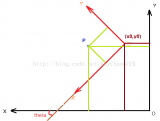
工業(yè)現(xiàn)場相機(jī)坐標(biāo)系和機(jī)械手坐標(biāo)系的標(biāo)定
其中r是毫米像素比、(mm/pixel)就是一個(gè)毫米有幾個(gè)像素,theta為兩個(gè)坐標(biāo)系之間的夾角,(....
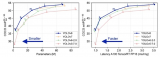
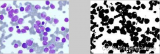
用自己的數(shù)據(jù)集訓(xùn)練YOLOv8實(shí)例分割模型
YOLOv8 于 2023 年 1 月 10 日推出。截至目前,這是計(jì)算機(jī)視覺領(lǐng)域分類、檢測和分割任....
基于過Python+matplotlib數(shù)據(jù)可視化路徑規(guī)劃算法實(shí)現(xiàn)
Astar潛在地搜索圖中一個(gè)很大的區(qū)域。和Dijkstra一樣,Astar能用于搜索最短路徑。和BF....

深度學(xué)習(xí)算法和傳統(tǒng)機(jī)器視覺助力工業(yè)外觀檢測
在很多人眼里,深度學(xué)習(xí)是一個(gè)非常神奇的技術(shù),是人工智能的未來,是機(jī)器學(xué)習(xí)的圣杯。今天深視創(chuàng)新帶您一起....
CMU、MIT、清華聯(lián)合發(fā)布全球首個(gè)生成式機(jī)器人智能體RoboGen
CMU、MIT、清華聯(lián)合發(fā)布了全球首個(gè)生成式機(jī)器人智能體RoboGen,可以無限生成數(shù)據(jù),讓機(jī)器人7....
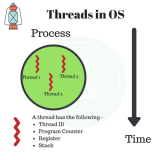
關(guān)于Python多進(jìn)程和多線程詳解
進(jìn)程(process)和線程(thread)是操作系統(tǒng)的基本概念,但是它們比較抽象,不容易掌握。關(guān)于....
點(diǎn)云濾波與匹配進(jìn)階干貨收藏
之前作者專門為點(diǎn)云匹配寫了幾篇博客,但是我們發(fā)現(xiàn)最近幾年有更多的新方法已經(jīng)在不斷地被使用。
同....
ROS機(jī)器人導(dǎo)航調(diào)參手冊
在 ROS 中,我們可以輸出帶有時(shí)間戳的里程計(jì)數(shù)據(jù),然后看機(jī)器人達(dá)到恒定的最大平移速度(ti)需要多....

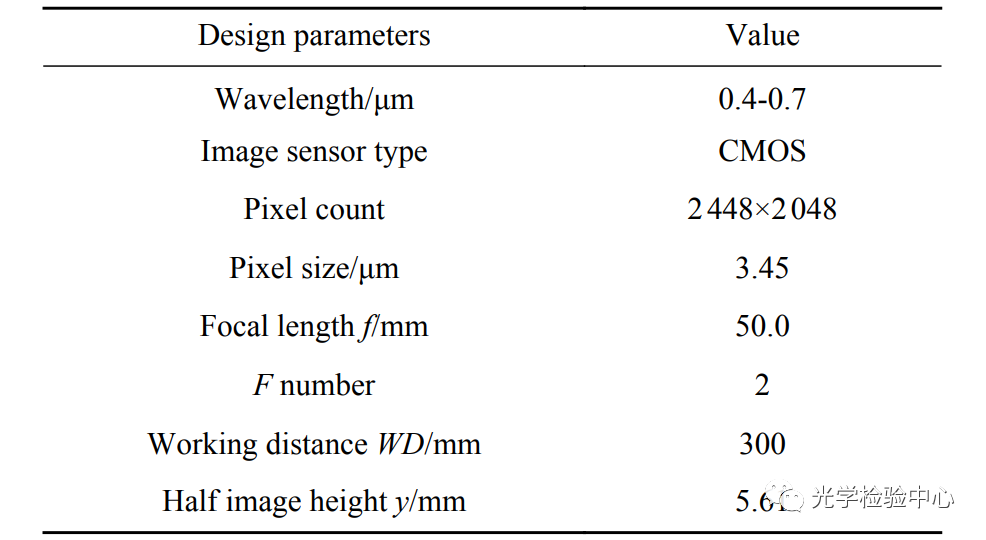
一種基于高反射抑制效應(yīng)的偏振檢測系統(tǒng)設(shè)計(jì)
針對激光增材制造高反射金屬工件表面缺陷的高精穩(wěn)健檢測與評(píng)估這一工程難題,國防科技大學(xué)智能科學(xué)學(xué)院石峰....
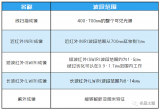
紅外熱成像儀的基礎(chǔ)知識(shí)
紅外熱成像儀通過利用紅外熱成像技術(shù)能夠幫助消防員在災(zāi)害現(xiàn)場進(jìn)行偵察、搜救及滅火工作,無論是火災(zāi)事故還....
什么是雜散光?軟件如何幫助尋找雜散光?
在成像系統(tǒng)中,當(dāng)來自圖像場中的光源的光經(jīng)歷兩次或更多不需要的反射,然后落在成像設(shè)備上,產(chǎn)生不需要的鬼....

什么是算力?算力如何衡量?
簡而言之就是設(shè)備的計(jì)算能力(Computing Power)。小至手機(jī)、PC,大到超級(jí)計(jì)算機(jī),支撐各....
微軟:VSCode決定放棄Python 3.7
Python 3.7 的受歡迎程度還相當(dāng)巨大。根據(jù)三方數(shù)據(jù)統(tǒng)計(jì),在使用 Python 3.X 的網(wǎng)站....

OpenCV初學(xué)者如何提取這些不規(guī)則的ROI區(qū)域
ROI是英文Region Of Interest的三個(gè)首字母縮寫,很多時(shí)候我們對圖像的分析就是對圖像....
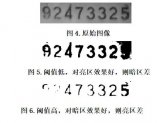
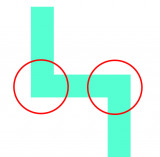
可以提取圖像文本的5大Python庫
光學(xué)字符識(shí)別是一個(gè)古老但依然具有挑戰(zhàn)性的問題,涉及從非結(jié)構(gòu)化數(shù)據(jù)中(包括圖像和PDF文檔)檢測和識(shí)別....

PyTorch與TensorFlow的優(yōu)點(diǎn)和缺點(diǎn)
轉(zhuǎn)載自:冷凍工廠 ? 深度學(xué)習(xí)框架是簡化人工神經(jīng)網(wǎng)絡(luò) (ANN) 開發(fā)的重要工具,并且其發(fā)展非常迅速....

數(shù)字圖像處理基本知識(shí)
數(shù)字圖像,又稱為數(shù)碼圖像或數(shù)位圖像,是二維圖像用有限數(shù)字?jǐn)?shù)值像素的表示。數(shù)字圖像是由模擬圖像數(shù)字化得....

OpenCV基礎(chǔ)知識(shí)入門
OpenCV是計(jì)算機(jī)視覺中最受歡迎的庫,最初由intel使用C和C ++進(jìn)行開發(fā)的,現(xiàn)在也可以在py....

ROS系統(tǒng)讀取USB相機(jī)圖像數(shù)據(jù)
現(xiàn)在市面上最常見的還是USB攝像頭,物美價(jià)廉,要想使USB攝像頭在ROS下正常工作,我們就需要一個(gè)軟....

深度學(xué)習(xí)在工業(yè)缺陷檢測中的應(yīng)用
工業(yè)制造領(lǐng)域中,產(chǎn)品質(zhì)量的保證是至關(guān)重要的任務(wù)之一。然而,人工的檢測方法不僅費(fèi)時(shí)費(fèi)力,而且容易受到主....

機(jī)器視學(xué)習(xí)筆記:圖像配準(zhǔn)
待配準(zhǔn)圖像與原圖像相比存在偏移、旋轉(zhuǎn)、比例等空間變換關(guān)系,圖像配準(zhǔn)就是將不同傳感器所采集得到的同一場....
機(jī)器視覺學(xué)習(xí)筆記:圖像特征提取
區(qū)域和輪廓只包含對分割結(jié)果的原始描述,在實(shí)際應(yīng)用中我們還需要從區(qū)域或輪廓中確定一個(gè)或多個(gè)特征量。這些....
飛秒激光器在醫(yī)學(xué)上的應(yīng)用
飛秒激光器是僅以千兆分之一秒左右的超短時(shí)間放光的“超短脈沖光”發(fā)生裝置。飛是國際單位制詞頭飛托(fe....


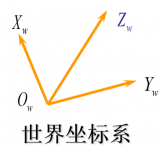
機(jī)器視覺學(xué)習(xí)筆記:攝像機(jī)標(biāo)定技術(shù)
空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對應(yīng)點(diǎn)之間的相互關(guān)系是由攝像機(jī)成像的幾何模型決定的,這些幾....





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)