在8位單片機(jī)中沒(méi)有16位數(shù)的操作指令,所有的int型數(shù)據(jù)都要通過(guò)兩個(gè)字節(jié)分開(kāi)操作,使用的方法不用,生成的代碼
2017-09-27 15:21:45 8735
8735 做軟件包加固測(cè)試最重要的是要熟悉Linux的操作指令與shell腳本語(yǔ)言。因?yàn)檐浖窃跉W拉服務(wù)器上運(yùn)行,需要通過(guò)Linux指令來(lái)部署相關(guān)環(huán)境并且執(zhí)行軟件包功能。
2022-07-01 11:22:46985 S7-200 SMART CPU收集操作指令、現(xiàn)場(chǎng)狀況等信息,把這些信息按照用戶程序指定的規(guī)律進(jìn)行運(yùn)算、處理,然后輸出控制、顯示等信號(hào)。
2023-06-14 15:28:399763 
2MC-16LXCPU 內(nèi)核指令集還增加了用于高級(jí)語(yǔ)言的指令,支持?jǐn)U展尋址模式并包括增強(qiáng)型乘法和除法指令以及大量經(jīng)過(guò)改進(jìn)的位操作指令。此外 MB90460 還包括一個(gè) 32 位累加器,可用于長(zhǎng)字?jǐn)?shù)據(jù)處理。集成在
2021-04-19 06:57:58
轉(zhuǎn)移指令17條位操作指令或布爾操作此文章分別討論5大類(lèi)系統(tǒng)指令的助記符、含義、用法等屬性。數(shù)據(jù)傳送指令MOV助記符:MOV英文全稱(chēng):Move含義:對(duì)內(nèi)部數(shù)據(jù)寄存...
2021-11-18 06:09:30
什么是位操作?位操作指令有哪幾種呢?有何作用?
2022-02-25 07:07:28
位及位操作指令通過(guò)前面那些流水燈的例子,我們已經(jīng)習(xí)慣了“位”一位就是一盞燈的亮和滅,而我們學(xué)的指令卻全都是用“字節(jié)”來(lái)介紹的:字節(jié)的移動(dòng)、加法、減法、邏輯運(yùn)算、移位等等。用字節(jié)來(lái)處理一些數(shù)學(xué)
2011-04-13 09:34:46
'14,2K'14,4K'15和8K'16位 · 數(shù)據(jù)的RAM大小64'8,96'8選擇,160'8和224'8位 · 停止功能和喚醒功能來(lái)減少功耗 · 63條指令 · 位操作指令 有HT48R70單片機(jī)解密等需求者歡迎與我們聯(lián)系咨詢更多合作詳情http://www.dpjjm.com。
2012-09-27 11:59:38
本文介紹西門(mén)子s7-200 plc的置位與復(fù)位,這兩個(gè)位操作的指令在我們的程序編寫(xiě)中,作用也是很大,它能完成一些,常規(guī)常開(kāi)常閉觸點(diǎn)編程無(wú)法完成的程序,可以使我們編寫(xiě)的PLC程序條理更加清晰,步驟
2020-12-22 16:10:08
課:控制轉(zhuǎn)移類(lèi)指令、半導(dǎo)體存儲(chǔ)器、條件轉(zhuǎn)移指令、單片機(jī)的內(nèi)外部結(jié)構(gòu)(二)、位及位操作指令、計(jì)數(shù)器與定時(shí)器、定時(shí)計(jì)數(shù)器控制字、中斷系統(tǒng)、尋址方式與指令系統(tǒng)、堆棧操作、算術(shù)運(yùn)算類(lèi)指令 。專(zhuān)業(yè)級(jí)人士寫(xiě)的書(shū),值得初學(xué)者查看:?jiǎn)纹瑱C(jī)經(jīng)典入門(mén)教程`
2011-04-02 22:48:52
熟,等我們講解相關(guān)內(nèi)容時(shí)再作詳細(xì)解釋。位操作指令MCS-51單片機(jī)的硬件結(jié)構(gòu)中,有一個(gè)位處理器(又稱(chēng)布爾處理器),它有一套位變量處理的指令集。在進(jìn)行位處理時(shí),CY(就是我們前面講的進(jìn)位位)稱(chēng)“位累加器
2018-06-15 10:59:33
可以用指令CLR指令來(lái)關(guān)閉定時(shí)/計(jì)數(shù)器的工作嗎。TMOD的字節(jié)地址不是89H嗎,不可以被位尋址的啊,怎么可以用位操作指令來(lái)操作呢
2011-07-07 14:41:09
;nbsp;采用邏輯運(yùn)算實(shí)現(xiàn)位操作,C程序簡(jiǎn)單明了,移植性好,可讀性更好。但96系列單片機(jī)無(wú)法利用JBC和JBS位操作指令,51系列單片機(jī)也無(wú)法利用JB和JNB等其特有的位操作指令來(lái)提高代碼效率。用位段
2008-10-02 13:24:45
SAM88RCRI 指令集支持寄存器卷操作,它可完成8 位算術(shù)操作和邏輯操作,共有41條指令集。由于采用了存貯器影射方式,所以沒(méi)有具體的I/O 口操作指令。指令支持位操作,循環(huán)、移
2008-11-27 11:06:51 33
33 一、指令系統(tǒng)簡(jiǎn)介T(mén)MS320C24x系列DSP偽指令極為豐富,安裝指令可以分為六大類(lèi):1. Accumulator(累加器指令), arithmetic(算術(shù)指令), and logic instructions(邏輯操作指令)等2. Auxil
2010-03-03 22:37:32136
布爾處理功能是MCS-51系列單片機(jī)的一個(gè)重要特征,這是出于實(shí)際應(yīng)用需要而設(shè)置的。布爾變量也即開(kāi)關(guān)變量,它是以位(bit)為
2006-04-03 22:45:341322 51匯編偽指令
偽指令是對(duì)匯編起某種控制作用的特殊命令,其格式與通常的操作指令一樣,
2008-08-01 10:59:022722 邏輯操作指令
邏輯操作類(lèi)指令共有效25條,有與、或、異或、求反、左右移位、清0等邏輯操作,對(duì)應(yīng)的尋址方式有直接、寄存器和間接尋址,該類(lèi)指令的執(zhí)行一般不影響PSW。
2009-03-14 15:34:251664 單片機(jī)教程十四:單片機(jī)位操作指令
前面那些流水燈的例程,我們已經(jīng)習(xí)慣了“位”一位就是一盞燈的亮和滅,而我們學(xué)的指令卻全都是用“字節(jié)”
2009-05-15 23:09:181466 天語(yǔ)手機(jī)工程操作指令大全
中文語(yǔ)言:*#0086# + send
設(shè)置指令:*#66*#
查看版本:*#8375#
2009-12-28 08:13:032123 單片機(jī)入門(mén)教程第15課-單片機(jī)指令(八)
位及位操作指令通過(guò)前面那些流水燈的例子,我們已經(jīng)習(xí)慣了“位”一位就是一盞燈的亮和滅,而我
2010-01-07 16:01:02850 登錄交換機(jī) 敲空格鍵,回車(chē) 出現(xiàn)以下提示,輸入用戶名(一般8個(gè)字符),回車(chē) PLEASE ENTER USERID 接著出現(xiàn)以下提示,輸入密碼,回車(chē) PLEASE ENTER CURRENT PASSWORD(AND OPTIONALLY A NEW ONE SEPERATED BY BLANK)
2011-03-08 11:56:520 據(jù)外媒最新報(bào)道,三星已經(jīng)確認(rèn)將于2013年發(fā)布首款Tizen開(kāi)源系統(tǒng)設(shè)備,該系統(tǒng)把智能手機(jī)與桌面系統(tǒng)進(jìn)行聯(lián)通,并提供豐富的操作指令。
2013-01-04 17:52:21761 2014-06-04 10:56:460 指令
3.6 程序控制指令
3.7 處理機(jī)控制指令
3.8 串操作指令
3.9 條件字節(jié)設(shè)置指令
2015-12-31 10:39:510 TM1640O為專(zhuān)用的數(shù)碼管顯示IC.串口操作,指令少,操作簡(jiǎn)單,最高速度達(dá)到1MPBS.
2016-02-25 15:33:01156 控制系統(tǒng)流程圖是一種較新的編程方法。它是用像控制系統(tǒng)流程圖一樣的功能圖表達(dá)一個(gè)控制過(guò)程,目前國(guó)際電工協(xié)會(huì)(IEC)正在實(shí)施發(fā)展這種新式的編程標(biāo)準(zhǔn)。
2016-08-01 15:59:083823 PLC編程語(yǔ)言_操作指令_使用步驟詳解,感興趣的小伙伴們可以瞧一瞧。
2022-05-12 10:36:390 6.5 ADD加操作指令 1.指令的編碼格式 ADD加操作指令,將寄存器《shifter_operand》的值加上《Rn》表示的數(shù)值,并將結(jié)果保存到目標(biāo)寄存器《Rd》中,并根據(jù)指令的執(zhí)行結(jié)果設(shè)置
2017-10-18 13:04:081 ADC帶進(jìn)位的加法指令 1.指令的編碼格式 ADC加操作指令,將寄存器《shifter_operand》的值加上《Rn》表示的數(shù)值,再加上CPSR中的C條件標(biāo)志位的值,將結(jié)果保存到目標(biāo)寄存器《Rd
2017-10-18 13:16:372 6.13 ORR邏輯或指令 1.指令的編碼格式 ORR(Logical OR)為邏輯或操作指令,將第二個(gè)源操作數(shù)《shifter_operand》的值與寄存器Rn的值按位做邏輯或操作,結(jié)果保存到Rd
2017-10-18 14:48:092 1.指令的編碼格式 RSB(Reverse Subtract)減操作指令,從寄存器《shifter_operand》中減去《Rn》表示的數(shù)值,并將結(jié)果保存到目標(biāo)寄存器《Rd》中,并根據(jù)指令的執(zhí)行結(jié)果
2017-10-18 15:35:222 6.7 SBC帶進(jìn)位的減法指令 1.指令的編碼格式 SBC(Subtract with Carry)帶進(jìn)位的減操作指令,用于執(zhí)行操作數(shù)大于32位時(shí)的減法操作。該指令從寄存器《Rn》中減去
2017-10-18 15:35:292 6.8 RSC帶進(jìn)位的翻轉(zhuǎn)減指令 1.指令的編碼格式 RSC(Reverse Subtract with Carry)帶進(jìn)位的翻轉(zhuǎn)減操作指令,從寄存器《shifter_operand》中減去《Rn
2017-10-18 15:35:262 6.3 SUB減操作指令 1.指令的編碼格式 SUB(Subtract)減操作指令,從寄存器《Rn》中減去《shifter_operand》表示的數(shù)值,并將結(jié)果保存到目標(biāo)寄存器《Rd》中,并根據(jù)指令
2017-10-18 15:35:321 1.指令編碼格式 UMLAL(Unsigned Multiply Accumulate Long)為64位無(wú)符號(hào)長(zhǎng)乘-累加指令。指令將Rm和Rs中的值做無(wú)符號(hào)數(shù)相乘,64位乘積與RdHi,RdLo
2017-10-19 10:22:591 7.5 SMULL無(wú)符號(hào)長(zhǎng)乘-累加操作指令 1.指令編碼格式 SMULL(Signed Multiply Long)64位有符號(hào)長(zhǎng)乘法指令。指令將Rm和Rs中的值做有符號(hào)數(shù)相乘,結(jié)果的低32位保存
2017-10-19 10:25:281 1.指令編碼格式 SMLAL(Signed Multiply Accumulate Long)為64位有符號(hào)長(zhǎng)乘法指令。指令將Rm和Rs中的值做有符號(hào)數(shù)相乘,64位乘積與RdHi,RdLo相加,結(jié)果
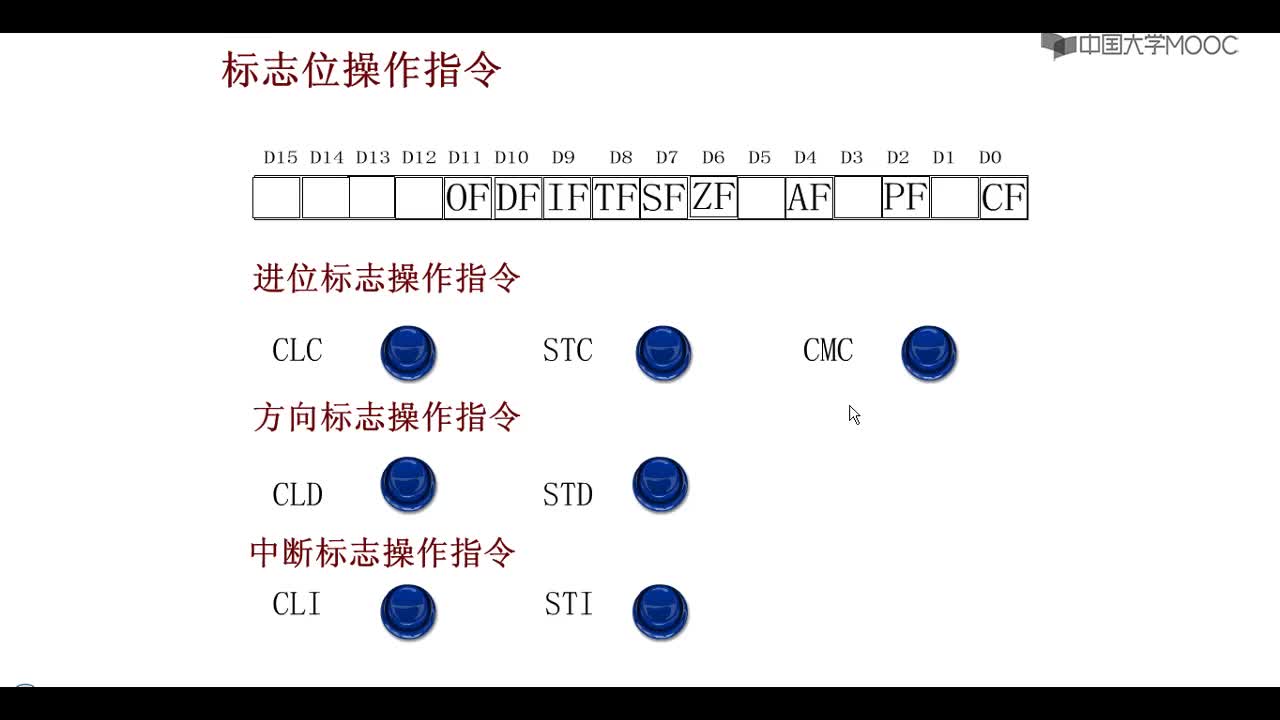
2017-10-19 10:23:531 MCS-51單片機(jī)有豐富的位操作指令,可以把大量的硬件組合邏輯用軟件來(lái)代替,這樣可以方便地應(yīng)用于各種邏輯控制,主要用于控制線路通、斷,繼電器的吸合與釋放等。位操作指令如表所示。
2017-11-16 10:58:4713514 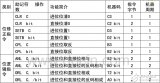
PLC即可編程邏輯控制器。可編程邏輯控制器是種專(zhuān)門(mén)為在工業(yè)環(huán)境下應(yīng)用而設(shè)計(jì)的數(shù)字運(yùn)算操作電子系統(tǒng)。它采用一種可編程的存儲(chǔ)器,在其內(nèi)部存儲(chǔ)執(zhí)行邏輯運(yùn)算、順序控制、定時(shí)、計(jì)數(shù)和算術(shù)運(yùn)算等操作的指令,通過(guò)數(shù)字式或模擬式的輸入輸出來(lái)控制各種類(lèi)型的機(jī)械設(shè)備或生產(chǎn)過(guò)程。labview實(shí)現(xiàn)plc指令
2017-11-20 15:02:4136884 前面那些流水燈的例程,我們已經(jīng)習(xí)慣了位一位就是一盞燈的亮和滅,而我們學(xué)的指令卻全都是用字節(jié)來(lái)介紹的:字節(jié)的移動(dòng)、加法、減法、邏輯運(yùn)算、移位等等。用字節(jié)來(lái)處理一些數(shù)學(xué)問(wèn)題,比如說(shuō):控制冰箱的溫度、電視
2017-11-22 12:17:56218 一、常用對(duì)象操作:除了一般windows窗口的常用功能鍵外。
1、!dir 可以查看當(dāng)前工作目錄的文件。 !dir& 可以在dos狀態(tài)下查看。
2、who 可以查看當(dāng)前工作空間變量名, whos 可以查看變量名細(xì)節(jié)。
2018-02-08 09:41:376191 指令周期是取出一條指令并執(zhí)行這條指令的時(shí)間。一般由若干個(gè)機(jī)器周期組成,是從取指令、分析指令到執(zhí)行完所需的全部時(shí)間。指令周期類(lèi)型有非訪內(nèi)指令的指令周期、取數(shù)指令的指令周期、存數(shù)指令的指令周期、空操作指令和轉(zhuǎn)移指令的指令周期。
2022-03-09 13:46:3635906 
1.數(shù)據(jù)傳送指令匯總 2.算術(shù)運(yùn)算類(lèi)指令匯總 3.控制轉(zhuǎn)移類(lèi)指令匯總 4.邏輯運(yùn)算指令匯總 5.布爾(位)操作指令匯總
2018-03-20 10:53:002367 
是西門(mén)子s7200 PLC的,啟動(dòng),保持,停止的控制電路和程序,我們知道右邊的這個(gè)程序,它是用單純的常開(kāi)和常閉的位操作指令編寫(xiě)的,可以完成自鎖的功能。大家不太明白的再看一下上一節(jié)。但除了以上介紹的,這個(gè)自鎖功能還能用我們今天講的置位和復(fù)位操作來(lái)完成。
2018-04-09 17:04:5997802 
指令(instruction):告訴計(jì)算機(jī)從事某一特殊運(yùn)算的代碼,如數(shù)據(jù)傳送指令、算術(shù)運(yùn)算指令、位運(yùn)算指令、程序流程控制指令、串操作指令、處理器控制指令。一條指令通常由兩部分組成:操作碼和地址碼。
2018-06-01 10:58:536091 
本文介紹西門(mén)子s7-200 plc的置位與復(fù)位,這兩個(gè)位操作的指令在我們的程序編寫(xiě)中,作用也是很大,它能完成一些,常規(guī)常開(kāi)常閉觸點(diǎn)編程無(wú)法完成的程序,可以使我們編寫(xiě)的PLC程序條理更加清晰,步驟更加簡(jiǎn)單。
2018-07-24 15:03:4710806 
本文檔的主要內(nèi)容詳細(xì)介紹的是MCS-51單片機(jī)如何操作?MCS-51單片機(jī)的指令系統(tǒng)詳細(xì)資料概述,指令和指令程序,尋址方式,數(shù)據(jù)傳送指令,算術(shù)運(yùn)算指令,邏輯運(yùn)算及移位指令,控制轉(zhuǎn)移指令, 布爾變量操作指令(位操作)
2018-08-30 08:00:0021 BOX(Enterprise Token Safe Box)是一個(gè)企業(yè)級(jí)數(shù)字資產(chǎn)保險(xiǎn)柜應(yīng)用,它利用區(qū)塊鏈、密碼學(xué)、通信安全等領(lǐng)域的公理性技術(shù)對(duì)各類(lèi)數(shù)字資產(chǎn)的私鑰、操作指令進(jìn)行保護(hù),從原理上解決了私鑰、指令的盜取、篡改等問(wèn)題。
2018-09-05 11:54:592691 CPU將CS:IP指向的內(nèi)存單元中的內(nèi)容看作指令,因?yàn)椋谌魏螘r(shí)候,CPU將CS,IP中的內(nèi)容當(dāng)作指令的段地址和偏移地址,用它們合成指令的物理地址,到內(nèi)存中讀取指令碼,執(zhí)行。
2018-09-24 17:52:009386 ------------------------------------------
二、減法
SUBB A,------------------------------------
三、加1(不影響標(biāo)志位)
INC A(Rn、@Ri,direct,DPTR)
對(duì)端口Pi的“讀--修改---寫(xiě)”指令:INC、DEC、ANL、ORL、XOR、DJNZ
2019-02-11 10:00:001169 本文檔的詳細(xì)介紹的是單片機(jī)教程之51系列單片機(jī)的指令系統(tǒng)資料免費(fèi)下載主要內(nèi)容包括了:1.尋址方式,2.數(shù)據(jù)傳送與交換指令,3.算術(shù)運(yùn)算、邏輯運(yùn)算指令,4.控制轉(zhuǎn)移指令,5.位操作指令
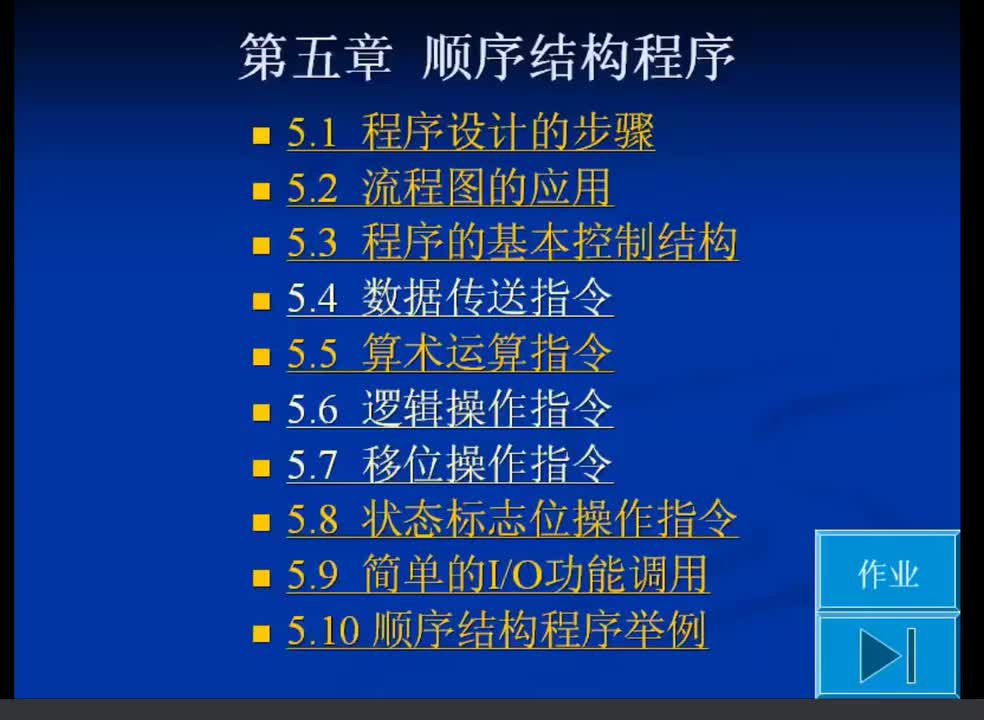
2019-02-15 15:59:249 MCS-51單片機(jī)指令系統(tǒng)按功能可分為5類(lèi):
(1)數(shù)據(jù)傳送指令
(2)算術(shù)運(yùn)算指令
(3)邏輯運(yùn)算和移位指令
(4)控制轉(zhuǎn)移指令
(5)位操作指令
2019-03-20 14:31:105310 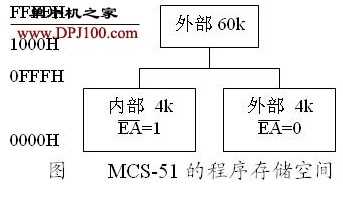
第一條指令稱(chēng)之為推入,就是將direct中的內(nèi)容送入堆棧中,第二條指令稱(chēng)之為彈出,就是將堆棧中的內(nèi)容送回到direct中。推入指令的執(zhí)行過(guò)程是,首先將SP中的值加1,然后把SP中的值當(dāng)作地址,將direct中的值送進(jìn)以SP中的值為地址的RAM單元中。
2019-04-04 14:38:048667 本文檔的主要內(nèi)容詳細(xì)介紹的是51單片機(jī)的匯編指令詳細(xì)資料講解包括了:數(shù)據(jù)傳遞類(lèi)指令,以累加器為目的操作數(shù)的指令,以寄存器Rn為目的操作的指令,以直接地址為目的操作數(shù)的指令,以間接地址為目的操作
2019-09-16 17:22:001 本文檔的主要內(nèi)容詳細(xì)介紹的是51單片機(jī)的數(shù)據(jù)傳遞類(lèi)和控制轉(zhuǎn)移類(lèi)指令的詳細(xì)資料說(shuō)明包括了:以累加器為目的操作數(shù)的指令,以寄存器Rn為目的操作的指令,以直接地址為目的操作數(shù)的指令,間接地址為目的操作數(shù)的指令,十六位數(shù)的傳遞指令,累加器A與片外RAM之間的數(shù)據(jù)傳遞類(lèi)指令,程序存儲(chǔ)器向累加器A傳送指令等等
2019-09-11 17:25:002 一個(gè)單片機(jī)邏輯電路題目,要求編一程序?qū)崿F(xiàn)下面邏輯電路的邏緝功能。
2019-06-26 17:43:000 前面那些流水燈的例程,我們已經(jīng)習(xí)慣了“位”一位就是一盞燈的亮和滅,而我們學(xué)的指令卻全都是用“字節(jié)”來(lái)介紹的:字節(jié)的移動(dòng)、加法、減法、邏輯運(yùn)算、移位等等。用字節(jié)來(lái)處理一些數(shù)學(xué)問(wèn)題,比如說(shuō):控制
2019-06-04 16:25:061 在8位單片機(jī)中沒(méi)有16位數(shù)的操作指令,所有的int型數(shù)據(jù)都要通過(guò)兩個(gè)字節(jié)分開(kāi)操作,使用的方法不用,生成的代碼也不相同,當(dāng)然效率也不一樣,通過(guò)指針對(duì)16位數(shù)進(jìn)行操作可以得到高效的代碼。
2019-06-30 10:29:236737 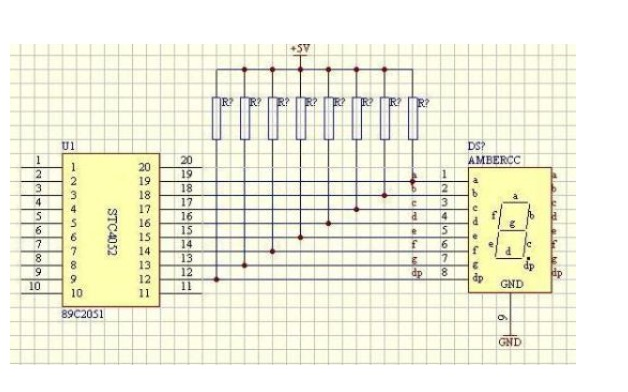
接受處理遙控器、面板按鍵發(fā)出的操作指令,這些指定即包括用戶操作指定,又包括維修所需指令,例如定頻運(yùn)行(加氟運(yùn)行)、自我檢測(cè)、故障自診。
2019-07-04 16:50:322715 對(duì)消防聯(lián)動(dòng)控制器實(shí)施操作時(shí),可通過(guò)顯示操作單元,輸入操作指令,顯示操作單元對(duì)輸入的操作指令進(jìn)行編譯,并將確認(rèn)有效的指令信息,傳送給主控單元,由主控單元進(jìn)行分析和處理,并向各功能單元發(fā)出相關(guān)的任務(wù)操作指令,完成人員對(duì)系統(tǒng)的信息查詢和操作的執(zhí)行。
2019-09-07 11:12:4421162 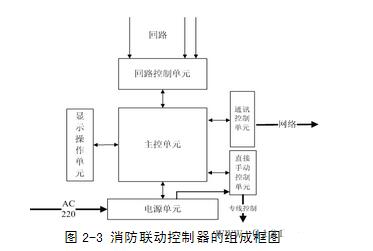
DR-435T和DR-435E大功率車(chē)載電臺(tái)操作指令手冊(cè)免費(fèi)下載。
2019-11-11 08:00:000 調(diào)度操作指令要由有權(quán)發(fā)布指令的調(diào)度值班員(所屬調(diào)度單位發(fā)文公布)發(fā)布;操作人和監(jiān)護(hù)人必須由上級(jí)部門(mén)批準(zhǔn)并公布的合格人員擔(dān)任。
2019-12-04 10:10:4315228 窄帶物聯(lián)網(wǎng)(Narrow Band Internet of Things, NB-IoT)成為萬(wàn)物互聯(lián)網(wǎng)絡(luò)的一個(gè)重要分支。NB-IoT構(gòu)建于蜂窩網(wǎng)絡(luò),只消耗大約180KHz的帶寬,可直接部署于GSM網(wǎng)絡(luò)、UMTS網(wǎng)絡(luò)或LTE網(wǎng)絡(luò),以降低部署成本、實(shí)現(xiàn)平滑升級(jí)。
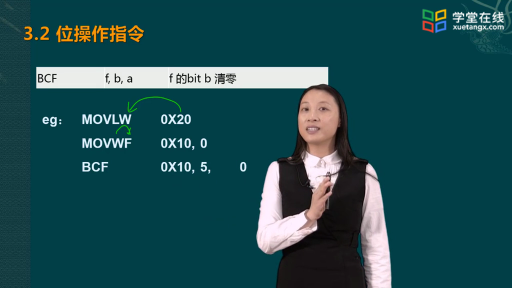
2020-05-03 09:26:009285 在匯編語(yǔ)言中有直接對(duì)位進(jìn)行操作的指令,如置位、復(fù)位、位取反、測(cè)試某一位等,這對(duì)于硬件操作十分方便,在C語(yǔ)言中盡管也提供了一些位操作手段,如按位與、按位或、按位取反等,但它們是對(duì)一個(gè)字節(jié)進(jìn)行操作,如要對(duì)具體的一位操作,仍舊不方便,以下給出了一些函數(shù),可以模仿匯編語(yǔ)言的一些位操作功能。
2020-05-05 15:40:001964 采用終端計(jì)算機(jī)進(jìn)行遠(yuǎn)程操作,從實(shí)際用途上實(shí)現(xiàn)人機(jī)分離,設(shè)備通過(guò)遠(yuǎn)程操作指令即可進(jìn)行安全運(yùn)作事宜。
2020-06-01 09:22:001251 控制器通過(guò)UART方式控制模組時(shí)自動(dòng)激活和手動(dòng)激活PDN都可選擇,帶Linux、Andriod的控制器通過(guò)USB進(jìn)行撥號(hào)上網(wǎng)時(shí)需要設(shè)置成手動(dòng)激活PDN。
2020-06-04 14:57:5910441 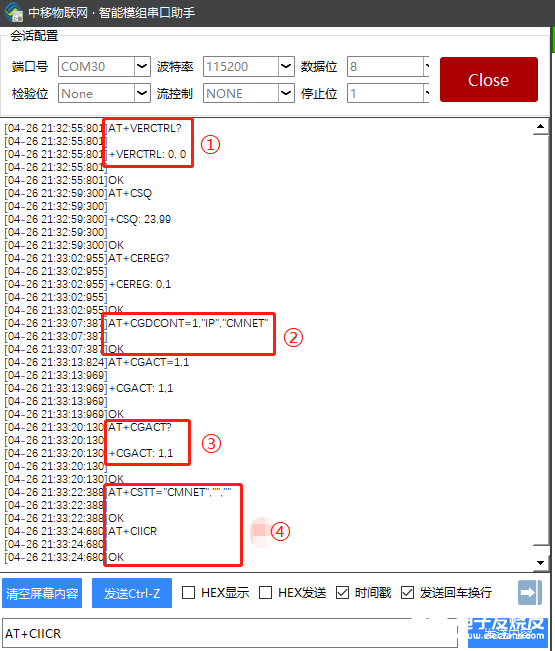
操作系統(tǒng)中硬件相關(guān)的部分集中體現(xiàn)在匯編指令和對(duì)寄存器的操作中,因此我們對(duì)ARM體系結(jié)構(gòu)的介紹也圍繞ARMv8-A的匯編指令和寄存器來(lái)展開(kāi)。
2020-06-18 15:49:273401 在匯編語(yǔ)言中有直接對(duì)位進(jìn)行操作的指令,如置位、復(fù)位、位取反、測(cè)試某一位等,這對(duì)于硬件操作十分方便,在C語(yǔ)言中盡管也提供了一些位操作手段,如按位與、按位或、按位取反等,但它們是對(duì)一個(gè)字節(jié)進(jìn)行操作,如要對(duì)具體的一位操作,仍舊不方便,以下給出了一些函數(shù),可以模仿匯編語(yǔ)言的一些位操作功能。
2020-07-18 12:00:462871 條 控制轉(zhuǎn)移指令17條 位操作指令或布爾操作此文章分別討論5大類(lèi)系統(tǒng)指令的助記符、含義、用法等屬性。數(shù)據(jù)傳送指令MOV助記符:MOV英文全稱(chēng):Move含義:對(duì)內(nèi)部數(shù)據(jù)寄存...
2021-11-11 15:06:038 文章目錄前言一、簡(jiǎn)單操作指令 CLR、CPL、SWAPCLR ACPL ASWAP A二、位移指令 RL、RR、RLC、RRCRL ARR ARLC ARRC A三、邏輯“與”指令 ANLANL
2021-11-12 09:06:03450 3.4.3 乘法3.4.4 除法3.4.5 十進(jìn)制調(diào)整指令3.5 邏輯操作指令3.6 控制轉(zhuǎn)移指令3.7 位操作指令3.8 偽指令51單片機(jī)指令系統(tǒng)3.1 指令系統(tǒng)基礎(chǔ)機(jī)器語(yǔ)言-匯編-高級(jí)語(yǔ)言全部指令的集合叫指令系統(tǒng)80C51有111條指令,還有8條偽指令指令分類(lèi):字節(jié)數(shù)分類(lèi)單字節(jié)49 雙字節(jié)46
2021-11-23 16:19:142 8051指令系統(tǒng)指令系統(tǒng)概述指令指令格式指令系統(tǒng)的尋址方式8051常見(jiàn)指令數(shù)據(jù)傳送指令算術(shù)運(yùn)算指令邏輯操作指令控制跳轉(zhuǎn)指令位操作指令如何改變文本的樣式插入鏈接與圖片如何插入一段漂亮的代碼片生成
2021-11-23 16:21:147 、R3 為 I2C 上拉電阻,ADDR 是 I2C 通訊時(shí)設(shè)備地址的選擇,即接電源或接地時(shí),讀操作、寫(xiě)操作的指令有所區(qū)別,如下圖。一般為接地,即寫(xiě)操作指令為0x46,讀操作指令為0x47。2.B...
2021-12-05 19:36:0527 與母線連接,也不能象指令表中的OR、ORI、ORP、ORF指令那樣單獨(dú)使用。 2、NOP(空操作指令) 是一條空操作指令,用于程序的修改。它不執(zhí)行操作,但占一個(gè)程序步。 NOP可以理解為程序表中預(yù)留的“空檔”,執(zhí)行NOP時(shí)并不做任何事,有時(shí)可用NOP指令短接某些觸點(diǎn)或用NOP指令將不要的指
2021-12-17 14:14:544024 文章目錄前言一、特性和引腳分布1.參考數(shù)據(jù)2.結(jié)構(gòu)框圖3.引腳及其功能二、SPI指令及寄存器地址1.SPI指令2.寄存器地址3.定義數(shù)據(jù)發(fā)送和接收寬度三、基本的用戶自定義函數(shù)四、硬件部分1.原理圖
2021-12-17 18:05:3610 這篇博客的內(nèi)容是指令系統(tǒng)的另一部分,上部分請(qǐng)看上篇博客。單片機(jī)指令系統(tǒng)(1)目錄?三、邏輯操作類(lèi)指令1 邏輯“與”指令2 邏輯“或”指令3 邏輯“異或”指令4 循環(huán)移位指令5 取反指令6 清0指令
2021-12-17 18:34:161 ?? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?位操作指令位操作類(lèi)指令位操作又稱(chēng)為布爾操作,是以位為單位進(jìn)行的各種操作。在布爾處理機(jī)中,借用進(jìn)位
2022-01-13 13:54:283 1)數(shù)據(jù)傳送類(lèi)指令(7種助記符);(2)算術(shù)運(yùn)算類(lèi)指令(8種助記符);(3)邏輯運(yùn)算類(lèi)指令(10種助記符);(4)控制轉(zhuǎn)移類(lèi)指令(17種助記符);(5)位操作指令(1種助記符)
2022-02-10 11:36:220 對(duì)于如圖3中的指令,這些是用于硬流控操作的指令,通過(guò)信號(hào)設(shè)置激活相關(guān)的接收發(fā)送。除非使用硬流控,否則不需要使用,具體使用可以參見(jiàn)TIA PORTAL幫助或者S7-1200系統(tǒng)手冊(cè)。
2022-07-21 10:48:173437 Git 的工作就是創(chuàng)建和保存你項(xiàng)目的快照及與之后的快照進(jìn)行對(duì)比。
2023-02-10 11:32:31519 在S7-1200PLC中,可以使用交換指令SWAP進(jìn)行數(shù)據(jù)位置的交換;具體就是改變輸入操作數(shù)IN端數(shù)據(jù)的字節(jié)的排列順序,然后在OUT端進(jìn)行輸出交換后的結(jié)果
2023-03-29 13:36:237795 對(duì)于給定的圖像I,任務(wù)目標(biāo)是定位圖像I中的一個(gè)子區(qū)域,該子區(qū)域?qū)?yīng)操作指令中的語(yǔ)義信息。對(duì)于操作指令,首先對(duì)其每個(gè)單詞進(jìn)行編碼轉(zhuǎn)成獨(dú)熱向量,然后利用循環(huán)神經(jīng)網(wǎng)絡(luò)提取其編碼后的文本特征。
2023-04-18 09:58:56809 vim編輯器的完整操作命令
在Linux下,可以鍵入vimtutor命令,有一個(gè)包含實(shí)操的vim教程。
1.VI的三種命令模式
1)Command(命令)模式,用于輸入命令
2023-04-28 16:25:150 上位機(jī)與下位機(jī)1.1 上位機(jī)與下位機(jī)的概念上位機(jī)和下位機(jī),一般是指集中控制系統(tǒng)中的PC機(jī)和現(xiàn)場(chǎng)的工控機(jī)。上
位機(jī)(PC機(jī))主要用來(lái)發(fā)出操作指令和顯示結(jié)果數(shù)據(jù),下位機(jī)(工控機(jī))則主要用來(lái)監(jiān)測(cè)和執(zhí)行
2023-05-08 10:41:180 雙手操作按鈕盒需要配合專(zhuān)用控制器(雙手同步控制器)才能工作。如果使用故障安全型PLC,可以通過(guò)雙手操作指令來(lái)完成類(lèi)似的功能。今天這篇文章,我們就來(lái)介紹下博途環(huán)境下基于故障安全的雙手操作指令——TWO_H_EN。本文包括兩個(gè)主題:
2023-05-18 09:10:47642 
在切割/沖壓等機(jī)械加工領(lǐng)域,有時(shí)候需要操作人員手動(dòng)上料。手動(dòng)上料過(guò)程中設(shè)備應(yīng)處于停止?fàn)顟B(tài),當(dāng)上料完畢并確認(rèn)安全后,才能再次啟動(dòng)。
2023-05-18 09:10:07727 
讓我們先來(lái)了解一些基本的問(wèn)題。Arm 在 Arm?v8.2-A 架構(gòu)中引入了大型系統(tǒng)擴(kuò)展(Large System Extensions, LSE),它用單個(gè)原子指令取代了鎖操作的指令序列
2023-06-07 17:35:46501 
在S7-1200PLC中,可以通過(guò)該指令對(duì)一個(gè)數(shù)組中的任意元素的值進(jìn)行讀取或是寫(xiě)入操作;該指令位于“移動(dòng)指令”,“原有”文件夾下面的FieldRead和FieldWriteFieldWrite;
2023-07-12 14:11:471103 
PLC為可編程控制器,它采用可編程存儲(chǔ)器存儲(chǔ),執(zhí)行運(yùn)算、順序控制、定時(shí)計(jì)數(shù)等操作指令
2023-11-03 16:58:30594 
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論