") 如何通過(guò)FPGA實(shí)現(xiàn)顯示年、月、日、周、時(shí)、分、秒且能精準(zhǔn)校時(shí)的數(shù)字時(shí)鐘
如何通過(guò)FPGA實(shí)現(xiàn)顯示年、月、日、周、時(shí)、分、秒且能精準(zhǔn)校時(shí)的數(shù)字時(shí)鐘
數(shù)字時(shí)鐘在FPGA設(shè)計(jì)中較為常見(jiàn),其主要包含時(shí)鐘、分鐘、秒鐘,以及必備的校時(shí)功能,當(dāng)然還可以根據(jù)需要加入年、月,日,周,星期或者鬧鐘設(shè)置等元素。
在這里,我們給小伙伴分享如何通過(guò)FPGA實(shí)現(xiàn)顯示年、月、日、周、時(shí)、分、秒且能精準(zhǔn)校時(shí)的數(shù)字時(shí)鐘。
一、設(shè)計(jì)任務(wù)
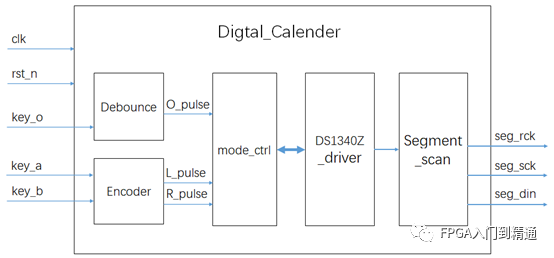
通過(guò)FPGA編程驅(qū)動(dòng)實(shí)時(shí)時(shí)鐘芯片DS1340Z,實(shí)現(xiàn)時(shí)間寫入和讀出的功能,驅(qū)動(dòng)旋轉(zhuǎn)編碼器獲取操作信息,根據(jù)編碼器操作信息控制數(shù)字時(shí)鐘的邏輯(包括時(shí)間調(diào)節(jié),顯示控制),最后驅(qū)動(dòng)數(shù)碼管顯示數(shù)字時(shí)鐘信息。
二、設(shè)計(jì)準(zhǔn)備
硬件:小腳丫FPGA核心板、時(shí)鐘芯片DS1340Z、旋轉(zhuǎn)編碼器、數(shù)碼管
軟件:Quartus Prime/Lattice Diamond
三、設(shè)計(jì)結(jié)構(gòu)
四、設(shè)計(jì)原理
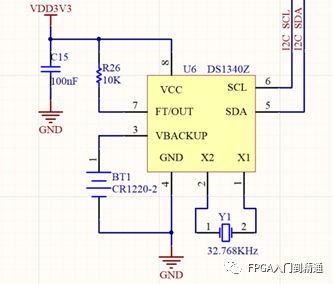
1.實(shí)時(shí)時(shí)鐘芯片DS1340Z模塊
實(shí)時(shí)時(shí)鐘芯片DS1340Z模塊電路圖如下(上拉電阻未顯示),模塊電路中有電池座,電池電壓范圍為1.3V~5.5V,當(dāng)安裝電池后底板掉電不影響實(shí)時(shí)時(shí)鐘芯片的運(yùn)行,重新上電后讀取實(shí)時(shí)時(shí)鐘數(shù)據(jù)。另外,芯片內(nèi)部集成了起振電阻電容,只需外置時(shí)鐘晶振32.768KHz直接連接即可。
2.旋轉(zhuǎn)編碼器模塊
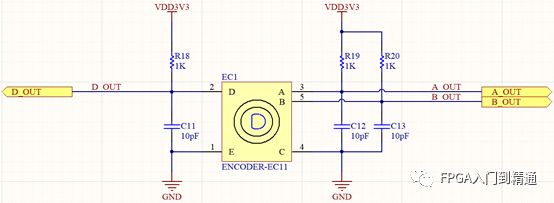
機(jī)械增量式旋轉(zhuǎn)編碼器,旋轉(zhuǎn)過(guò)程中提供周期性輸出,不能定位絕對(duì)位置,只能用于感知運(yùn)動(dòng)方向和增量,其電路圖如下,本設(shè)計(jì)所使用的旋轉(zhuǎn)編碼器為EC11系列的,支持按動(dòng)開(kāi)關(guān),共有5個(gè)管腳:
1、2管腳支持按動(dòng)開(kāi)關(guān),如同獨(dú)立按鍵連接方式。
3、4、5管腳支持旋轉(zhuǎn)編碼,4腳為公共端,3、5管腳分別為旋轉(zhuǎn)編碼器的A、B相輸出,如上圖所示,4腳接地,3、5管腳則需接上拉電阻,同時(shí)為了降低輸出脈沖信號(hào)的抖動(dòng)干擾,增加了電容到地做硬件去抖。
五、設(shè)計(jì)驅(qū)動(dòng)過(guò)程
1.DS1340Z驅(qū)動(dòng)設(shè)計(jì)
DS1340Z支持I2C通信400KHz快速模式同時(shí)兼容100KHz的標(biāo)準(zhǔn)模式,還有兩種模式下時(shí)序中的各種時(shí)間參數(shù),本設(shè)計(jì)中,通過(guò)分頻得到400KHz的時(shí)鐘。
I2C時(shí)序基本單元(啟動(dòng)、停止、發(fā)送、接收、發(fā)應(yīng)答、讀應(yīng)答)協(xié)議里統(tǒng)一的,所以所以基本單元狀態(tài)的設(shè)計(jì)也是不需要調(diào)整的。
啟動(dòng)時(shí)序狀態(tài)設(shè)計(jì)程序?qū)崿F(xiàn)同智能接近系統(tǒng)設(shè)計(jì)實(shí)驗(yàn)。
發(fā)送單元和讀應(yīng)答單元合并,時(shí)序狀態(tài)設(shè)計(jì)程序?qū)崿F(xiàn)同智能接近系統(tǒng)設(shè)計(jì)實(shí)驗(yàn)。
接收單元和寫應(yīng)答單元合并,時(shí)序狀態(tài)設(shè)計(jì)程序?qū)崿F(xiàn)同智能接近系統(tǒng)設(shè)計(jì)實(shí)驗(yàn)。
停止時(shí)序狀態(tài)設(shè)計(jì)程序?qū)崿F(xiàn)同智能接近系統(tǒng)設(shè)計(jì)實(shí)驗(yàn)。
DS1340Z芯片有很多寄存器,用于存儲(chǔ)實(shí)時(shí)時(shí)鐘的時(shí)間信息,同時(shí)芯片支持連續(xù)讀、寫寄存器操作(寄存器地址自加1),其設(shè)計(jì)程序?qū)崿F(xiàn)如下:
連續(xù)寫寄存器:
|
MAIN:begin if(cnt_main>=6'd11)//對(duì)MAIN中的子狀態(tài)執(zhí)行控制cnt_main cnt_main<=6'd0;?? // elsecnt_main<=cnt_main+1'b1;?? case(cnt_main) 6'd0:beginstate<=START;end?? //I2C通信時(shí)序中的START 6'd1:begindata_wr<=8'hd0;state<=WRITE;end???? //寫地址為8'hd0 6'd2:begindata_wr<=8'h00;state<=WRITE;end???? //8'h00,起始寄存器 6'd3:begindata_wr<=adj_sec;state<=WRITE;end?? //00寄存器地址,寫秒 6'd4:begindata_wr<=adj_min;state<=WRITE;end?? //01寄存器地址,寫分 6'd5:begindata_wr<=adj_hour;state<=WRITE;end? //02寄存器地址,寫時(shí) 6'd6:begindata_wr<=adj_week;state<=WRITE;end? //03寄存器地址,寫周 6'd7:begindata_wr<=adj_day;state<=WRITE;end?? //04寄存器地址,寫日 6'd8:begindata_wr<=adj_mon;state<=WRITE;end?? //05寄存器地址,寫月 6'd9:begindata_wr<=adj_year;state<=WRITE;end? //06寄存器地址,寫年 6'd10:begindata_wr<=8'h40;state<=WRITE;end? ?//07寄存器地址,8'h40 6'd11:beginstate<=STOP;end??? //I2C通信時(shí)序中的STOP default:state<=IDLE;//如果程序失控,進(jìn)入IDLE自復(fù)位狀態(tài) endcase end |
連續(xù)讀寄存器:
|
MAIN:begin if(cnt_main>=6'd32)//對(duì)MAIN中的子狀態(tài)執(zhí)行控制cnt_main cnt_main<=6'd12;???????? //否則只執(zhí)行時(shí)間讀取操作 elsecnt_main<=cnt_main+1'b1;?? case(cnt_main) 6'd12:beginstate<=START;end?? //I2C通信時(shí)序中的START 6'd13:begindata_wr<=8'hd0;state<=WRITE;end//寫地址為8'hd0 6'd14:begindata_wr<=8'h00;state<=WRITE;end//8'h00,寄存器初始地址 6'd15:beginstate<=START;end?? //I2C通信時(shí)序中的START 6'd16:begindata_wr<=8'hd1;state<=WRITE;end//讀地址為8'hd1 6'd17:beginack<=ACK;state<=READ;end??? //讀秒 6'd18:beginrtc_sec<=rtc_data_r;end 6'd19:beginack<=ACK;state<=READ;end??? //讀分 6'd20:beginrtc_min<=rtc_data_r;end 6'd21:beginack<=ACK;state<=READ;end??? //讀時(shí) 6'd22:beginrtc_hour<=rtc_data_r;end 6'd23:beginack<=ACK;state<=READ;end??? //讀周 6'd24:beginrtc_week<=rtc_data_r;end 6'd25:beginack<=ACK;state<=READ;end??? //讀日 6'd26:beginrtc_day<=rtc_data_r;end 6'd27:beginack<=ACK;state<=READ;end??? //讀月 6'd28:beginrtc_mon<=rtc_data_r;end 6'd29:beginack<=ACK;state<=READ;end??? //讀年 6'd30:beginrtc_year<=rtc_data_r;end 6'd31:beginack<=NACK;state<=READ;end?? //控制 6'd32:beginstate<=STOP;end??? //I2C通信時(shí)序中的STOP,讀取完成標(biāo)志 default:state<=IDLE;//如果程序失控,進(jìn)入IDLE自復(fù)位狀態(tài) endcase end |
上面兩段程序就是對(duì)于DS1340Z芯片的兩種操作,調(diào)時(shí)間和讀時(shí)間,對(duì)于時(shí)鐘來(lái)說(shuō)因?yàn)橛须姵?a target="_blank">供電,實(shí)時(shí)時(shí)鐘一直都處于工作狀態(tài),當(dāng)給FPGA上電時(shí)只需要讀時(shí)間即可,只有遇到時(shí)間不對(duì)的時(shí)候才需要調(diào)時(shí)間,所以DS1340Z驅(qū)動(dòng)模塊平時(shí)都在循環(huán)讀取時(shí)間,所以如果將調(diào)時(shí)間和讀時(shí)間的時(shí)序操作融合到同一個(gè)狀態(tài)下時(shí),對(duì)于cnt_main要加以控制,cnt_main初值為12,且運(yùn)行軌跡在12~32之間,控制程序調(diào)整如下:
|
if(cnt_main>=6'd32)//對(duì)MAIN中的子狀態(tài)執(zhí)行控制cnt_main if(set_flag)cnt_main<=6'd0;?? //當(dāng)set_flag被置位時(shí)才會(huì)執(zhí)行時(shí)間寫入操作 elsecnt_main<=6'd12;???????? //否則只執(zhí)行時(shí)間讀取操作 elsecnt_main<=cnt_main+1'b1;?? |
上面set_flag為時(shí)間調(diào)整標(biāo)志位,只有按動(dòng)編碼器在調(diào)時(shí)間模式時(shí)需要用到寫時(shí)間數(shù)據(jù)的操作流程,可以根據(jù)按鍵脈沖置位set_flag并自鎖,每次完成寫入操作后再將set_flag復(fù)位。程序?qū)崿F(xiàn)如下:
|
reg set_flag; always@(posedgeclkornegedgerst_n)begin if(!rst_n)set_flag<=1'b0; elseif(cnt_main==5'd11)set_flag<=1'b0;? //完成寫入時(shí)間操作復(fù)位set_flag elseif(key_set)set_flag<=1'b1;????????? //按鍵脈沖控制set_flag置位 elseset_flag<=set_flag; end |
模塊端口如下:
|
moduleDS1340Z_driver ( inputclk,rst_n,//系統(tǒng)時(shí)鐘和復(fù)位 inputkey_set, //按動(dòng)脈沖輸入 input[7:0]adj_hour,adj_min,adj_sec,//時(shí)分秒調(diào)整輸入 input[7:0]adj_year,adj_mon,adj_day,adj_week,//年份調(diào)整輸入 outputi2c_scl,//I2C總線SCL inout i2c_sda,//I2C總線SDA output[7:0]rtc_hour,rtc_min,rtc_sec,//實(shí)時(shí)時(shí)鐘輸出 output[7:0]rtc_year,rtc_mon,rtc_day,rtc_week //實(shí)時(shí)年份輸出 ); |
到這里就完成了萬(wàn)年歷中DS1340Z模塊的驅(qū)動(dòng)設(shè)計(jì),宏觀上講,該模塊的功能可以這樣描述:
正常模式下循環(huán)讀取時(shí)間信息,并把時(shí)間數(shù)據(jù)輸出
由旋轉(zhuǎn)編碼器按動(dòng)脈沖信號(hào)key_set觸發(fā)進(jìn)行一次寫操作,用于調(diào)節(jié)時(shí)間
每次寫操作調(diào)節(jié)時(shí)間的時(shí)間數(shù)據(jù)由其他模塊提供
2.旋轉(zhuǎn)編碼器驅(qū)動(dòng)設(shè)計(jì)
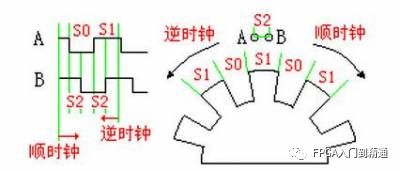
機(jī)械增量式旋轉(zhuǎn)編碼器的原理示意圖,中間圓形齒輪連接到旋轉(zhuǎn)編碼器的公共端4管腳,A、B兩個(gè)觸點(diǎn)連接到旋轉(zhuǎn)編碼器的A、B相輸出端3、5管腳,當(dāng)進(jìn)行旋轉(zhuǎn)操作時(shí),A、B觸點(diǎn)會(huì)先后接觸和錯(cuò)開(kāi)圓形齒輪,從而導(dǎo)致A、B相輸出信號(hào)產(chǎn)生相位不同的脈沖信號(hào):
順時(shí)針旋轉(zhuǎn)時(shí),A觸點(diǎn)超前于B觸點(diǎn)接觸和錯(cuò)開(kāi)圓形齒輪,A信號(hào)脈沖相位超前
逆時(shí)針旋轉(zhuǎn)時(shí),B觸點(diǎn)超前于A觸點(diǎn)接觸和錯(cuò)開(kāi)圓形齒輪,B信號(hào)脈沖相位超前
對(duì)A信號(hào)采樣程序?qū)崿F(xiàn)如下(對(duì)B信號(hào)一樣):
|
regkey_a_r,key_a_r1,key_a_r2; //消除亞穩(wěn)態(tài) always@(posedgeclk_500us)begin key_a_r<=? ?key_a; key_a_r1<=? ?key_a_r; key_a_r2<=? ?key_a_r1; end |
然后簡(jiǎn)單去抖處理程序?qū)崿F(xiàn)如下(對(duì)B信號(hào)一樣):
|
regA_state; //簡(jiǎn)單去抖動(dòng)處理 always@(key_a_r1orkey_a_r2)begin case({key_a_r1,key_a_r2}) 2'b11: A_state<=1'b1; 2'b00: A_state<=1'b0; default:A_state<=A_state; endcase end |
檢測(cè)A信號(hào)的邊沿程序?qū)崿F(xiàn)如下:
|
regA_state_r,A_state_r1; //對(duì)A_state信號(hào)進(jìn)行邊沿檢測(cè) always@(posedgeclk)begin A_state_r<=A_state; A_state_r1<=A_state_r; end wire A_pos=(!A_state_r1)&&A_state_r; wire A_neg=A_state_r1&&(!A_state_r); |
最后根據(jù)A信號(hào)邊沿與B信號(hào)的狀態(tài)組合判定旋轉(zhuǎn)的信息。
旋轉(zhuǎn)脈沖輸出程序?qū)崿F(xiàn)如下:
|
//當(dāng)A的上升沿伴隨B的高電平或當(dāng)A的下降沿伴隨B的低電平為向左旋轉(zhuǎn) always@(posedgeclkornegedgerst_n)begin if(!rst_n)L_pulse<=1'b0; elseif((A_pos&&B_state)||(A_neg&&(!B_state)))L_pulse<=1'b1; elseL_pulse<=1'b0; end //當(dāng)A的上升沿伴隨B的低電平或當(dāng)A的下降沿伴隨B的高電平為向右旋轉(zhuǎn) always@(posedgeclkornegedgerst_n)begin if(!rst_n)R_pulse<=1'b0; elseif((A_pos&&(!B_state))||(A_neg&&B_state))R_pulse<=1'b1; elseR_pulse<=1'b0; end |
通過(guò)上面程序最終實(shí)現(xiàn)了左旋右旋的脈沖輸出,脈沖的脈寬等于系統(tǒng)時(shí)鐘的周期。
3.模式控制:
本設(shè)計(jì)要實(shí)現(xiàn)8個(gè)模式(常態(tài)、調(diào)年、調(diào)月、調(diào)日、調(diào)周、調(diào)時(shí)、調(diào)分、調(diào)秒),對(duì)8個(gè)狀態(tài)編碼,常態(tài)—0、調(diào)秒—1、調(diào)分—2、調(diào)時(shí)—3、調(diào)周—4、調(diào)日—5、調(diào)月—6、調(diào)年—7,通過(guò)按動(dòng)旋轉(zhuǎn)編碼器切換,按照常識(shí)調(diào)時(shí)間從大到小調(diào)節(jié),先調(diào)節(jié)年份最后調(diào)秒鐘,所以我們這8個(gè)狀態(tài)的狀態(tài)機(jī)跳轉(zhuǎn)順序是固定的(0→7→6→5→4→3→2→1→0),依次循環(huán)跳轉(zhuǎn),程序?qū)崿F(xiàn)如下:
|
//時(shí)鐘運(yùn)行狀態(tài)控制 always@(posedgeclkornegedgerst_n) if(!rst_n)state<=3'd0; elseif(O_pulse)//按鍵脈沖控制時(shí)鐘運(yùn)行狀態(tài)的跳變, if(state)state<=state-3'd1; elsestate<=3'd7; elsestate<=state; |
4.調(diào)時(shí)控制:
調(diào)時(shí)控制在不同的調(diào)節(jié)模式對(duì)不同時(shí)間進(jìn)行調(diào)整,我們分別以常態(tài)模式和調(diào)秒模式為例進(jìn)行分析。時(shí)間調(diào)節(jié)要以當(dāng)時(shí)的時(shí)間為基礎(chǔ),常態(tài)模式下不需要調(diào)整任何時(shí)間,但是可以將實(shí)時(shí)時(shí)鐘讀出的時(shí)間數(shù)據(jù)賦給調(diào)節(jié)變量,這樣等跳轉(zhuǎn)到調(diào)節(jié)模式時(shí)對(duì)調(diào)節(jié)變量的控制就是以當(dāng)時(shí)的時(shí)間為基礎(chǔ)了,程序?qū)崿F(xiàn)如下:
|
3'd0: //正常模式 begin if(O_pulse)begin //在常態(tài)下按動(dòng)編碼器將當(dāng)前實(shí)時(shí)時(shí)間賦值給調(diào)節(jié)寄存器 adj_sec<=rtc_sec; adj_min<=rtc_min; adj_hour<=rtc_hour; adj_week<=rtc_week; adj_day<=rtc_day; adj_mon<=rtc_mon; adj_year<=rtc_year; end end |
調(diào)秒模式與其他調(diào)節(jié)模式操作一樣,不同的是調(diào)節(jié)的規(guī)則不同,例如秒和分的調(diào)節(jié)范圍為0~59,小時(shí)調(diào)節(jié)范圍0~11或0~23,日期調(diào)節(jié)范圍需要考慮年和月的值(1、3、5、7、8、10、12月范圍1~31,4、6、9、11月范圍1~30,2月平年范圍1~28,2月閏年范圍1~29),周調(diào)節(jié)范圍1~7,月調(diào)節(jié)范圍1~12,年調(diào)節(jié)范圍0~99。對(duì)秒鐘數(shù)據(jù)進(jìn)行調(diào)節(jié),程序?qū)崿F(xiàn)如下:
|
3'd1: //調(diào)秒模式 begin if(L_pulse)begin//逆時(shí)針轉(zhuǎn) if(adj_sec[3:0])adj_sec<=adj_sec-1'h1; elseif(adj_sec[7:4])adj_sec<={adj_sec[7:4]-1'h1,4'h9}; elseadj_sec<=8'h59; endelseif(R_pulse)begin//順時(shí)針轉(zhuǎn) if(adj_sec[3:0]!=4'h9)adj_sec<=adj_sec+1'h1; elseif(adj_sec[7:4]!=4'h5)adj_sec<={adj_sec[7:4]+1'h1,4'h0}; elseadj_sec<=8'h00; endelseadj_sec<=adj_sec; end |
5.顯示控制:
首先使用8位數(shù)碼管分兩頁(yè)顯示時(shí)鐘數(shù)據(jù),第一頁(yè)顯示年月日周,第二頁(yè)顯示時(shí)分秒。任何一項(xiàng)時(shí)間選項(xiàng)都由兩位數(shù)碼管顯示,每頁(yè)最多顯示4個(gè)時(shí)間選項(xiàng),我們可以使用4位的變量disp_en[3:0]控制4個(gè)時(shí)間選項(xiàng)的點(diǎn)亮或熄滅,disp_en[3]控制最左側(cè)兩個(gè)數(shù)碼管,disp_en[0]控制最右側(cè)兩個(gè)數(shù)碼管,我們分別以常態(tài)模式和調(diào)秒模式為例進(jìn)行顯示使能控制的分析。常態(tài)模式下,轉(zhuǎn)動(dòng)編碼器控制顯示頁(yè)碼,兩個(gè)頁(yè)碼對(duì)應(yīng)的顯示控制,程序?qū)崿F(xiàn)如下:
|
3'd0: //正常模式 if(L_pulse)disp_en<=4'b1111;?? ?//逆時(shí)針轉(zhuǎn)顯示第一頁(yè),數(shù)碼管全亮 elseif(R_pulse)disp_en<=4'b0111;//順時(shí)針轉(zhuǎn)顯示第二頁(yè),時(shí)分秒亮 elsedisp_en<=disp_en; |
調(diào)秒模式下,小時(shí)和分鐘數(shù)碼管點(diǎn)亮,秒鐘閃爍顯示,轉(zhuǎn)動(dòng)編碼器時(shí)秒鐘強(qiáng)制顯示,最后按動(dòng)旋轉(zhuǎn)編碼器切到常態(tài)模式時(shí),時(shí)分秒數(shù)碼管都回復(fù)顯示,程序?qū)崿F(xiàn)如下:
|
3'd1:begin //調(diào)秒模式 disp_en[3:1]<=3'b011;//時(shí)和分顯示 if(L_pulse|R_pulse)disp_en[0]<=1'b1;//轉(zhuǎn)動(dòng)時(shí)強(qiáng)制顯示 elseif(sec_pulse)disp_en[0]<=~disp_en[0];//秒鐘閃爍顯示 elseif(O_pulse)disp_en<=4'b0111;//返回常態(tài)時(shí)顯示時(shí)分秒 elsedisp_en[0]<=disp_en[0]; end |
數(shù)碼管與時(shí)間選項(xiàng)是對(duì)應(yīng)關(guān)系,每個(gè)選項(xiàng)對(duì)應(yīng)兩位數(shù)碼管,程序?qū)崿F(xiàn)如下:
|
wire[7:0]data_en=//數(shù)碼管位選控制 {{2{disp_en[3]}},{2{disp_en[2]}},{2{disp_en[1]}},{2{disp_en[0]}}}; wire[7:0]dot_en=//數(shù)碼管小數(shù)點(diǎn)顯示控制 {1'b0,disp_en[3],1'b0,disp_en[2],1'b0,disp_en[1],1'b0,disp_en[0]}; |
時(shí)鐘顯示分兩頁(yè)實(shí)現(xiàn),我們以最右側(cè)兩個(gè)數(shù)碼管顯示內(nèi)容為例,這兩位數(shù)碼管在第一頁(yè)中顯示周數(shù)據(jù),在第二頁(yè)中顯示秒數(shù)據(jù),那么我們?cè)趺纯刂骑@示內(nèi)容呢?分析,萬(wàn)年歷8中模式,
常態(tài)模式下,顯示讀取的實(shí)時(shí)時(shí)鐘數(shù)據(jù),具體顯示周還是秒再次細(xì)化
? disp_en等于4'b1111的時(shí)候,對(duì)應(yīng)第一頁(yè),顯示周數(shù)據(jù)
? disp_en等于4'b0111的時(shí)候,對(duì)應(yīng)第二頁(yè),顯示秒數(shù)據(jù)
常態(tài)模式下,根據(jù)disp_en選擇顯示周數(shù)據(jù)還是秒數(shù)據(jù),程序?qū)崿F(xiàn)如下:
|
//常態(tài)下數(shù)碼管顯示數(shù)據(jù) wire[7:0]data_rtc0=disp_en[3]?rtc_week:rtc_sec; |
調(diào)節(jié)模式下,顯示寫入的調(diào)節(jié)時(shí)鐘數(shù)據(jù),具體顯示周還是秒再次細(xì)化
? 調(diào)年、調(diào)月、調(diào)日、調(diào)周 狀態(tài)下(state>=3),對(duì)應(yīng)第一頁(yè),顯示周數(shù)據(jù)
? 調(diào)時(shí)、調(diào)分、調(diào)秒 狀態(tài)下(state<3),對(duì)應(yīng)第二頁(yè),顯示秒數(shù)據(jù)
調(diào)節(jié)模式下,根據(jù)state選擇顯示周數(shù)據(jù)還是秒數(shù)據(jù),程序?qū)崿F(xiàn)如下:
|
//調(diào)節(jié)狀態(tài)下數(shù)碼管顯示數(shù)據(jù) wire[7:0]data_adj0=state[2]?adj_week:adj_sec; |
最后根據(jù)常態(tài)模式還是調(diào)節(jié)模式控制數(shù)碼管顯示實(shí)時(shí)時(shí)鐘數(shù)據(jù)還是調(diào)節(jié)時(shí)鐘數(shù)據(jù)
根據(jù)state選擇顯示實(shí)時(shí)時(shí)鐘數(shù)據(jù)還是調(diào)節(jié)時(shí)鐘數(shù)據(jù),程序?qū)崿F(xiàn)如下:
|
//根據(jù)狀態(tài)選擇顯示常態(tài)數(shù)據(jù)還是調(diào)節(jié)狀態(tài)數(shù)據(jù) assign{data_7,data_8}=state?data_adj0:data_rtc3; |
到這里為止,就完成了數(shù)字時(shí)鐘的設(shè)計(jì),當(dāng)然在本設(shè)計(jì)中,可以通過(guò)簡(jiǎn)化只留下時(shí)分秒及調(diào)時(shí)功能,實(shí)現(xiàn)24小時(shí)計(jì)時(shí),省去對(duì)于頁(yè)的判斷。同時(shí)對(duì)于旋轉(zhuǎn)編碼器有難度的,可以改為按鍵調(diào)時(shí)。有興趣的小伙伴可以動(dòng)手試試哦~
-
FPGA
+關(guān)注
關(guān)注
1630文章
21784瀏覽量
605034 -
編碼器
+關(guān)注
關(guān)注
45文章
3663瀏覽量
135017 -
數(shù)字時(shí)鐘
+關(guān)注
關(guān)注
2文章
151瀏覽量
20408
原文標(biāo)題:FPGA畢設(shè)系列 | 1.數(shù)字時(shí)鐘
文章出處:【微信號(hào):xiaojiaoyafpga,微信公眾號(hào):電子森林】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
[原創(chuàng)]基于FPGA萬(wàn)年歷12864顯示—年-生肖-月-日-時(shí)-分-秒-星.....
12時(shí)制數(shù)字顯示電子鐘,MCU為L(zhǎng)PC2103/2106
如何將時(shí)間分開(kāi)顯示為年 月 日 時(shí) 分 秒 毫秒
FPGA實(shí)現(xiàn)顯示萬(wàn)年歷電子時(shí)鐘
EAD萬(wàn)年歷實(shí)訓(xùn)報(bào)告及Verilog HDL源碼
EAD萬(wàn)年歷實(shí)訓(xùn)報(bào)告及Verilog HDL源碼
89c51時(shí)鐘萬(wàn)年歷
如何去實(shí)現(xiàn)一種基于51單片機(jī)的電子時(shí)鐘萬(wàn)年歷設(shè)計(jì)
基于FPGA設(shè)計(jì)實(shí)現(xiàn)一個(gè)多功能數(shù)字鐘相關(guān)資料分享
基于FPGA的數(shù)字時(shí)鐘設(shè)計(jì)
基于Multisim數(shù)字時(shí)鐘的設(shè)計(jì)與仿真

鋯石FPGA A4_Nano開(kāi)發(fā)板視頻:數(shù)字時(shí)鐘的項(xiàng)目工程講解

設(shè)計(jì)數(shù)字時(shí)鐘的設(shè)計(jì)報(bào)告






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論