在CAN網絡中,所有節點的數據收發共享一條總線。當面對未知的多節點CAN總線網絡時,如何準確分析各節點間的通信協議呢?
2018-02-27 09:29:27 15232
15232 
在ISO 11898-2和ISO 11898-3中分別規定了兩種CAN總線結構(在BOSCH CAN2.0規范中,并沒有關于總線拓撲結構的說明):高速CAN總線和低速CAN總線,區別表如下所示。
2023-04-07 09:30:181836 
“0”。CAN總線采用二進制不歸零(NRZ)編碼方式,所以總線上不是“0”,就是“1”。但是CAN協議并沒有具體定義這兩種狀態的具體實現方式,如圖7-7所示。 (10)故障界定(Confinement
2014-04-27 15:16:02
請教一下,CAN總線的問題,目前有個項目,總結點數大概在200個左右,一根總線的話總長度在400米左右。看了兩款CAN總線驅動器TJA1050T和MCP2551,最大節點數好像都只有110個左右
2015-07-18 16:26:33
請教一下,CAN總線的問題,目前有個項目,總結點數大概在200個左右,一根總線的話總長度在400米左右。看了兩款CAN總線驅動器TJA1050T和MCP2551,最大節點數好像都只有110個左右
2015-07-18 16:23:23
CAN總線使用不歸零(NRZ)的位填充。有兩種不同的信令狀態:顯性(邏輯0)和隱性(邏輯1)。這些信令狀態對應于所在物理層(存在幾種不同的物理層)的某種電平。模塊以線與邏輯連接到總線:哪怕只有一個節點發送邏輯0使得總線處于顯性狀態,那么不管有多少隱形狀態的節點傳送,則整個總線都處于顯性狀態。
2019-05-23 07:35:47
據傳輸時,CAN 總線有兩種邏輯值:顯性值(dominant)和隱性值(recessive)。如果同時傳輸顯性值和隱性值時,總線上的最終結果是顯性值。在線與(wired-AND)總線連接方式中,顯性值用邏輯“0”表示,隱性值用邏輯“1”表示。
2018-12-14 14:37:44
“0”。CAN總線采用二進制不歸零(NRZ)編碼方式,所以總線上不是“0”,就是“1”。但是CAN協議并沒有具體定義這兩種狀態的具體實現方式,如圖7-7所示。 (10)故障界定(Confinement
2014-04-18 16:36:30
構成3節點通信也正常。但是,當ARM開發板與ECU同時掛載到CAN總線上時,就會出現通信異常。問題2:ARM開發板(節點1,收發器:TJA1040)與MCU(節點2,收發器:vp230)兩節點進行
2019-07-01 19:20:56
數據,從而也能夠減輕總線控制器的工作量。換句話說,總線上數據幀的ID通過待接收節點的驗收濾波后是吻合的,是可以被接收的。 那么,總線控制器是如何進行驗收濾波的呢?驗收濾波分單濾波和雙濾波。標準幀和擴展幀由于ID長度不同,它們的兩種濾波也有所區別。
2019-08-20 08:12:59
裝置ECU之間交換信息,形成汽車電子控制網絡。比如:發動機管理系統、變速箱控制器、儀表裝備、電子主干系統中,均嵌入CAN控制裝置。 一個由CAN 總線構成的單一網絡中,理論上可以掛接無數個節點。實際
2017-10-19 11:12:46
CAN2.0A給出了CAN報文的標準格式,CAN2.0B給出了標準格式和擴展格式兩種。CAN總線最高傳輸速率可達1Mbps(通信距離最長40m),如果降低傳輸速率,其直接通信的最遠距離可達10km(速率
2021-05-13 06:00:00
集中化總線控制,所有主要通信,包括總線讀取 (許可)控制,在系統中分幾次完成。這是實現有較高可靠性的通信系統的唯一方法。2、CAN的報文格式在總線中傳送的報文,每幀由7部分組成。CAN協議支持兩種報文格式
2015-11-05 17:17:31
號輸出到CAN總線上,CAN總線上的節點都可以決定自己是否需要總線上的數據。具體的管教定義如下:信號表示CAN總線采用不歸零碼位填充技術,也就是說CAN總線上的信號有兩種不同的信號狀態,分別是顯性
2018-09-21 20:32:41
can節點,理論上,STM32就可以接入100多個串口設備了。但是,只使用一個【can串口】模塊,是無法使串口設備與STM32通信的,因為單片機都是TTL電平(0~3.3或5V),是無法與can總線(差分電平2.3V)通信的,所以必須有一個模塊能夠把單片機發出的信號轉換為CAN
2021-08-19 07:14:58
總線上的數據采用不歸零編碼方式(NRZ),可具有兩種互補的邏輯值之一:顯性及隱性。CAN總線中各節點使用相同的位速率。它的每位時間由同步段、傳播段、相位緩沖段1及相位緩沖段2組成。發送器在同步段前改變
2016-11-06 17:00:51
引 言作為一種成熟的現場總線技術,CAN(ControllerArea Network)總線在汽車、電力、機械、化工等工業控制領域得到了極為廣泛的應用。CAN協議標準中規定了CAN總線支持的兩種傳輸
2018-12-04 10:41:09
為了擴展VME總線和CAN總線的應用范圍,充分利用兩種總線的不同傳輸特點,采用了模塊設計方法,提出一種基于FPGA和MCU的總線轉換方案。該方案給出了FPGA與上位VME總線部分的VME總線接口
2019-06-28 08:24:19
、實時性和靈活性方面具有獨特的技術優勢,主要特點如下:? CAN 總線是一種多主總線,總線上任意節點可在任意時刻主動地向網絡上其他節點發送信息而不分主次,因此可在各節點之間實現自由通信。? CAN
2018-12-13 14:26:31
在MSP430上如何去使用ADPCM庫?介紹兩種MSP430的解決方案
2021-06-08 06:27:03
本文提出一種基于LPC2294微控制器,使用μCLinux作為操作系統的CAN主節點軟硬件設計方案。主節點通過擴展SRAM、FLASH提高了系統的性能,采用帶隔離功能的CAN收發器增強了CAN總線節點的抗干擾能力,外接以太網控制器實現了計算機遠程監控。
2021-05-25 06:59:34
。整個系統由主站節點、分布式溫度測量節點兩部分組成。由于基于CAN總線的溫度測量節點是一種分布式、實時的通信系統,可采用主從方式通信,其特點就是系統中任一節點設一為主站節點,其余均為從站節點,主站節點
2018-11-13 10:38:08
沒有調試。項目概述:利用STM32作為主控制芯片,設計出利用CAN總線傳輸數據的通信節點,在查閱STM32和CAN總線等相關文獻和資料基礎上,確定節點的總體設計方案,主要包括電源模塊、微控制器模塊、氣體傳感器模塊、LCD模塊、報警模塊等組成【資源下載】下載地址如下(851):https://docs
2021-07-19 07:18:56
使用MCP2515以及TJA1050構成CAN節點通信使用can收發器TJA1050芯片和CAN協議控制器MCP2515構成CAN節點,這里選用PIC16F877A型號單片機作為外部輸入連接裝置
2021-11-25 07:13:01
CANScope分析儀是什么?如何快速判斷CAN總線的故障節點?
2021-05-20 06:44:41
占用總線傳輸時間,所以導致其他正常節點發送延遲或者無法發送,影響整車CAN總線正常運行環境。解決方案:主機廠必須要求節點A、B、C的工作電壓必須要工作在1.8V,乃至2.0V,這個問題便得以解決。 錯誤
2019-04-26 10:52:24
CAN總線是一種串行數據通信協議,其通信接口中集成了CAN協議的物理層和數據鏈路層功能,可完成對數據的成幀處理。CAN協議的一個最大特點是廢除了傳統的站地址編碼,而代之以對通信數據塊編碼,采用這種方法可使網絡內節點個數在理論上不受限制,還可使不同的節點同時收到相同的數據。
2019-10-28 08:31:56
CAN總線有哪些優點?CAN總線的工作原理是什么?怎樣去設計一種基于STM32F4的CAN總線多節點通信系統?
2021-06-30 07:41:27
針對系統通信可靠、實時性的要求,在交直流埋弧焊接通信控制中,提出了一種基于DSP的CAN總線通信控制方案,介紹了交直流埋弧焊電源系統結構原理的設計,并對基于DSP的CAN總線通信的協議設計、硬件電路設計以及軟件設計進行了較詳細說明,同時還提出了一種多幀數據準確通信的方案。
2021-05-28 06:31:48
簡略介紹了超聲探傷的基本原理,并在此基礎上提出了一種基于FPGA的A型數字式超聲系統的構成方式,著重介紹了系統的硬件構成。其中,基于FPGA的數字信號處理模塊從根本上解決了傳統A型探傷儀的采樣速度低、處理速度慢的問題。
2021-05-06 08:38:46
的隔離主要關注信號隔離與電源隔離。 1、信號隔離 常見的信號隔離技術有光耦和磁隔兩種。而在CAN總線上建議選用使用磁隔離的方案,因為磁隔離相對來說更為可靠,消除了光耦合器帶來的相關不確定的電流
2018-10-23 16:23:27
設計CAN通道時,有兩種方案可選:一種是CAN總線隔離收發模塊,另一種是分立器件自搭方案。這里介紹一下,兩個方案各自的優劣勢。一、設計1、分立方案電路設計涉及器件選型、原理圖和PCB圖的繪制
2021-07-23 06:51:30
我的CAN總線上,有兩個節點,都是以DSP為處理器。另外總線上還掛有一個CAN卡。在設備運行過程中,突然某一個節點掉線,而另一節點在正常工作。是否能判斷得出掉線節點存在問題,而CAN線沒有故障
2018-08-28 10:59:09
針對CAN總線傳輸距離問題的兩種解決方案
2012-08-16 16:13:23
文章介紹了一種基于CAN 總線的煤礦瓦斯報警節點系統的設計,給出了基于CAN 總線的智能監控節點網絡的一般結構,著重介紹了節點系統的軟硬件設計。關鍵詞:煤礦; 瓦斯傳感器;
2009-03-30 16:40:46 47
47 基于P87 C591的CAN總線系統智能節點設計Design of CAN System Intelligent Node Based on P87C591
給出了基于帶CAN控制器的單片8位微控制器P87C591的智能節點的硬件電路及軟件結構,詳細介
2009-03-30 16:55:4945 介紹CAN 總線控制器SJA1000; 給出其在CAN 總線系統節點中的應用方法、節點電路原理圖及初始化程序; 針對應用SJA1000 容易出現的問題進行了解說。
2009-05-13 16:43:3262 介紹一種以8051 微控制器和82527 獨立CAN 總線控制器為核心組成的CAN 總線智能傳感器節點的設計方法, 并給出其硬件原理圖和初始化程序。
2009-05-14 15:59:5414 CAN 總線作為一種現場總線,應用極為普及。本文給出了一種基于AT89C51 和SJA1000 的CAN 總線節點設計方法,并對軟硬件進行了相應的說明。關鍵詞:CAN 總線,SJA1000,單片機CAN(C
2009-05-25 13:26:1259 現場總線是目前自動化技術發展的一個熱點。本文介紹基于CAN總線的分布式控制網絡系統的設計方法,給出了Intel 80C196KC+SJA1000和PIC16F877+MCP2510兩種典型的CAN總線智能節點的硬件電
2009-06-01 10:33:0124 現場總線是目前自動化技術發展的一個熱點。本文介紹基于CAN 總線的分布式控制網絡系統的設計方法,給出了Intel 80C196KC+SJA1000 和PIC16F877+MCP2510兩種典型的CAN總線智能節點的硬件電路
2009-06-12 15:51:0521 CAN總線具有配置靈活、應用范圍廣的特點,C8051f040單片機功能強大,集成了CAN總線控制器。本文提出了一種基于C8051f040的CAN總線系統智能節點的設計方案,給出了相應的硬件和軟件
2009-06-17 11:18:4723 本文給出了一種由MCP250505 構成的無需外加CPU 的CAN 總線節點的設計方案,介紹了CAN 總線網絡節點的硬件設計和軟件設計,并對MCP25050 的特性以及相關協議作了詳細分析。實驗表明,
2009-06-22 08:41:4319 CAN總線上的智能節點是網絡上報文的接收和發送站,一般由單片機和可編程的CAN通信控制器組成。本文介紹了一種新型的獨立CAN 通信控制器MCP2515;給出其在CAN總線系統智能節
2009-06-26 10:38:51140 針對潛水電機工作環境復雜、故障率高、影響參數多等特點,本文介紹了一種基于CAN總線的潛水電機分布式監控系統的設計方案;給出了智能監控節點的硬件電路、軟件軟初始化
2009-07-01 15:00:4115 介紹了一種基于CAN 總線、采用雙CPU 結構的智能控制節點的設計,說明了該智能控制節點的工作原理并詳細闡述了其所具備的功能、硬件組成和軟件實現。此控制節點結構新穎,采
2009-07-08 15:19:5814 針對敏捷維修對底層數據采集的要求,采用CAN現場總線技術,提出了一種用于敏捷維修中的數據采集系統的構建方案。重點介紹了構成系統的關鍵部件PCI5121總線適配卡和溫度測量節
2009-07-11 11:19:2317 本文在將嵌入式實時操作系統μCOS-II 移植到S3C44B0 的基礎上,將CAN 總線通訊程序作為一個模塊植入μCOS-II 之中,形成一個CAN 總線智能節點。闡述了CAN 總線智能節點的設計思想,硬件
2009-08-06 10:35:3314 CAN(Control Area Network)總線技術是一種支持分布式實時控制的高安全性的串行總線。本文對CAN 控制網絡中重要的現場設備--智能節點的具體實現進行的研究,主要包括智能節點的軟件
2009-08-14 09:07:1811 摘要:介紹了基于CAN 總線的分布式果園氣象監測系統,重點描述了單片機P87C591的特點及以它為控制核心構成的監測網絡節點的實現。
2009-09-08 14:57:0422 CAN總線是一種應用廣泛的實時性現場總線,提出了基于具有ARM7TDMI內核的32位微控制器的CAN總線智能節點設計方案。詳細介紹了ARM控制器(LPC2294)的特點、智能節點的結構以及系統軟
2009-12-01 14:27:3518 CAN總線是一種應用極為普及的現場總線。文中提出了一種CAN總線通信接口的設計方案。CAN總線智能節點用單片機AT89S52和SJA1000控制器為核心組成。分別從硬件電路設計和SJA1000軟件
2010-01-25 15:04:2251 對CAN(Controller Area Network)/LIN(Local Interconnect Network)總線做了詳細介紹,設計了汽車CAN節點、LIN節點硬件電路,完成了CAN/LIN網關的硬件設計,LIN設計目標作為CAN的下層網絡,同CAN相結合構成汽
2010-07-13 17:10:3113 摘要:針對敏捷維修對底層數據采集的要求,采用CAN 現場總線技術,提出了一種用于敏捷維修中的數據采集系統的構建方案。重點介紹了構成系統的關鍵部件PCI5121 總線適配卡和溫
2010-09-08 10:59:5635 摘要:CAN總線上的節點是網絡上的信息接收和發送站;智能節點能通過編程設置工作方式、ID、地址、波特率等參數。它主要由單片機和可編程的CAN通信控制器組成。本文介紹這類節
2010-12-20 22:18:4044 針對當前CAN總線及J1939協議在汽車電子中的廣泛應用,給出一種通過配置在低成本CAN I/O擴展器MCP2502X/05X器件上實現J1939協議的CAN總線節點的設計方法。詳細介紹擴展節點的配置方法和
2010-12-29 18:08:4528 ?摘要:介紹了一種用單片機ADμC812、CAN總線控制器SJA1000和CAN總線驅動器POA82C250組成的CAN總線智能節點的設計方案,給出了該節點的硬件結構和軟件設計方法,同時介紹
2006-03-11 11:47:39949 
摘要:CAN總線是一種流行的實時性現場總線,文中提出了一種基于MSP430單片機,并以MCP2510為CAN控制器的智能節點設計方案,該方案利用MSP430通過標準SPI接口可實現對
2006-03-24 12:46:351234 
SPMC65單片機在CAN總線智能節點中的應用
本文主要介紹如何使用SPMC65P2404A單片機設計開發CAN總線
2009-09-19 10:45:14700 
介紹了CAN總線和P87C591單片機的特點,給出了基于P87C591單片機的信號采集節點的軟、硬件設計,指出了硬件電路設計中應注意的問題,在軟件設計中重點介紹了節點初始化、報文發
2010-12-10 10:04:102453 
設計了一種基于ARM7 TDMI 內核的32 位微控制器L PC2119 的CAN 節點方案,給出了相應的硬件電路圖,并通過與SJA1000 特點的對比分析,提出CAN 節點初始化、收發報文和總線異 常處理等軟件實現要
2011-06-02 17:42:0975 為引入CAN總線技術以實現運動控制系統的網絡化,提出了基于LPC2294的CAN總線主節點的硬件及軟件設計方案。硬件采用基于ARM7內核的微控制器LPC2294,使用CTM1050T作為CAN收發器,設計了帶
2011-06-21 15:17:1261 文章針對現有的模擬廣播系統存在抗干擾能力弱、傳輸距離短等不足,進行了基于CAN 總線的數字語音 通信系統 的研究。給出語音通信系統的總體構成,并對節點各模塊進行詳細設計。
2011-09-18 16:26:302983 
基于對CAN 總線控制器的功能分析, 并應用Verilog語言進行軟件設計, 從而實現CAN節點之間的通信功能。
2012-04-28 09:56:5413818 
基于CAN總線系統結構構成,通過工程實踐的具體應用以及對CAN控制器及收發器硬件結構的深入理解,并從通信的角度出發著重深入分析了CAN總線通信的節點同步機制、總線地址機制、總
2012-05-08 15:23:04404 CAN總線是一種應用廣泛的實時性現場總線。本文提出了一種基于具有ARM7DMI內核的32位ARM微控制器LPC2294的CAN總線智能節點設計方案。詳細介紹了ARM微控制器LPC2294和隔離CAN收發器CTM1050T的特
2012-05-29 09:27:063583 
本文主要介紹CAN總線智能節點的簡單設計。智能節點由89C5l型單片機、SJA1000型總線控制器、82C250型總線驅動器及PC構成。在實際應用中可以連接不同的傳感器件,完成數據的采集和傳輸。
2012-09-06 17:07:088509 
應用51單片機為控制核心結合其他的器件設計了一種能連接于CAN總線上的智能節點。通過單片機控制CAN總線控制器SJA1000,并進一步通過CAN總線收發器PCA82C250,實現該智能節點與CAN總線的
2013-01-10 16:54:57120 CAN總線上的智能節點是網絡上報文的接收和發送站一般由單片機和可編程的通信控制器組成 本文介紹了一種新型的獨立CAN 通信控制器給出其在CAN 總線系統智能節點中的一個應用實例" 硬件設計給出了節點的電路原理圖" 軟件設計給出了系統程序的設計流程圖"并對其作了簡要的說明。
2016-04-01 09:41:020 基于PIC18F458的CAN總線節點開發_張逸群。
2016-05-06 11:29:316 CAN總線通訊已經從汽車電子行業逐漸向各行各業鋪開使用了,例如軌道交通、礦井監控等。在設計CAN總線接口電路時需要注意,
對于提高CAN總線節點的可靠性而言,離不開隔離、總線阻抗匹配、總線保護等,在設計CAN節點時要注意這些點以提高總線電路可靠性和安全性。
2016-06-08 11:41:272862 一篇關于CAN總線接口電路硬件設計的文檔,很詳細,可以參考下
2016-07-01 16:45:4998 下面小編將以圖文的方式告訴大家如何模擬CAN總線節點,不足之處還望大神們積極補充。
2017-09-21 14:44:4312 為了擴展VME總線和CAN總線的應用范圍,充分利用兩種總線的不同傳輸特點,采用了模塊設計方法,提出一種基于FPGA和MCU的總線轉換方案。該方案給出了FPGA與上位VME總線部分的VME總線接口
2018-07-17 10:11:003239 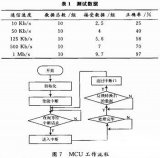
can總線的ID是指標識符。也就是一個can節點的地址或者說名字。網絡中識別某一節點的信息。can總線的節點id,分成標準幀和擴展幀兩種。標準幀的ID是11位,擴展幀的ID是29位。
2017-11-27 10:30:2998073 根據CAN 總線的特性, 給出了基于Cort ex-M3 內核的LM3S2965 芯片中CAN 總線節點的硬件電路、軟件實現框架及部分代碼。初始化代碼部分可以直接應用在其他CAN 總線的接口設計中。
2018-05-09 08:42:2822 用戶在使用CAN總線通信時,一般只需要接CAN_H和CAN_L兩根導線。但是導線畢竟都多少有些內阻,因此在使用導線傳輸信號時,肯定會存在一定的損耗,而CAN總線標準中也大概介紹了在不同波特率下CAN
2018-12-23 10:31:596348 CAN協議教程 介紹:CAN總線 CAN總線是廣播類型的總線。這意味著所有節點都可以偵聽到所有傳輸的報文。無法將報文單獨發送給指定節點;所有節點都將始終捕獲所有報文。但是,CAN硬件能夠提供本地過濾
2020-04-03 15:32:2213499 一種由8051單片機和82527獨立CAN總線控制器為核心構成的智能節點電路,在普通傳感器基礎上形成可接收8路模擬量輸入和智能傳感器節點。
2020-04-19 11:22:001645 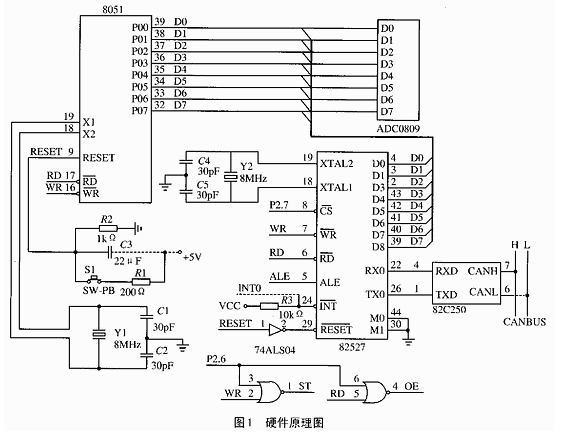
CAN總線節點軟件的設計與實現說明。
2021-04-19 16:59:1020 使用MCP2515以及TJA1050構成CAN節點通信使用can收發器TJA1050芯片和CAN協議控制器MCP2515構成CAN節點,這里選用PIC16F877A型號單片機作為外部輸入連接裝置
2021-11-16 20:21:0541 沒有調試。項目概述:利用STM32作為主控制芯片,設計出利用CAN總線傳輸數據的通信節點,在查閱STM32和CAN總線等相關文獻和資料基礎上,確定節點的總體設計方案,主要包括電源模塊、微控制器模塊、氣體傳感器模塊、LCD模塊、報警模塊等組成【資源下載】下載地址如下(851):https://docs
2021-12-24 19:30:1046 一個由CAN 總線構成的單一網絡中,理論上可以掛接無數個節點。實際應用中,節點數目受網絡硬件的電氣特性所限制。CAN 可提供高達1Mbit/s的數據傳輸速率,這使實時控制變得非常容易。
2023-06-11 09:41:451664 
一般來說,CAN總線2可以掛載的節點數量10到110之間。下面采用了64個節點測試數據傳輸的性能,出現的問題如下。
2023-06-14 09:42:231191 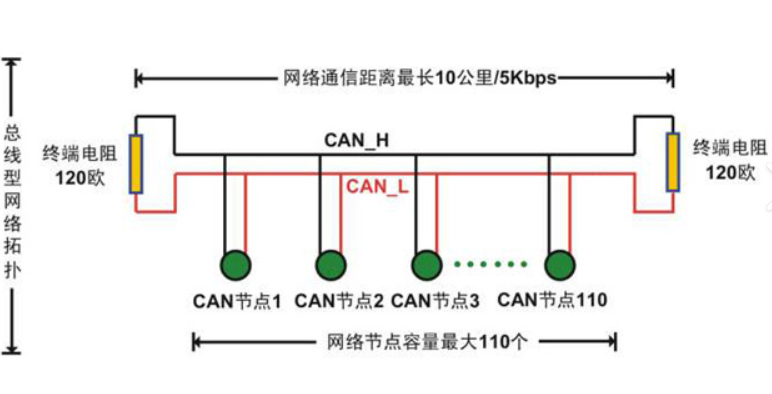
點擊上方 藍字 關注我們 摘要:以FPGA 代替傳統的單片機和外圍擴展芯片, 給出了CAN 總線通信節點的詳細設計方案。其中以SJA1000為CAN 總線控制器、FPGA 為主控制器, 設計實現通信
2023-06-18 11:15:011796 電子發燒友網站提供《基于ARM和CAN總線的電氣信號采集節點的設計.pdf》資料免費下載
2023-10-13 11:31:031 電子發燒友網站提供《基于單片機CAN總線AO智能節點設計.ppt》資料免費下載
2023-10-20 10:02:070 電子發燒友網站提供《基于CAN總線的智能節點設計.pdf》資料免費下載
2023-10-20 14:44:320 電子發燒友網站提供《機載CAN總線節點的模塊化設計與實現.pdf》資料免費下載
2023-10-31 10:15:400 電子發燒友網站提供《基于CAN總線EPB駐車電流采集節點的設計與研究.pdf》資料免費下載
2023-11-08 11:13:220 CAN總線最大能夠帶多少節點?CANFD相對于CAN2.0有哪些差異呢? CAN總線最大能夠帶多少節點? CAN總線是一種廣泛應用于汽車領域的多主機串行通信總線。CAN總線使用CSMA/CR
2024-01-31 14:08:59543 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見的CAN總線類型。它們在數據傳輸速率、最大電纜長度、適用場景等方面存在一些差異。下面將詳盡、詳實、細致地介紹這兩種CAN
2024-01-31 14:09:01497 找到CAN總線(故障)節點的三種辦法? CAN總線是現代汽車電子系統中常見的通信協議,用于車載電子設備之間的數據傳輸。在汽車的CAN總線系統中,每個節點都扮演著重要的角色。然而,由于各種原因,有時候
2024-02-02 10:35:10457 一般來說,大部分CAN總線連接的節點數量在10個到100個之間。
2024-02-19 14:27:57439
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論