么控制的?步進(jìn)電機(jī)的種類有哪些?怎么實(shí)現(xiàn)步進(jìn)電機(jī)的正轉(zhuǎn)反轉(zhuǎn)?
2021-10-20 06:18:48
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),輸入脈沖總數(shù)控制步進(jìn)電機(jī)的總旋轉(zhuǎn)角度,電機(jī)的速度由每秒輸入脈沖數(shù)目所決定,因此易實(shí)現(xiàn)機(jī)械位置的精準(zhǔn)控制。
2019-10-24 08:08:21
如何實(shí)現(xiàn)AccelStepper庫(kù)步進(jìn)電機(jī)控制ardiuno?
2021-10-20 07:57:26
如何實(shí)現(xiàn)同時(shí)控制多個(gè)步進(jìn)電機(jī)
2023-11-02 10:06:11
前言 上一講我們已成功實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的正反轉(zhuǎn)動(dòng)控制,并簡(jiǎn)單的通過調(diào)節(jié)節(jié)拍間的延時(shí)時(shí)間實(shí)現(xiàn)了簡(jiǎn)單的轉(zhuǎn)速控制(開環(huán)),這一節(jié)將繼續(xù)給大學(xué)介紹在STM32中通過定時(shí)器方式來實(shí)現(xiàn)節(jié)拍間的精確延時(shí)操作,并
2021-07-08 08:30:20
如何通過步進(jìn)電機(jī)去控制機(jī)械臂?如何通過步進(jìn)電機(jī)去實(shí)現(xiàn)一種插補(bǔ)算法?
2021-07-08 06:54:36
本文介紹通過FPGA實(shí)現(xiàn)的步進(jìn)電機(jī)控制器。該控制器可以作為單片機(jī)或DSP的一個(gè)直接數(shù)字控制的外設(shè),只需向控制器的控制寄存器和分頻寄存器寫入數(shù)據(jù),即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。
2021-04-29 06:05:44
如何通過linuxcnc和ighethercat來實(shí)現(xiàn)對(duì)伺服電機(jī)的控制?
2021-10-09 07:56:49
如何通過正點(diǎn)原子的STM32板來實(shí)現(xiàn)輪轂電機(jī)的控制?
2021-10-19 06:59:51
如何通過脈沖調(diào)制PWM來控制電機(jī)的電壓從而實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制?
2021-10-19 06:47:40
如何通過電機(jī)的霍爾傳感器讀取位置實(shí)現(xiàn)位置環(huán)控制
2024-03-19 08:04:46
如何使用主從定時(shí)器方式控制PWM波輸出給步進(jìn)電機(jī)驅(qū)動(dòng)器來控制步進(jìn)電機(jī)?
2021-11-18 07:59:44
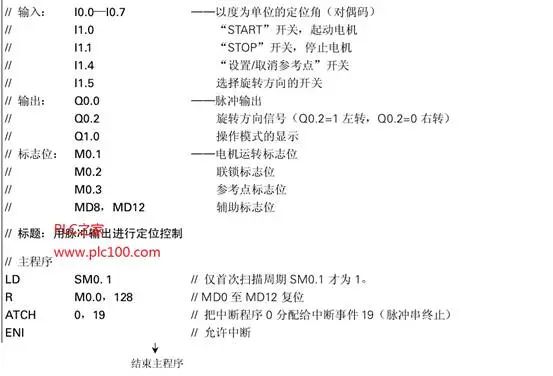
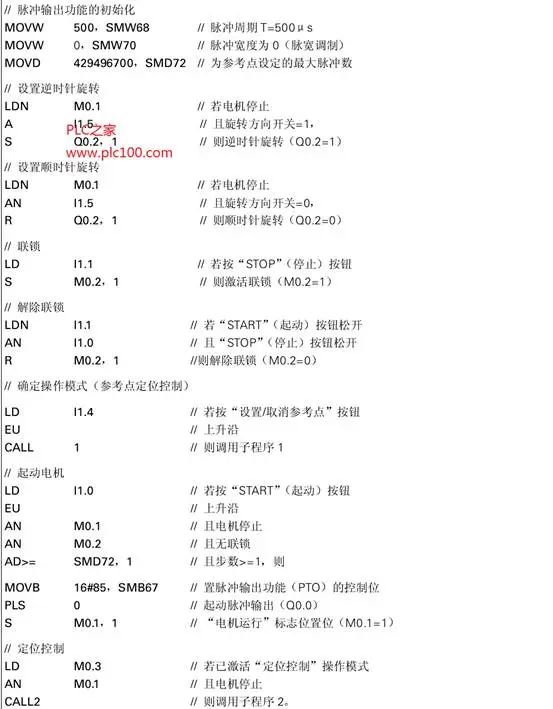
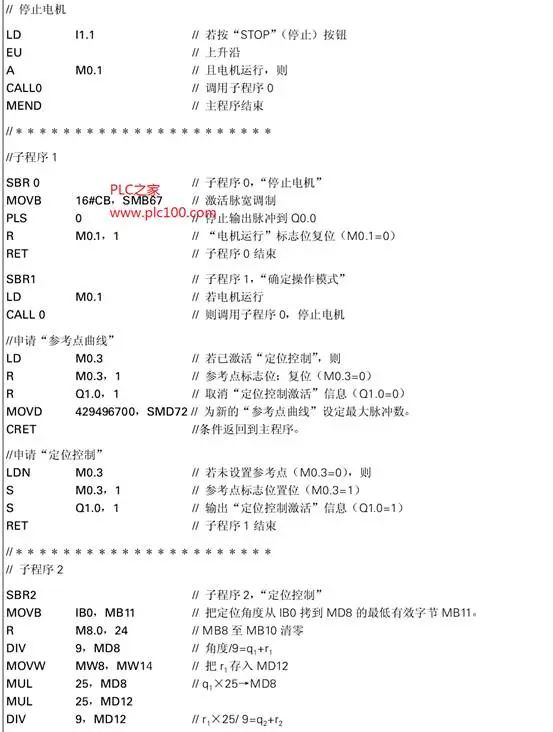
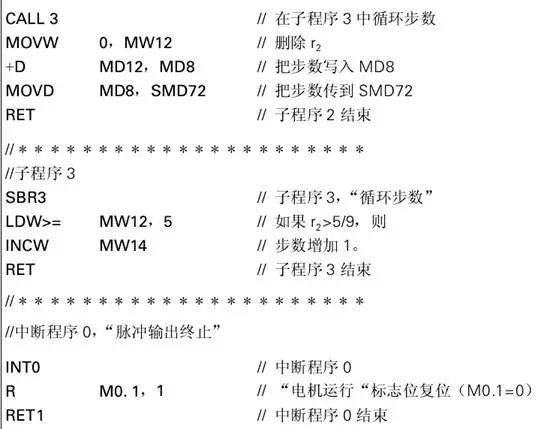
S7 200的PTO脈沖輸出功能有何作用?如何去實(shí)現(xiàn)步進(jìn)電機(jī)的XY精確位置控制?
2021-10-11 06:16:44
如何去實(shí)現(xiàn)步進(jìn)電機(jī)的加減速?步進(jìn)電機(jī)絕對(duì)位置的調(diào)用方法是什么?
2021-09-27 09:05:23
一、工程簡(jiǎn)介1、本工程實(shí)現(xiàn)的功能:用FPGA通過兩個(gè)按鍵控制步進(jìn)電機(jī)的啟動(dòng)和停止,硬件包括:黑金開發(fā)板、步進(jìn)電機(jī)和Vince步進(jìn)電機(jī)驅(qū)動(dòng)器和電腦。2、FPGA通過控制電機(jī)驅(qū)動(dòng)器來控制步進(jìn)電機(jī)的旋轉(zhuǎn)
2021-07-08 07:41:16
如何用光柵編碼盤實(shí)現(xiàn)步進(jìn)電機(jī)的位置控制?我想用光柵編碼盤實(shí)現(xiàn)步進(jìn)電機(jī)是否頂?shù)筋^即頂不動(dòng)了!
2023-03-24 10:56:29
如何輕松地實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制?
2021-10-15 06:02:04
怎么才能實(shí)現(xiàn)高精度的步進(jìn)電機(jī)位置控制
2023-10-13 07:40:50
控制步進(jìn)電機(jī)加速和減速是如何實(shí)現(xiàn)的
2023-10-15 07:00:48
如何實(shí)現(xiàn)步進(jìn)電機(jī)的位置反饋
2023-10-15 12:28:05
怎樣利用esp8266通過驅(qū)動(dòng)器來控制步進(jìn)電機(jī)呢?有誰有這方面的資料嗎
2021-06-29 08:36:42
用速度來做閉環(huán)控制。3.加速度環(huán),就是用加速度來做閉環(huán)控制。這三種控制策略都能實(shí)現(xiàn)拓達(dá)步進(jìn)電機(jī)的定位控制。但是速度環(huán)和加速度環(huán)不僅可以控制位置還能實(shí)現(xiàn)步進(jìn)電機(jī)的速度和加速度的控制;而且速度環(huán)和加速度環(huán)
2018-08-25 10:05:53
labview編程使步進(jìn)電機(jī)與位置傳感器來控制氣門升程的自動(dòng)調(diào)節(jié)
2017-04-10 18:13:15
求通過溫度傳感器來控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)的圖和程序
2015-04-10 13:33:04
實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的位置控制,為了取得較好的控制效果,采用PID控制算法。系統(tǒng)有較好的人機(jī)交互界面,編程簡(jiǎn)單,根據(jù)不同的要求可隨時(shí)調(diào)整控制方式。 1 系統(tǒng)組成及工作原理 系統(tǒng)由一臺(tái)計(jì)算機(jī)、一臺(tái)步進(jìn)電機(jī)
2019-04-09 09:40:01
一用通過運(yùn)動(dòng)采集卡來控制步進(jìn)電機(jī)相比, 本文采用的計(jì)算機(jī)并口作為連接機(jī)和步進(jìn)電機(jī)驅(qū)動(dòng)器的通訊媒介來傳輸脈沖信號(hào)的方式, 不僅價(jià)格低廉, 而且更加容易推廣。 2.系統(tǒng)控制的研究方案 2.1系統(tǒng)總體
2019-05-08 06:15:33
在工業(yè)自動(dòng)化中,步進(jìn)電機(jī)的應(yīng)用非常的廣泛,例如工業(yè)機(jī)器人、3D打印機(jī)、計(jì)算機(jī)硬盤等都有步進(jìn)電機(jī)的身影。傳統(tǒng)的步進(jìn)電機(jī)可以控制轉(zhuǎn)子的角度位置,而不需要傳感器來控制位置,是一種開環(huán)控制系統(tǒng),在這樣的控制
2022-11-12 11:24:12
本文介紹的是通過對(duì)步進(jìn)電機(jī)的控制程序設(shè)計(jì),實(shí)現(xiàn)了用軟件對(duì)步進(jìn)電機(jī)進(jìn)行升、降速控制。
2009-04-02 15:21:27 25
25 小激光器實(shí)驗(yàn)系統(tǒng)有多臺(tái)混合式步進(jìn)電機(jī)和反應(yīng)式步進(jìn)電機(jī)需要控制,無論是靶丸的空間位置調(diào)節(jié),還是光路中波片的調(diào)節(jié)都離不開步進(jìn)電機(jī)的精確控制。通過PCL839 運(yùn)動(dòng)控制卡以及
2009-06-24 09:41:5618 提出了一種基于PLC的四相步進(jìn)電機(jī)控制的方法,介紹了控制系統(tǒng)的設(shè)計(jì)方案及其軟硬件的實(shí)現(xiàn)方法。實(shí)現(xiàn)對(duì)四相步進(jìn)電機(jī)的轉(zhuǎn)速控制、正反轉(zhuǎn)控制、以及步數(shù)控制。提出設(shè)計(jì)總體方
2009-08-11 11:14:5089 基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng):通過ATMEL89C51單片機(jī)對(duì)步進(jìn)電機(jī)進(jìn)行控制,主要介紹了步進(jìn)電機(jī)控制器、驅(qū)動(dòng)電路和LED顯示電路的設(shè)計(jì),實(shí)現(xiàn)了步進(jìn)電機(jī)的開環(huán)控制。在步進(jìn)電機(jī)
2009-08-25 18:27:01102 閉環(huán) 控 制 中的反饋檢測(cè)采用電流波形檢測(cè)方式。通過檢測(cè)電機(jī)繞組的電壓和電流的波動(dòng),產(chǎn)生和機(jī)械位置相對(duì)應(yīng)的脈沖作為反饋信號(hào)控制步進(jìn)電機(jī)。步進(jìn)電機(jī)工作時(shí),不論導(dǎo)通還
2010-01-12 17:19:16126 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL 為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA 內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速
2010-01-18 14:52:31314 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速、減
2010-07-13 16:14:4045 提出了一種基于PLC的四相步進(jìn)電機(jī)控制的方法,介紹了控制系統(tǒng)的設(shè)計(jì)方案及其軟硬件的實(shí)現(xiàn)方法。實(shí)現(xiàn)對(duì)四相步進(jìn)電機(jī)的轉(zhuǎn)速控制、正反轉(zhuǎn)控制、以及步數(shù)控制。提出設(shè)計(jì)總體方案
2010-07-21 09:31:1761 FPGA在步進(jìn)電機(jī)控制中的應(yīng)用
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。可以通過控制脈沖數(shù)來控制步進(jìn)電機(jī)的角位移量,從而達(dá)到準(zhǔn)確定位的目的,同時(shí)可
2009-12-24 16:52:261645 
1種單片機(jī)實(shí)現(xiàn)步進(jìn)電機(jī)的加、減速控制,下來看看
2016-04-26 11:14:109 由PLC與伺服電機(jī)組成一個(gè)系統(tǒng),通過PLC控制伺服電機(jī),實(shí)現(xiàn)機(jī)構(gòu)的原點(diǎn)回歸、相對(duì)定位和絕對(duì)定位功能
2017-11-13 06:01:0032048 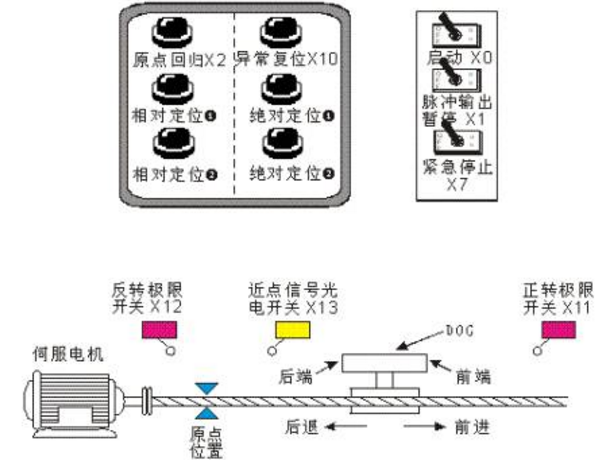
對(duì)步進(jìn)電機(jī)的控制是經(jīng)濟(jì)型數(shù)控系統(tǒng)開發(fā)時(shí)的一項(xiàng)重要內(nèi)容,其中對(duì)步進(jìn)電機(jī)運(yùn)動(dòng)過程中的升 降速控制是重點(diǎn)。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。
2018-10-26 09:23:0018048 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速和停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過
2019-10-24 07:54:003016 
步進(jìn)電機(jī)失步的原因和對(duì)策 步進(jìn)電機(jī)可以根據(jù)脈沖數(shù)和脈沖頻率來對(duì)電機(jī)實(shí)現(xiàn)開環(huán)控制位置和速度,是一種便宜、簡(jiǎn)單好用的控制類電機(jī),在自動(dòng)化控制領(lǐng)域得到越來越廣泛的應(yīng)用。但由于步進(jìn)電機(jī)不是閉環(huán)控制,選型或者
2020-06-28 17:25:1512072 步進(jìn)電機(jī)控制系統(tǒng)主要由單片機(jī)、鍵盤LED、驅(qū)動(dòng)/放大和PC上位機(jī)等4個(gè)模塊組成,其中PC機(jī)模塊是軟件控制部分,該控制系統(tǒng)可實(shí)現(xiàn)的功能:1)通過鍵盤啟動(dòng)/暫停步進(jìn)電機(jī)、設(shè)置步進(jìn)電機(jī)的轉(zhuǎn)速和改變步進(jìn)電機(jī)
2019-03-27 14:37:023946 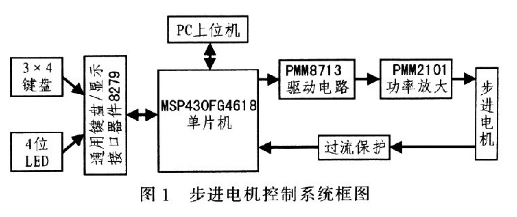
步進(jìn)電機(jī)是帶有許多內(nèi)齒的無刷直流電機(jī),通過周圍的銅線圈磁性鎖定到位。與無刷電機(jī)不同,為步進(jìn)電源供電電機(jī)不會(huì)轉(zhuǎn)動(dòng)。相反,它鎖定到給定輸入指定的位置,順時(shí)針或逆時(shí)針轉(zhuǎn)一小步。
2019-07-26 09:32:1632645 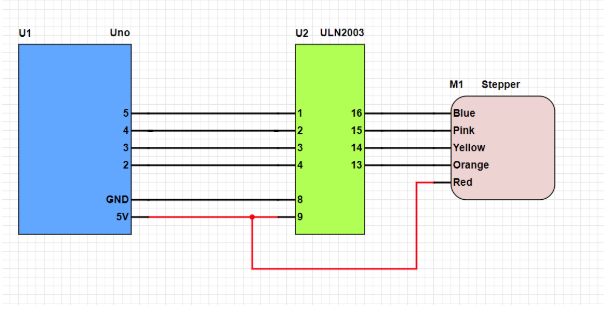
,極大地減少了外圍元件的使用。同時(shí),采用V HDL 語(yǔ)言控制可以根據(jù)步進(jìn)電機(jī)的不同,改變模塊程序的參數(shù)就可以實(shí)現(xiàn)不同型號(hào)步進(jìn)電機(jī)的控制,有利于步進(jìn)電機(jī)的廣泛應(yīng)用。
2021-02-05 11:37:0027 本應(yīng)用筆記介紹了如何使用dsPIC33F電機(jī)控制系列DSC實(shí)現(xiàn)步進(jìn)電機(jī)的驅(qū)動(dòng)控制。
2021-04-02 14:47:2213 步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和
轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。由于步進(jìn)電機(jī)
無需使用位置傳感器僅通過開環(huán)控制即可實(shí)現(xiàn)準(zhǔn)確的定位而
被廣泛用于需要定位的設(shè)備中。
2023-01-13 10:47:30515 步進(jìn)電機(jī)是一種能夠按照特定步數(shù)進(jìn)行轉(zhuǎn)動(dòng)的電機(jī),它主要用于實(shí)現(xiàn)精確的位置控制。步進(jìn)電機(jī)的主要特點(diǎn)是其使用程序或外部信號(hào)控制旋轉(zhuǎn)角度,這樣可以使位置變化精確可控,從而實(shí)現(xiàn)精確的位置控制。
2023-02-28 18:12:342539 步進(jìn)電機(jī)通常有兩種控制方式:全步控制和微步控制。全步控制是通過給定定子上線圈的電流方向來控制步進(jìn)電機(jī)的運(yùn)動(dòng),從而讓轉(zhuǎn)子逐步旋轉(zhuǎn)。微步控制則是在全步控制的基礎(chǔ)上,通過改變定子上線圈電流的大小和方向,使得轉(zhuǎn)子旋轉(zhuǎn)的步長(zhǎng)更小,從而實(shí)現(xiàn)更精確的位置控制。
2023-03-03 11:02:472303 步進(jìn)電機(jī)是一種特殊的電動(dòng)機(jī),相較于傳統(tǒng)的直流電機(jī)或交流電機(jī),其具有以下幾個(gè)特點(diǎn):
高精度定位:步進(jìn)電機(jī)可以通過控制脈沖信號(hào)來實(shí)現(xiàn)準(zhǔn)確的位置定位,通常可達(dá)到0.9度或更小的步距角度,精度高于傳統(tǒng)電機(jī)。
2023-03-08 14:17:275778 步進(jìn)電機(jī)是一種特殊的電機(jī),可以通過輸入脈沖信號(hào)來控制它的位置和運(yùn)動(dòng)。步進(jìn)電機(jī)通常由電機(jī)本體和驅(qū)動(dòng)電路組成,驅(qū)動(dòng)電路負(fù)責(zé)將輸入的脈沖信號(hào)轉(zhuǎn)換為電機(jī)的運(yùn)動(dòng)控制信號(hào)。
2023-03-08 14:33:332951 步進(jìn)電機(jī)的旋轉(zhuǎn)速度可以通過控制脈沖信號(hào)的頻率和電機(jī)驅(qū)動(dòng)方式來實(shí)現(xiàn)。
脈沖頻率控制:步進(jìn)電機(jī)的旋轉(zhuǎn)速度與脈沖信號(hào)的頻率成正比,因此可以通過調(diào)整脈沖信號(hào)的頻率來控制電機(jī)的旋轉(zhuǎn)速度。一般來說
2023-03-08 17:03:123337 步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。由于步進(jìn)電機(jī)無需使用位置傳感器僅通過開環(huán)控制即可實(shí)現(xiàn)準(zhǔn)確的定位而被廣泛用??于需要定位的設(shè)備中。
2023-03-09 11:49:321227 
利用單片機(jī)實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制,編寫程序,用四路 I/O口實(shí)現(xiàn)環(huán)形脈沖的分配,控制步進(jìn)電機(jī)按固定方向連續(xù)轉(zhuǎn)
動(dòng)。同時(shí),要求按下“Positive(正轉(zhuǎn))”按鍵時(shí),控制步進(jìn)電機(jī)
2023-03-21 15:25:243 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一- 個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過
2023-03-21 11:01:202 又稱脈沖電動(dòng)機(jī)。
步進(jìn)電機(jī)相對(duì)于其它控制用途電機(jī)的最大區(qū)別是,它接收數(shù)字控制信號(hào)(電脈沖信號(hào))并轉(zhuǎn)化成與之相對(duì)應(yīng)的角位移或直線位移,它本身就是一個(gè)完成數(shù)字模式轉(zhuǎn)化的執(zhí)行元件。而且它可開環(huán)位置控
制,輸入一個(gè)脈沖
2023-03-22 14:27:591 步進(jìn)電機(jī)基本上以開環(huán)電路驅(qū)動(dòng),用于位置控制。換句話說,步進(jìn)電機(jī)以外的電機(jī)尤其是高精度的步進(jìn)電機(jī)之外并沒有做開環(huán)控制定位的,而用開環(huán)電路驅(qū)動(dòng)的電機(jī)只有步進(jìn)電機(jī)。例如無刷電機(jī), 首先為切換相,需要測(cè)出
2023-03-22 09:47:362 一、步進(jìn)電機(jī)的控制使用LD語(yǔ)言實(shí)現(xiàn) ? ? ? ?在該程序段中,涉及X、Y軸動(dòng)作有,單次相對(duì)位置運(yùn)動(dòng)、點(diǎn)動(dòng)、回零、當(dāng)前位置設(shè)為零位、停止等。 ? ? ? ? ? ? ?二、按照預(yù)設(shè)路徑進(jìn)行
2023-03-23 11:42:000 步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)時(shí)就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一
個(gè)固定的角度(稱為“步距角”),其旋轉(zhuǎn)以固定的角度運(yùn)行。可以通過控制脈沖個(gè)數(shù)來控制
2023-03-23 10:34:222 目標(biāo):
1、指定簡(jiǎn)單的電機(jī)控制協(xié)議,支持通過串口通訊對(duì)多步進(jìn)電機(jī)進(jìn)行運(yùn)動(dòng)控制
2、支持詳細(xì)參數(shù)輸入的運(yùn)動(dòng)控制模式:控制方向、轉(zhuǎn)速、加減速率、細(xì)分等
3、支持位置控制模式,按照協(xié)議格式,輸入電機(jī)編號(hào)和位置,對(duì)多電機(jī)進(jìn)行控制
2023-03-23 10:23:134 本篇來介紹電機(jī)的位置環(huán)控制,實(shí)現(xiàn)電機(jī)快速準(zhǔn)確地轉(zhuǎn)動(dòng)到指定位置。回顧上篇,電機(jī)速度PID控制的結(jié)構(gòu)圖如下,目標(biāo)值是設(shè)定的速度,通過編碼器獲取電機(jī)的轉(zhuǎn)速作為反饋,實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制。再來看電機(jī)位置PID
2023-05-06 11:50:367 信號(hào)來控制電機(jī)的轉(zhuǎn)動(dòng)角度和速度。 步進(jìn)伺服是一種基于步進(jìn)電機(jī)的改進(jìn)型產(chǎn)品,其工作原理是在步進(jìn)電機(jī)上增加了閉環(huán)控制系統(tǒng),以實(shí)現(xiàn)更高的精度和穩(wěn)定性。步進(jìn)伺服可以通過反饋控制器獲取電機(jī)的實(shí)際位置和速度信息,并與設(shè)
2023-06-13 08:30:02494 步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。由于步進(jìn)電機(jī)無需使用位置傳感器僅通過開環(huán)控制即可實(shí)現(xiàn)準(zhǔn)確的定位而被廣泛用于需要定位的設(shè)備中。步進(jìn)電機(jī)
2023-08-29 08:08:451349 
步進(jìn)電機(jī)是一種直接將電脈沖轉(zhuǎn)化為機(jī)械運(yùn)動(dòng)的機(jī)電裝置,通過控制施加在電機(jī)線圈上的電脈沖順序、頻率和數(shù)量,可以實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的轉(zhuǎn)向、速度和旋轉(zhuǎn)角度的控制。在不借助帶位置感應(yīng)的閉環(huán)反饋控制系統(tǒng)的情況下
2023-09-25 08:08:42646 步進(jìn)電機(jī)加減速時(shí)間一般如何設(shè)定?步進(jìn)電機(jī)加減速是通過改變哪個(gè)參數(shù)實(shí)現(xiàn)的? 步進(jìn)電機(jī)是一種常用的電動(dòng)機(jī)類型,特點(diǎn)是相對(duì)于其他類型的電動(dòng)機(jī)具有精準(zhǔn)的位置控制能力,是自動(dòng)化控制領(lǐng)域廣泛應(yīng)用的一種電機(jī)
2023-10-13 17:39:35989 基于步進(jìn)電機(jī)驅(qū)動(dòng)原理,對(duì)步進(jìn)電機(jī)驅(qū)動(dòng)方式進(jìn)行分析,提出了基于西門子S7-1200系列PLC的步進(jìn)電機(jī)位置控制裝置的電氣系統(tǒng)硬件接線及軟件設(shè)計(jì)。通過測(cè)試,該裝置能對(duì)位置進(jìn)行精確控制及狀態(tài)監(jiān)控,在光伏發(fā)電追光系統(tǒng)中可用于光伏板的控制,也適用于PLC運(yùn)動(dòng)控制教學(xué)實(shí)訓(xùn),在自動(dòng)化裝置中有較好的推廣價(jià)值。
2023-10-23 14:38:162584 
該項(xiàng)目利用51單片機(jī)實(shí)現(xiàn)了一個(gè)步進(jìn)電機(jī)控制系統(tǒng),可以實(shí)現(xiàn)步進(jìn)電機(jī)的正反轉(zhuǎn)、加減速、啟動(dòng)和停止,并通過LCD顯示電機(jī)的工作狀態(tài)。通過該系統(tǒng),你可以控制步進(jìn)電機(jī)啟動(dòng)、旋轉(zhuǎn)的方向和速度。
2023-12-06 16:39:22969 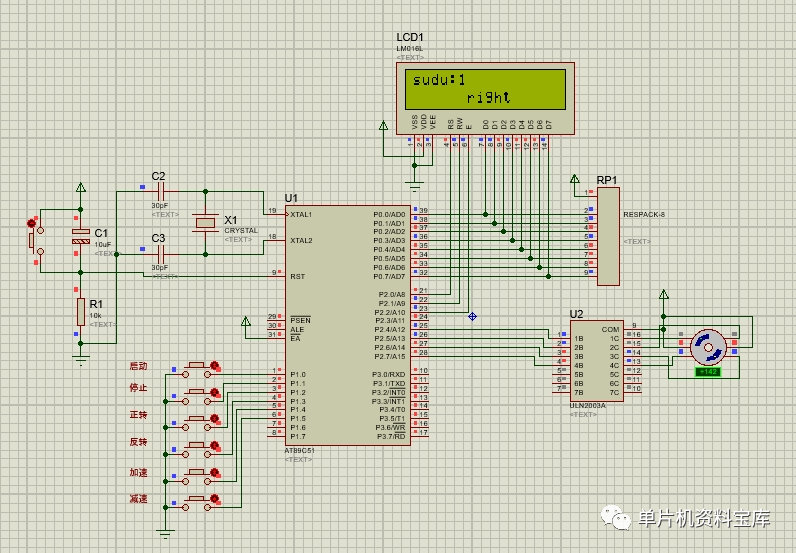
中,我們將詳細(xì)介紹如何使用Arduino來控制步進(jìn)電機(jī)的代碼。 步進(jìn)電機(jī)通常用于需要精確控制角度和位置的應(yīng)用中,例如3D打印機(jī)、數(shù)控銑床和機(jī)器人等。通過使用Arduino來控制步進(jìn)電機(jī),我們可以輕松實(shí)現(xiàn)自動(dòng)化系統(tǒng),提高生產(chǎn)效率和準(zhǔn)確性。 要控制
2024-02-14 16:29:00319 步進(jìn)電機(jī)是一種在控制系統(tǒng)中常見的電機(jī)類型,它以步進(jìn)角度為單位進(jìn)行旋轉(zhuǎn),并且可以精確控制位置和速度。在許多應(yīng)用領(lǐng)域,如精密儀器、印刷設(shè)備和醫(yī)療設(shè)備中,步進(jìn)電機(jī)都得到廣泛使用。 為了實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的精確
2024-01-19 10:50:22506 :全步進(jìn)控制是步進(jìn)電機(jī)最基本的控制方式。它通過控制電流的方向和大小來控制電機(jī)的轉(zhuǎn)動(dòng)。具體來說,當(dāng)電流按照順時(shí)針方向流過第一個(gè)線圈時(shí),電機(jī)會(huì)向前轉(zhuǎn)動(dòng)一個(gè)固定的角度,當(dāng)電流反向流過第一個(gè)線圈時(shí),電機(jī)會(huì)向后轉(zhuǎn)動(dòng)同
2024-01-22 17:18:18318 什么是步進(jìn)電機(jī)的細(xì)分控制?步進(jìn)電機(jī)為什么要細(xì)分,如何細(xì)分? 步進(jìn)電機(jī)的細(xì)分控制是一種控制技術(shù),通過對(duì)電機(jī)驅(qū)動(dòng)信號(hào)的細(xì)分來實(shí)現(xiàn)提高電機(jī)精度和減小振動(dòng)、噪音的目的。步進(jìn)電機(jī)是一種常用的電機(jī)類型,它通過
2024-02-18 09:39:32700
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論