 電子發燒友App
電子發燒友App


采用WinCE的液位遙測系統軟件設計
針對目前海事應用中液位遙測系統的現狀,基于ARM9芯片的WinCE嵌入式開發平臺,開發一套智能的液位遙測系統。該系統采用CAN總線,遵循CANopen協議,在EVC開發環境下結合多線程技術和數據庫技術實現遙測系統的通信和界面顯示功能。實驗結果表明,該系統穩定、實時、生動地實現了通信、顯示、存儲、打印等功能,具有很高的應用價值。
關鍵詞? 液位遙測? WinCE? CAN總線? CANopen? ARM9
引言
液位遙測系統是油輪和化學品船的核心部分[1],直接關系到船舶在海上航行的安全性和可靠性。目前國內該行業還處于低技術的惡性競爭,要改變這種狀況,只有通過提升技術水平才能實現。本系統就是在此背景下進行研究設計的。
該系統是以ARM9為內核,在WinCE操作系統平臺下,以CAN通信為基礎,CANopen協議為規范,綜合應用EVC編程、CAN通信、數據庫、多線程等技術設計的一個智能液位遙測系統。
ARM9的工作頻率最高為200 MHz,微處理器內置彩色圖像處理電路,因此可以直接外接TFTLCD/VGA顯示屏。
CAN(Controller Area Network)總線是一種多主從結構,具有報文仲裁,錯誤自檢測、處理機制,較強的通信能力,較強的短路保護能力,通信方式靈活多樣等優點。船舶液位遙測系統是一個局域網控制系統,選用CAN總線更能滿足其傳輸的高可靠性[2]。
1? CANopen協議
CANopen最初由從事工業控制的CiA會員開發,由于CANopen是一種公共、開放、通用的協議,而且精練透明、容易開發,如今已經被接受為CAN高層協議的標準之一。[3]

圖1? CANopen設備模塊
一個CANopen設備模塊可分為3部分,如圖1所示。通信接口和協議軟件用于提供在總線上收發通信對象的服務;不同CANopen設備間的通信都是通過交換通信對象來完成的, 這一部分直接面向CAN控制器進行操作。對象字典描述了設備使用的所有數據類型、通信對象和應用對象;對象字典位于通信程序和應用程序之間,用于向應用程序提供接口。應用程序對對象字典進行操作,即可實現CANopen通信。它包括功能部分和通信部分,通信部分通過對對象字典進行操作實現CANopen通信;而功能部分則根據應用要求來實現。
在CANopen網絡系統中每個節點都有唯一的一個對象字典,而且每個節點的對象字典都具有相同的結構;但具體的內容要根據不同的設備而定,包含了描述該設備及其網絡行為的所有參數。CANopen協議還定義了4種報文(通信對象),用于對不同作用的信息進行處理,分別為管理報文(NMT)、服務數據對象(SDO)、過程數據對象(PDO)和預定義報文或特殊功能對象。
2? 液位遙測系統總體結構
液位遙測系統主要實現2項功能:
①??對各艙的液位、溫度、壓力等進行實時監測;
②? 當監測高于報警值時發出報警信號。
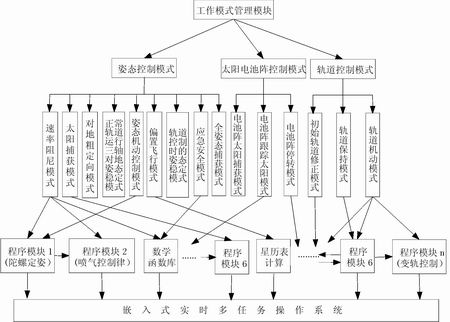
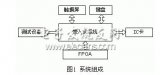
針對這2項功能,采用了CAN總線的網絡拓撲結構,系統總體結構框圖如圖2所示。

圖2? 液位遙測系統總體結構
由圖2可知,整個系統以CAN總線進行通信,然而CAN芯片只提供了開放系統互連參考模型(OSI)中的物理層和鏈路層功能,一般用戶必須直接用驅動程序操作鏈路層。不能直接滿足控制網絡的組態和產品互連要求。為了以CAN芯片為基礎構成完整的工業控制現場總線系統,必須制定相應的應用層協議,實現系統的組態、設備互連和兼容功能。下面分別介紹各部分的功能。
2.1? 分布式處理單元DPU
DPU是采用模塊化設計、具有通信功能的智能化遠程I/O單元。DPU單元分布在船艙各處,作為傳感器和執行器的接口,直接與傳感器和執行器相連。各個DPU單元可以用兩根普通的雙芯屏蔽電纜( 或雙絞線等)連接到CAN總線上,將定時采集的各船艙液位高度、溫度等各種實時數據發送到總線上。
目前,基于CANopen的DPU的各種模塊(模擬量輸入/輸出、數字量輸入/輸出等)可以根據具體的監測點連接到網絡中,完成液位、溫度、壓力等的監測。

圖3? 上位監測點結構圖
2.2? 上位監測點
在本系統中,上位監測點主要實現通信和應用兩個方面功能,具體結構如圖3所示。
ARM9的開發平臺已將CAN驅動嵌入,根據CAN2.0協議,可以直接完成物理層和數據鏈路層的通信,因此,在WinCE操作系統下,實現CANopen通信,解析通信對象,調用應用程序,完成整個上位系統的CANopen通信。
3? CANopen通信的實現
3.1? CAN通信
CAN通信通過調用底層封裝的接口函數實現,主要包含:
開端口CAN_StartChip;
關端口CAN_StartChip;
接收CAN數據CAN_GetNextReceivedFrame;;
發送CAN數據CAN_SendFrame。
具體通信流程如圖4所示。

圖4? CAN通信流程
3.2? CANopen通信
CANopen協議是CAN通信應用層的協議。通信標準定義了不同的通信對象,這些通信對象通過標識符(COB_ID)來進行區分。
網絡管理報文(NMT):提供網絡管理服務,例如初始化、錯誤控制和設備狀態控制。NMT對象映射到一個單一的帶2字節數據長度的CAN幀,它的標識符為0。在本系統中主要用于系統啟動的初始化。
過程數據對象(PDO):過程數據對象用來傳遞實時數據,數據傳輸被限制在1~8字節,每個PDO有一個唯一的標識符。標識符具有優先級,遙測系統主要是對實時的液位等信息進行顯示,大量的PDO數據進行實時傳送。
服務數據對象(SDO):SDO的傳送是有證實的服務,可靠性比較高,主要用于對系統中各節點的配置或信息的設置。
以上4種對象都有不同的優先級。對于接收到的報文根據其COB_ID進行解析,分送各不同的應用變量,即可實現CANopen通信。
4? 應用模塊實現
4.1? 系統配置
本系統中采用了配置文件的形式增強配置的靈活性,配置文件是根據下位DPU中各模塊、通道的現場分布匯總成的txt文件。首先,利用移動磁盤或者Remote File Viewer在PC機上載入配置文件。其次是讀取工作,通過函數GetProfileString,根據不同的字段獲取需要的內容。最后,對所獲得內容賦給相應的變量,并進行顯示更新。
具體配置形式如圖5所示。由圖可知,可以對系統中模塊的使用、艙名、信號類型、單位、范圍、報警上下限、報警延時等進行設置。因此,在集控室就可完成基本的配制,大大減輕了工作人員的負擔。

圖5? 系統配置
4.2? 實時顯示
為了實現實時、準確、生動地顯示系統運行狀況,在該模塊中利用了文本加圖形的方式。因為數據量較大,界面類型較多,切換頻繁,故主要采用了動態創建控件的解決方法。
液位遙測系統主要完成各艙液位的實時顯示。此外,還包括貨艙的溫度、壓力,以及管路管道的壓力等重要信息。
4.3??數據存儲
在本系統中,數據存儲主要完成的是對報警數據的存儲和對艙容信息的監測,利用的是WinCE自帶數據庫系統。
系統存儲的主要是報警數據,因此數據量比較小,采用自帶數據庫可以很方便地實現所需功能。此外,EVC4.0沒有提供訪問外部數據庫ADOCE的接口。
4.4? 實時打印
在本系統中實現了實時打印,即只要出現報警信息,立即將該信息進行打印輸出;當故障排除后,重新進行打印,以便對數據進行保存分析。
5? 結論
本文所研究的是基于CANopen協議,在ARM9的WinCE嵌入式開發平臺上的船舶液位遙測系統軟件。CANopen作為CAN總線的應用層協議,在船舶遙測系統中有著廣闊的應用前景。
系統中CAN總線的應用大大提高了系統總體傳輸速率,雙CAN機制更加增強了整個系統的容錯能力,保證了船舶運行的安全性。整個軟件系統實現了CANopen通信,完成了數據顯示、存儲、打印、報警,并使配置更智能,實驗證明了其運行的可靠性。












 工商網監
工商網監
評論