") 為什么是使用減速機而不是直接控制電機轉(zhuǎn)速來控制機器人關(guān)節(jié)運動?
為什么是使用減速機而不是直接控制電機轉(zhuǎn)速來控制機器人關(guān)節(jié)運動?
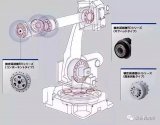
從上面的機器人臂部結(jié)構(gòu)圖中我們可以看到,在機器人關(guān)節(jié)處都安裝有電機和減速機用來控制關(guān)節(jié)運動,那么問題來了:
在機器人系統(tǒng)中,為什么不能直接控制伺服電機轉(zhuǎn)子轉(zhuǎn)速控制關(guān)節(jié)運動,為何還需要減速器?
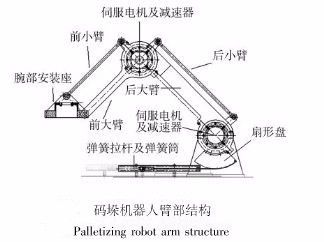
要回答這個問題,首先要明確工業(yè)機器人關(guān)節(jié)的工況:
1.工業(yè)機器人的關(guān)節(jié)需要撐住后端機構(gòu)由于重力產(chǎn)生的扭矩。
2.工業(yè)機器人關(guān)節(jié)轉(zhuǎn)速不高。機器人關(guān)節(jié)角速度很低,可電機在極低的速度下轉(zhuǎn)動是不平穩(wěn)的,控制不易,需要一個機械讓電機在較合理的轉(zhuǎn)速下運動,保證運動的平順。
那么使用減速機的原因有兩點,第一點是提扭矩,第二點就是提控制分辨率和閉環(huán)精度。
例如,一個50:1的諧波減速機就能輕松將一個額定100mNm的電機的額定扭矩提升到5Nm,代價是:
1.轉(zhuǎn)子轉(zhuǎn)速比直驅(qū)高49倍
本來工業(yè)機器人的關(guān)節(jié)轉(zhuǎn)速就不高,一般都是每秒一兩轉(zhuǎn),額定100mNm的電機輕松跑6k轉(zhuǎn)/min,白不轉(zhuǎn)那么快。要是嫌轉(zhuǎn)的不夠快?解決辦法就是提電壓,但這要考慮的是軸承和轉(zhuǎn)子是否撐得住。
2.重量提高到原來3倍
舉個例子,maxon EC45最厚的電機額定轉(zhuǎn)矩為83mNm,重110g;maxon EC90的額定轉(zhuǎn)矩為560mNm,重600g。從這個兩個數(shù)據(jù)出發(fā),可以腦補一下額定5Nm的電機重量是多少倍。
3.維持相同扭矩時,發(fā)熱功率是不加減速機的1/2500
其實不是說額定100mNm的電機干不到5Nm,也是可以做到的,只要往死里提電流就好了,但這樣將會造成電機快速發(fā)燙,撐不了幾秒就得冒煙,就算上了水冷電費也會比較多。要想達到相同扭矩又不想太燙就得換扭矩/發(fā)熱效率高且熱阻小、熱容量大的電機,但這樣就又回到2所說的問題了。
此外,使用減速機的好處有:
1.以更低價格的機械實現(xiàn)更高的分辨率
一個普通5k線的光電碼盤就能實現(xiàn)1.44mdeg的角度分辨率(當(dāng)然,如果資金太多上正余弦編碼器使勁細分也可以實現(xiàn)的);或者是一個5相1000步的步進電機可以做到7.2mdeg的分辨率(此處說的就是東方電機的33步進+50:1的諧波)。
分辨率高的好處是轉(zhuǎn)速控制可以更精確,由于量化造成的階躍產(chǎn)生的高頻分量變得很小,控制更加平滑。
2.提高閉環(huán)精度,更好的控制控制環(huán)路
由于有個50:1的大減速比,減速機出軸受到擾動傳遞到電機端就比直驅(qū)縮減了37dB,使得閉環(huán)精度在減速機出軸顯得更高。同時轉(zhuǎn)子等效的轉(zhuǎn)動慣量提高到了2500倍,使得控制環(huán)路的滯后環(huán)節(jié)受轉(zhuǎn)子慣量占主導(dǎo),而轉(zhuǎn)子由于直接受電磁力的驅(qū)動從而沒有由于剛度造成的扭矩滯后,比直驅(qū)要好控。
除了上面技術(shù)性方面的解答,這里還有一個案例,可來從另一個角度間接回答此問題。
某客戶一種型號為6150的車床,卡盤為10寸(直徑約250mm)液壓卡盤,為了達到單邊7mm的切削能力,利用主軸電機(交流異步電機)的低速大扭矩(轉(zhuǎn)矩)特性,擬選取一款7.5kw額定轉(zhuǎn)速1000轉(zhuǎn)的電機,同時使用1:2傳動比(減速)的齒輪。
已知傳動比和功率、轉(zhuǎn)矩成正比,即使用1:2的傳動比,7.5kw的電機達到了15kw、同時2倍轉(zhuǎn)矩(注意,此處不是指2倍額定轉(zhuǎn)矩)的特性。如果選擇的是15kw的電機,價格就要貴不少,安裝尺寸也要變大;而加工出1:2傳動比的一對齒輪不需要很多錢。
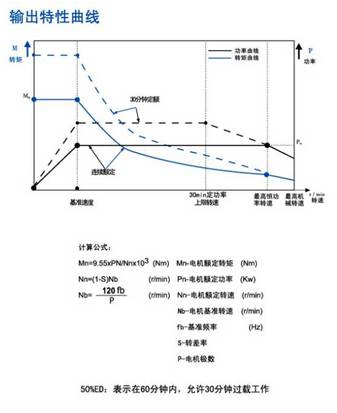
不明白的可查看下面這張異步電機功率、轉(zhuǎn)矩特性曲線圖。(注意:和直流電機不同,異步電機是可能工作在超過橫轉(zhuǎn)矩區(qū)的。)
除了獲得低速、大扭矩特性,機器人上用的直流電機可能也有這方面原因,而所用的減速機的傳動比可能更大(2級傳動或更高)。
當(dāng)然,使用減速機并不是完美的,還是有一些缺點,但是,兩相比較之下,還是使用減速機更為合適。
使用減速機之缺點:
1. 如果配置了減速機而編碼器又裝在電機端的話,減速機的制造精度會影響實際精度;
2. 多級減速機里的齒隙油膜厚度變化等小誤差經(jīng)過多級放大還是會造成重復(fù)精度的下降;
3. 還有減速機畢竟有齒輪嚙合或是柔輪變形,有壽命限制;
4. 對多連桿機構(gòu)齒隙的非線性耦合使得機器人的絕對精度較差,所以工業(yè)機器人只談重復(fù)定位精度不談絕對精度,從而使得機器人很難純粹地進行離線編程,提高了部署的難度和成本。
以上就是為什么不能直接控制伺服電機轉(zhuǎn)子轉(zhuǎn)速來控制關(guān)節(jié)運動,而是需要使用減速器的原因。雖然現(xiàn)在有直驅(qū)電機驅(qū)動的機器人,但是由于上述問題,成熟度上還差一些。
總之,工業(yè)機器人上用減速機就是用電機容易達到的高轉(zhuǎn)速換取電機不易做到的高扭矩和低質(zhì)量。
-
機器人
+關(guān)注
關(guān)注
211文章
28632瀏覽量
207979 -
控制
+關(guān)注
關(guān)注
4文章
1014瀏覽量
122720 -
減速機
+關(guān)注
關(guān)注
2文章
563瀏覽量
24246
原文標題:使用減速機?為何不直接控制電機轉(zhuǎn)速來控制機器人關(guān)節(jié)運動?
文章出處:【微信號:wwygzxcpj,微信公眾號:電機技術(shù)及應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
控制器、伺服電機、減速機成機器人產(chǎn)業(yè)主要瓶頸
工業(yè)機器人所用的電機驅(qū)動系統(tǒng)
工業(yè)機器人的產(chǎn)業(yè)鏈
減速機在工業(yè)機器人的應(yīng)用
工業(yè)機器人的末端關(guān)節(jié)旋轉(zhuǎn)該精確控制?
桁架機器人核心配件介紹
機器人關(guān)節(jié)用什么電機?
為什么工業(yè)機器人還需要減速器呢
機器人系統(tǒng)與控制需求簡介
為什么使用減速器代替電機轉(zhuǎn)速來控制機器人關(guān)節(jié)運動?
為什么不能直接使用控制電機轉(zhuǎn)速控制關(guān)節(jié)運動,還需要使用減速器概述
如何利用減速器替代電機轉(zhuǎn)速控制機器人運動
機器人的關(guān)節(jié)是如何做到精準控制的?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論