各位前輩誰知道MPU6050如何通過USB轉(zhuǎn)接模塊與電腦連接然后讀數(shù)據(jù)啊
2015-04-19 17:00:55
MPU6050與MPU9050的區(qū)別
2015-09-25 20:53:04
單片機(jī)問題總結(jié):MPU6050的DMP模塊初始化放在RTOS線程啟動(dòng)之前文章目錄單片機(jī)問題總結(jié):MPU6050的DMP模塊初始化放在RTOS線程啟動(dòng)之前問題復(fù)現(xiàn)問題總結(jié)問題解決問題復(fù)現(xiàn)
2022-02-10 06:26:39
為什么MPU6050一開始數(shù)據(jù)輸出經(jīng)過校正后是對(duì)的,和單片機(jī)連接后燒程序進(jìn)去兩天了都可以正常工作,但是突然間數(shù)據(jù)輸出就一直不變而且不是正確的加速度,這是為什么呢,我用邏輯分析儀測(cè)試了一下
2019-04-08 11:04:43
2.4 STM32 MPU6050數(shù)據(jù)獲取(IIC + DMP)本篇文章主要針對(duì)廉價(jià)的MPU6050模塊。我們這里完成了MPU6050的數(shù)據(jù)獲取、零偏自動(dòng)設(shè)置、溫漂抑制。這里提供源碼工程文件,供大家
2021-08-09 07:17:09
MPU6050 加速度傳感器模塊
2023-03-28 13:06:19
文章目錄前言一、MPU6050是什么?二、使用步驟1.引入庫2.讀入數(shù)據(jù)總結(jié)前言一、MPU6050是什么?MPU6050是一款性價(jià)比很高的陀螺儀,可以讀取X Y Z 三軸角度,X Y Z 三軸加速度
2022-02-10 07:22:09
不采用DMP,直接用單片機(jī)實(shí)現(xiàn)姿態(tài)解算。如上圖所示,SCL 和 SDA 是連接 MCU 的 IIC 接口,MCU 通過這個(gè) IIC 接口來控制 MPU6050,另外還有一個(gè) IIC 接口:AUX...
2022-02-10 07:46:19
MPU6050簡介什么是MPU6050MPU6050的特點(diǎn)MPU6050框圖MPU6050初始化MPU6050—DMP使用介紹MPU6050—DMP使用DMP驅(qū)動(dòng)庫驅(qū)動(dòng)代碼硬件連接
2022-02-10 07:02:46
外接MPU6050代碼教程一、準(zhǔn)備好原子的教程二、硬件連接(注意AD0的連接3.3V,這樣的話陀螺儀地址就可以變成0x69)三、代碼修改1.2.3.然后直接燒錄程序即可。四、效果顯示1.剛開始一般會(huì)
2022-02-10 07:29:53
的數(shù)據(jù)處理融合。最近調(diào)試了MPU6050與51單片機(jī)和stm32的數(shù)據(jù)傳輸,附件是一些程序,包括測(cè)量加速度角速度,通過串口返回?cái)?shù)據(jù),測(cè)量溫度及角度等源碼。還有stm32單片機(jī)的MPU6050模塊文件(C H文件),希望對(duì)大家有所幫助。
2015-07-19 17:15:40
mpu6050簡介:MPU6000(6050)為全球首例整合性6軸運(yùn)動(dòng)處理組件,相較于多組件方案,免除了組合陀螺儀與加速器時(shí)間軸之差的問題,減少了大量的封裝空間。當(dāng)連接到三軸磁強(qiáng)計(jì)
2022-02-11 07:46:16
一、MPU6050簡介1.什么是MPU6050?MPU6050是InvenSense公司推出的全球首款整合性6軸運(yùn)動(dòng)處理組件,內(nèi)帶3軸陀螺儀和3軸加速度傳感器,并且含有一個(gè)第二IIC接口,可用于連接
2021-08-09 07:25:57
GY-521模塊--MPU6050芯片學(xué)習(xí)(一)一、模塊介紹二、MPU6050MPU6050 的特點(diǎn):MPU6050檢測(cè)軸示意圖MPU6050地址問題一、模塊介紹GY-521模塊實(shí)物:GY-521
2022-02-10 07:19:53
起因:筆者最近的一個(gè)小項(xiàng)目里面需要使用到一塊MPU6050姿態(tài)傳感器。因?yàn)橹霸谀硨氋I過現(xiàn)成的MPU6050調(diào)試過,使用的是一塊STM32F1x系列的單片機(jī)驅(qū)動(dòng),代碼是沒有問題的。所以根據(jù)
2022-02-10 07:30:18
各位大神,我使用mpu6050時(shí)遇到的一個(gè)問題,單獨(dú)的驅(qū)動(dòng)mpu6050時(shí)可以輸出正確的四元數(shù),但是利用讀出的數(shù)據(jù)控制兩組電機(jī)旋轉(zhuǎn)時(shí)輸出的數(shù)據(jù)在幾乎不變;折騰一番發(fā)現(xiàn)只有控制B組電機(jī)旋轉(zhuǎn)時(shí)MPU6050工作才會(huì)異常,但是兩組電機(jī)的控制函數(shù)幾乎一樣啊,實(shí)在弄不懂是哪里出了問題
2017-07-28 12:00:08
有沒有誰知道,用51單片機(jī)是否能處理好MPU6050的角度問題?
2014-12-28 10:11:52
做一款使用mpu6050逇產(chǎn)品,不妙的是 mpu6050的零飄值太大了, 完全駕馭不了現(xiàn)在的算法,沒有大神對(duì)mpu6050零飄值有更加深的見解,處理方式和獨(dú)特的算法
2019-05-14 01:08:30
目錄GY-521MPU6050 介紹陀螺儀加速度計(jì)陀螺儀和加速度計(jì)的關(guān)系,姿態(tài)解算融合的原理硬件從機(jī)地址部分參考STM32—驅(qū)動(dòng)六軸MPU6050輸出歐拉角GY-521MPU6050 介紹關(guān)于
2022-02-10 07:45:15
2.4 STM32MPU6050數(shù)據(jù)獲取(IIC + DMP)本篇文章主要針對(duì)廉價(jià)的MPU6050模塊。我們這里完成了MPU6050的數(shù)據(jù)獲取、零偏自動(dòng)設(shè)置、溫漂抑制。這里提供源碼工程文件,供大家
2022-02-10 06:01:07
STM32解析MPU6050 MPU6050使用說明書V4.pdf 上位機(jī).rar STM32解析MPU6050.zip
2018-07-02 08:04:42
MPU6050芯片數(shù)據(jù)的。想要讀取MPU6050芯片,其實(shí)就是通過IIC去操作讀取寄存器。大致過程就是STM32和MPU6050先建立好IIC通訊。再去初始化MPU6050芯片。然后單片機(jī)再去讀取寄存器,就能把數(shù)據(jù)讀取出來了。2配置32單片機(jī)的IIC引腳根據(jù)你32單片機(jī)的原理圖,找到你的IIC引腳。
2022-02-10 06:47:34
關(guān)于MPU6050前言簡介首先,個(gè)人是通過野火的視頻,有專門介紹MPU6050的版塊來做的了解。然后關(guān)于MPU6050基本認(rèn)識(shí)跟坐標(biāo)系就不做闡述了MPU6050主要是陀螺儀跟加速度計(jì)“:最直觀的角度
2021-08-03 07:37:47
最近在實(shí)驗(yàn)mpu6050,遇到2個(gè)問題。1、在初始化之后,讀取mpu6050的地址時(shí),會(huì)出現(xiàn)地址為0的情況;2、第一次讀取地址為0x68時(shí),讀取數(shù)據(jù)全為0,然后Reset后會(huì)出現(xiàn)一組數(shù)據(jù)。每隔1s
2016-08-09 09:32:59
# MPU6050常見問題的分析與處理本文主要針對(duì)STM32使用MPU6050過程中產(chǎn)生的問題進(jìn)行分析和處理,部分內(nèi)容也適用于其他單片機(jī)。本文基于MPU6050自帶的DMP算法。文章內(nèi)容對(duì)于MPU6050調(diào)試過程有一定的幫助。
2022-02-10 07:23:19
該工程是基于keil4.22編寫的,采用stm32單片機(jī)。使用Mpu6050的dmp功能。獲取的是歐拉角和四元數(shù)。
2013-08-20 15:21:22
基于STM32單片機(jī) MPU6050傳感器做的載人平衡車
2020-06-01 12:28:02
標(biāo)題基于STM32F103C8T6的MPU6050調(diào)試與數(shù)字運(yùn)動(dòng)處理器DMPStrongerHangover丶萌筆者之前也接觸過MPU6050模塊,但是并沒有真正的去了解內(nèi)部的通訊方式與內(nèi)部的寄存器
2021-08-09 08:54:21
如何利用MPU6050返回來的信號(hào),讓單片機(jī)控制車子的平衡
2016-11-07 17:10:00
做一個(gè)手勢(shì)控制的小車用有線將MPU6050連接至單片機(jī)已實(shí)現(xiàn)了對(duì)小車的控制,現(xiàn)在要實(shí)現(xiàn)無線不知道怎么處理了,請(qǐng)問,用藍(lán)牙將MPU6050的數(shù)據(jù)傳送至89C51單片機(jī)如何實(shí)現(xiàn)啊?MPU6050有兩個(gè)線,一個(gè)SCL線,一個(gè)SDA線如何用藍(lán)牙傳輸至單片機(jī) ,代替有線連接呢????求幫助啊!
2014-07-06 22:47:45
請(qǐng)教大神MPU6050,是不是不能直接接單片機(jī)TTL 5V電平
2015-05-18 21:33:52
問下各位大哥,51單片機(jī)能操作MPU6050的DMP嗎?在網(wǎng)上找了一下,發(fā)現(xiàn)大部分都是STM32操作的,另外,關(guān)于MPU6050的DMP實(shí)在不怎么懂,大神能知道下操作MPU6050的思路嗎?目前只能讀出原始數(shù)據(jù),像三軸重力加速度和角速度的原始數(shù)據(jù)。
2019-06-18 04:35:46
高分求一個(gè)飛思卡爾單片機(jī)利用串口通信方式采集MPU6050的程序?
2017-04-06 18:25:51
MPU6050陀螺儀使用( 原理圖代碼 )
2015-10-29 15:24:46 91
91 MPU6050 相關(guān)資料 源程序 原理圖
2015-11-11 11:48:3933 MPU6050資料,有關(guān)MPU6050的介紹。
2015-12-10 18:20:1233 MPU6050程序,想了解、想要的小伙伴趕緊看看哦!
2015-12-15 13:51:5837 基于STM32單片機(jī)+MPU6050傳感器做的載人平衡車
2016-01-20 15:54:09236 mpu6050詳細(xì)源碼,配有電路圖以及初始化C語言程序。詳細(xì)的mpu6050中文資料!
2016-02-18 11:53:2098 MPU6050原理圖,PDF格式,還蠻清晰。
2016-03-24 17:25:37108 MPU6050 用51單片機(jī)串口測(cè)試程序,通過1602顯示數(shù)據(jù)
2016-04-28 14:57:0932 最新MPU6050資料V5,包括上位機(jī),PCB庫,示例程序(PC版,STM32,Arduino版)
2016-06-22 16:28:2826 本程序是基于Mpu6050,所做的四元數(shù)結(jié)算 相當(dāng)穩(wěn),希望對(duì)大家有所幫助
2016-08-17 10:36:5590 四路dmp的mpu6050的STM32F103程序
2017-02-28 21:08:1013 MPU6050(硬件IIC)MPU6050(硬件IIC)
2017-04-02 16:29:3071 InvenSense公司的三軸陀螺儀MPU6050測(cè)試程序。IIC接口,51單片機(jī)驅(qū)動(dòng),LCD1602同步顯示。
2017-11-07 14:01:26 5743
5743 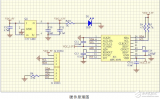
MPU6050模塊,如圖 1所示。該模塊集成了一片MPU6050芯片和一片STM8S003F3P6單片機(jī),具有串口和I2C接口。MPU6050中的DMP(數(shù)字運(yùn)動(dòng)處理器)對(duì)姿態(tài)進(jìn)行融合,STM8
2017-11-07 14:06:4114001 為避免糾纏于電路細(xì)節(jié),我們直接使用集成的MPU6050模塊。MPU6050的數(shù)據(jù)接口用的是I2C總線協(xié)議,因此我們需要Wire程序庫的幫助來實(shí)現(xiàn)Arduino與MPU6050之間的通信。請(qǐng)先確認(rèn)你的Arduino編程環(huán)境中已安裝Wire庫。
2017-11-07 14:25:066954 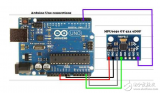
本文主要介紹了mpu6050姿態(tài)解算原理分析及程序設(shè)計(jì),MPU6050硬件DMP解算姿態(tài)是非常簡單的,四元數(shù)法只求解四個(gè)未知量的線性微分方程組,計(jì)算量小,易于操作,是比較實(shí)用的工程方法。
2017-12-11 13:51:3441795 
本文介紹了mpu6050和mpu3050有什么不同和相同。分別介紹了mpu6050和mpu3050基礎(chǔ)以及特點(diǎn),mpu3050是三軸陀螺傳感器,MPU6050內(nèi)部整合了3軸陀螺儀和3軸加速度傳感器。
2017-12-11 15:41:5534848 本文主要介紹了mpu6050對(duì)應(yīng)i2c地址是什么,并通過stm32的硬件讀取mpu6050的數(shù)據(jù)。MPU6050 的 I2C 地址是 0xD0H(11010000B)。I2C從器件有8位的地址,前7位由 WHO AM I確定,第8位由AD0的電平?jīng)Q定。
2017-12-11 16:04:1623368 
本文開始介紹了mpu6500的定義與MPU6500驅(qū)動(dòng)總結(jié),其次闡述了mpu6050的定義與mpu6050感測(cè)范圍,最后介紹了mpu6500和mpu6050的區(qū)別。
2018-03-08 09:54:0289691 本文開始對(duì)mpu9150進(jìn)行了介紹,其次介紹了mpu6050的定義、mpu6050感測(cè)范圍以及mpu6050的特征,最后闡述了mpu9150和mpu6050區(qū)別。
2018-03-08 10:07:1141146 本文開始闡述了卡爾曼濾波的概念,其次闡述了卡爾曼濾波的性質(zhì)與卡爾曼濾波的應(yīng)用,最后介紹了mpu6050卡爾曼濾波分析及mpu6050卡爾曼濾波輸出姿態(tài)角程序。
2018-03-09 08:57:3171467 
mpu6050常用作提供飛控運(yùn)行時(shí)的姿態(tài)測(cè)量和計(jì)算。本文首先介紹了MPU6050姿態(tài)解算的原理,其次詳細(xì)的介紹了mpu6050姿態(tài)解算程序。
2018-03-09 09:15:2441957 MPU6050使用說明書下載
2018-04-14 11:41:2217 mpu6050與單片機(jī)串口連接通訊實(shí)驗(yàn)資料下載
2018-04-23 09:11:1015 本文檔的主要內(nèi)容詳細(xì)介紹的是使用51單片機(jī)實(shí)現(xiàn)MPU6050的卡爾曼濾波算法代碼免費(fèi)下載 。
2019-08-20 17:31:0059 本文檔的主要內(nèi)容詳細(xì)介紹的是使用51單片機(jī)讀取MPU6050然后通過串口發(fā)送的程序免費(fèi)下載。
2019-06-13 17:45:0039 本文檔的主要內(nèi)容詳細(xì)介紹的是串口MPU6050卡爾曼濾波6軸9軸資料合集免費(fèi)下載包括了:MPU-6050寄存器映射,MPU-6000和MPU-6050產(chǎn)品規(guī)范,串口MPU6050封裝庫,串口MPU6050原理庫,MiniIMU上位機(jī)軟件,論壇資料,指令校準(zhǔn)法。
2019-05-20 08:00:0040 InvenSense 公司的三軸陀螺儀MPU6050 測(cè)試程序。IIC 接口, 51 單片機(jī)驅(qū)動(dòng), LCD1602 同步顯示。
2019-07-19 17:48:4236 本文檔的主要內(nèi)容詳細(xì)介紹的是使用MSP430單片機(jī)應(yīng)用MPU6050陀螺儀的程序免費(fèi)下載。
2019-07-24 16:03:0070 本文檔的主要內(nèi)容詳細(xì)介紹的是如何使用STM32單片機(jī)的硬件I2C讀取MPU6050的數(shù)據(jù)資料和程序免費(fèi)下載。
2019-07-25 17:31:500 在進(jìn)入項(xiàng)目之前,您需要了解MPU6050傳感器的一些基礎(chǔ)知識(shí)。 MPU-6050是一種IMU傳感器,在單個(gè)芯片上包含MEMS(微機(jī)電系統(tǒng))加速度計(jì)和MEMS陀螺儀。
2019-07-29 08:56:0136565 本文檔的主要內(nèi)容詳細(xì)介紹的是使用STM32單片機(jī)讀取MPU6050傳感器數(shù)據(jù)的程序免費(fèi)下載。
2019-07-26 17:35:1159 最近接觸MPU6050 ,下面對(duì)6050 初始化配置做一點(diǎn)總結(jié),如有錯(cuò)誤還望不吝賜教在初始化MPU6050 前,先確定單片機(jī)與MPU6050 通信是否正常, 根據(jù)手冊(cè)MPU6050 采用的是400kbit/s 的IIC。
2019-08-01 16:55:3588 本文檔的主要內(nèi)容詳細(xì)介紹的是使用AVR單片機(jī)的I2C讀取MPU6050的數(shù)據(jù)發(fā)送到串口的程序免費(fèi)下載。
2019-08-06 16:39:009 本文檔的主要內(nèi)容詳細(xì)介紹的是MPU6050與單片機(jī)通訊的C語言源碼免費(fèi)下載。
2019-09-09 17:15:2434 本文檔的主要內(nèi)容詳細(xì)介紹的是51單片機(jī)的MPU6050模塊數(shù)據(jù)讀取及LCD1602顯示的程序免費(fèi)下載。
2020-01-17 16:44:2385 MPU6050專用穩(wěn)壓模塊的原理圖設(shè)計(jì)
2021-11-07 19:21:0037 MPU6050開發(fā) -- 數(shù)據(jù)分析
2021-11-30 11:21:0422 MPU6050簡介什么是MPU6050MPU6050的特點(diǎn)MPU6050框圖MPU6050初始化MPU6050—DMP使用介紹MPU6050—DMP使用DMP驅(qū)動(dòng)庫驅(qū)動(dòng)代碼硬件連接
2021-12-06 11:51:1167 1、首先把正點(diǎn)原子MPU6050例程文件夾下 HARDWARE/MPU6050 這個(gè)文件夾整個(gè)拷貝到我們的工程文件夾里面。2、把里面所有的.c文件都加入我們的工程里面,記得添加頭文件路徑3、進(jìn)入
2021-12-06 11:51:1115 MPU6050斷電保持原角度心得 基于正點(diǎn)原子mpu6050例程所改寫 首先要更改兩點(diǎn) 第一點(diǎn):inv_mpu.c中改寫第2885行,如圖第二點(diǎn):inv_mpu.c中改寫第2978行,如圖改寫
2021-12-06 11:51:1116 移植正點(diǎn)原子mpu6050代碼,總是MPU6050初始化失敗解決首先觀察正點(diǎn)原子MPU6050代碼,發(fā)現(xiàn)它在讀取MPU6050數(shù)據(jù)的同時(shí),還將數(shù)據(jù)通過串口發(fā)送給上位機(jī)進(jìn)行調(diào)試,而我們移植
2021-12-06 11:51:1238 # MPU6050常見問題的分析與處理本文主要針對(duì)STM32使用MPU6050過程中產(chǎn)生的問題進(jìn)行分析和處理,部分內(nèi)容也適用于其他單片機(jī)。本文基于MPU6050自帶的DMP算法。文章內(nèi)容對(duì)于MPU6050調(diào)試過程有一定的幫助。
2021-12-06 12:21:0641 文章目錄引言簡述一下mpu6050和stm32的一些坑吧MPU6050 I2C讀寫MPU6050 初始化讀取內(nèi)部溫度傳感器讀取陀螺儀DMP的移植讀取三軸角度引言最近玩了IMU模塊,看了很多的博客
2021-12-06 12:36:0714 前言MPU6050具備中斷寄存器,有助于精準(zhǔn)獲取數(shù)據(jù)。本文將使用STM32配置FIFO中斷,并控制中斷時(shí)間。如果對(duì)于MPU6050還存在其他問題可參考另一篇文章。MPU6050常見問題的分析與處理
2021-12-06 12:36:0714 文章目錄1 簡介2 MPU60503 工作原理4 單片機(jī)與MPU6050通信4.1 mpu6050 數(shù)據(jù)格式4.2 傾角計(jì)算方法5 實(shí)現(xiàn)代碼6 最后1 簡介Hi,大家好,這里是丹成學(xué)長,今天向大家
2021-12-06 12:51:1013 STM32獲取MPU6050數(shù)據(jù)
2021-12-06 13:06:1648 MPU6050姿態(tài)融合解算(DMP)
2021-12-06 13:21:1037 關(guān)于MPU6050學(xué)習(xí)的一些總結(jié)之二IIC協(xié)議前言一、IIC總線前言在查閱并了解了MPU6050的芯片手冊(cè)后,已經(jīng)對(duì)MPU6050有了大致的了解。那么接下來如何使MPU6050工作并且讀取內(nèi)部寄存器
2021-12-06 13:21:112 其他參數(shù)仍然無法優(yōu)化達(dá)到自穩(wěn)。想來單片機(jī)都可以做到很高的頻率,其他前輩都能用樹莓派做飛控,沒理由我的樹莓派運(yùn)行效率這么慢。? 對(duì)比了別人的MPU6050代碼,我使用的是wiringpi這個(gè)庫的i2c...
2021-12-06 14:06:071 單片機(jī)問題總結(jié):MPU6050的DMP模塊初始化放在RTOS線程啟動(dòng)之前文章目錄單片機(jī)問題總結(jié):MPU6050的DMP模塊初始化放在RTOS線程啟動(dòng)之前問題復(fù)現(xiàn)問題總結(jié)問題解決問題復(fù)現(xiàn)
2021-12-06 14:06:0810 MPU6050芯片數(shù)據(jù)的。想要讀取MPU6050芯片,其實(shí)就是通過IIC去操作讀取寄存器。大致過程就是STM32和MPU6050先建立好IIC通訊。再去初始化MPU6050芯片。然后單片機(jī)再去讀取寄存器,就能把數(shù)據(jù)讀取出來了。2 配置32單片機(jī)的IIC引腳根據(jù)你32單片機(jī)的原理圖,找到
2021-12-06 14:06:0812 地址MPU6050電氣原理圖1、I2C總線I2C(Inter-integrated Circuit)總線是由PHILIPS公司開發(fā)的兩線式串行總線,用于連接微控制器及其外圍設(shè)備,是微電子通信控制領(lǐng)域...
2021-12-06 14:06:0825 STM32 MPU6050 平衡車
2021-12-06 14:51:1061 MPU6050( )
2021-12-06 15:06:1123 mpu6050的移植普通io口移植 :1.寄存器配置更改注意:a…超過7 CRL --> CRH 然后重新計(jì)數(shù)76543210–>15 14 13 12 11
2021-12-06 15:51:084 MPU6050數(shù)據(jù)手冊(cè),規(guī)格說明
2022-03-09 15:03:5492 電子發(fā)燒友網(wǎng)站提供《使用MPU6050平衡LED項(xiàng)目.zip》資料免費(fèi)下載
2023-02-08 15:34:055 電子發(fā)燒友網(wǎng)站提供《MPU6050教程開源分享.zip》資料免費(fèi)下載
2023-06-25 15:18:146 MPU6050和MPU6500都是InvenSense公司生產(chǎn)的高性能六軸陀螺儀和加速度計(jì)傳感器。它們被廣泛應(yīng)用于各種領(lǐng)域,如移動(dòng)設(shè)備、虛擬現(xiàn)實(shí)、機(jī)器人、汽車等。雖然它們之間有一些區(qū)別,但是無法簡單
2023-12-21 16:54:001769
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論