") 激光定位原理是什么
激光定位原理是什么
對(duì)激光定位的原理作了初步的了解,主流的是三角定位和三邊定位,其中三角定位原理類似GPS ;但是對(duì)于激光定位而言,更多適用于室內(nèi),并且要在環(huán)境中布置安裝一定數(shù)量反射板,同時(shí)需要注意反射板安裝的精度,相隔距離,安裝時(shí)避開窗戶, 非對(duì)稱布置等要素;定位分為初始的靜態(tài)定位和運(yùn)動(dòng)過(guò)程中的動(dòng)態(tài)定位,靜態(tài)定位用于確定初始位置,動(dòng)態(tài)定位則根據(jù)運(yùn)動(dòng)狀態(tài)不斷更新 。
在激光器掃描一周的過(guò)程中,理論上可以計(jì)算得到激光器距離所有反光板的距離,同時(shí)根據(jù)感測(cè)時(shí)間和掃面周期,利用三角公式可以計(jì)算得到任意兩塊反光板之間的距離,將測(cè)量得到的距離與離線理論值進(jìn)行比較從而匹配每個(gè)反光板的編號(hào)與位置信息。
對(duì)于掃描一周過(guò)程中因障礙物等因素為檢測(cè)到的反光板,則在考慮數(shù)量的基礎(chǔ)上對(duì)匹配方法進(jìn)行一定的修正,也能匹配得到反光板信心,最終計(jì)算得到激光器所處位置。
動(dòng)態(tài)過(guò)程相對(duì)于靜態(tài)掃描可以省去較為復(fù)雜的計(jì)算和匹配過(guò)程在位置估計(jì)定時(shí)T時(shí)間內(nèi),通過(guò)轉(zhuǎn)向和速度、加速度等信息可以估計(jì)出位置,同時(shí)考慮到各種干擾,該位置必然存在誤差;用估計(jì)處的位置,計(jì)算出理論的反光板距離得到期望列表,同時(shí)可以通過(guò)設(shè)置反光板估算距離閾值范圍的方式加速匹配。
-
激光器
+關(guān)注
關(guān)注
17文章
2539瀏覽量
60582 -
激光定位
+關(guān)注
關(guān)注
0文章
7瀏覽量
8614
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
激光錫焊視覺(jué)定位技術(shù)的應(yīng)用場(chǎng)景

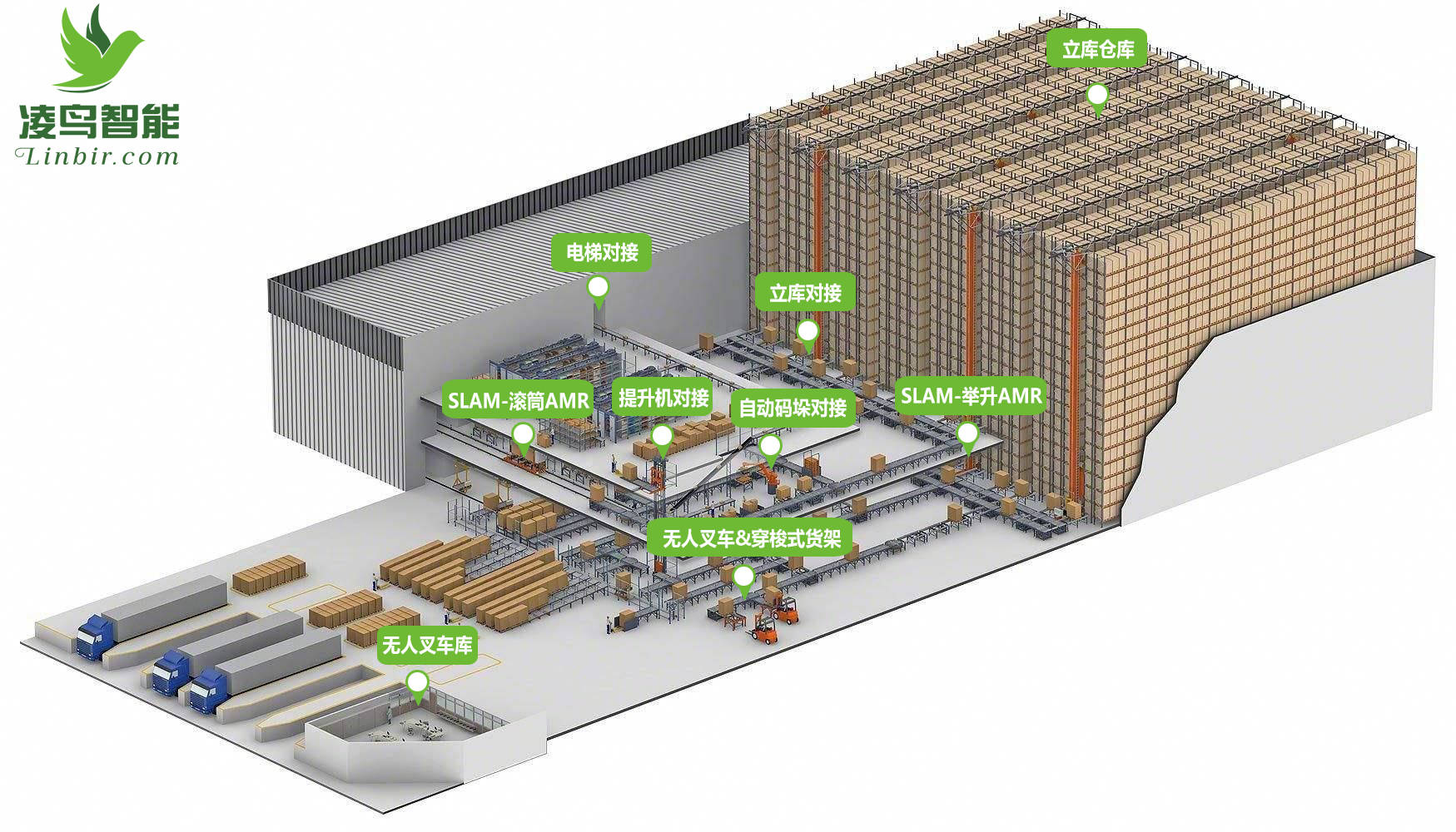
AGV激光導(dǎo)航定位技術(shù)綜述與發(fā)展趨勢(shì)

AGV激光導(dǎo)航定位技術(shù)與構(gòu)建地圖

AGV讀卡器在AGV自動(dòng)搬運(yùn)小車上應(yīng)用方案

激光焊接工藝有哪些?
激光微納制造技術(shù)

視覺(jué)系統(tǒng)輔助引導(dǎo)在激光導(dǎo)航AGV中應(yīng)用
激光焊接視覺(jué)定位引導(dǎo)方法
在電子工業(yè)應(yīng)用中,激光自動(dòng)焊接電子元器件需要注意什么

使用視覺(jué)激光打標(biāo)機(jī)有哪些優(yōu)勢(shì)

激光打標(biāo)機(jī):精準(zhǔn)定位,實(shí)現(xiàn)個(gè)性化標(biāo)識(shí)需求

基于濾波器的激光SLAM方案

淺談激光器基礎(chǔ)知識(shí)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論