") ACC自適應(yīng)巡航控制系統(tǒng)介紹
ACC自適應(yīng)巡航控制系統(tǒng)介紹
本文是關(guān)于ACC自適應(yīng)巡航控制系統(tǒng)的介紹,羅孚從個人視角出發(fā),描述對ACC系統(tǒng)的理解,以及在一些使用場景下的思考。
什么是ACC?
ACC系統(tǒng)是在定速巡航裝置的基礎(chǔ)上發(fā)展而來的,區(qū)別在于定速巡航只能限定速度,方向盤和剎車還需要駕駛員控制,而ACC能夠較好的幫助駕駛員協(xié)調(diào)方向盤和剎車。定速巡航算是L1級別的自動駕駛,而ACC則可以算是L2級別的自動駕駛。
ACC主要有兩個參數(shù),車速和距離。如果“前面沒車”,那么可以使用駕駛員設(shè)定的期望車速來行車,這與定速巡航功能相當(dāng),如果配合車道保持LKA系統(tǒng),可以做到沿當(dāng)前車道一直行駛。如果前車很慢而導(dǎo)致本車不可能用期望車速來行駛,那么ACC可以使得兩車保持駕駛員設(shè)定的期望車距。在需要時,車輛會自動剎車和/或變速,以保持設(shè)置的車速或距離。在某些行駛狀況下,還會要求駕駛員主動進(jìn)行制動,這個警報信息會以聲音和視覺方式顯示出來。
ACC的使用方法
在介紹ACC原理之前,我們先來熟悉一下操作方法。
首先,打開ACC功能
ACC的所有操作功能都集成在了下圖的撥桿上,把撥桿向司機(jī)方向拉動,即可開啟ACC功能,把撥桿推回去則可以關(guān)閉ACC功能。
其次,設(shè)定期望車速
向上或向下推動操縱桿,可以提高或降低期望車速,車速可設(shè)置的范圍一般為30~200Km/h,默認(rèn)30Km/h開始,每推動一次,可以增加或減少10Km/h(有些步長是5Km/h),最后按下設(shè)置按鍵,即可保存車速,同時在儀表上也會顯示設(shè)置的速度值。補(bǔ)充一下,對于全速ACC,則可以做到0Km/h起步,沒有最低速度要求,這也是下文談到的停停走走(Stop & Go)功能的基礎(chǔ)。
再次,設(shè)定期望車距
本車和前車的車距,可以設(shè)置為4個等級,撥動滑動開關(guān)即可,默認(rèn)車距為3級。需要注意,此處的車距不是一個固定的長度距離,而是一個恒定的時間間隔,最終的車距取決于前面設(shè)置的車速。原因在于,1到4級分別代表了不一樣的響應(yīng)時間,分別是1.0s、1.3s、1.8s和2.3s,實際上撞車的風(fēng)險也是在于你的響應(yīng)時間,很多事故及早響應(yīng)都是能夠避免的。車距設(shè)置的建議,一般在暢通的高速上,等級設(shè)高,因為車速較快,安全第一,而在市區(qū)道路,等級設(shè)低,車速不快,同時保持良好的停停走走體驗。
最后,可以開始ACC了
除了以上三項設(shè)置外,還有行駛程序設(shè)置,即設(shè)置你的駕駛模式,有舒適、自動、運(yùn)動、高效和個性化幾種模式可供選擇。當(dāng)然還能設(shè)置提示音量大小。
當(dāng)你的車速超過30Km/h時,ACC就自動啟動了(全速ACC可以直接啟動),他就會自動加速到你設(shè)定的車速(如果前方?jīng)]有障礙物的話),然后在車速和車距上進(jìn)行保持。
是不是馬上就能獲得舒適的開車體驗了?是的,你可以把腳離開油門,甚至離開剎車都沒問題。當(dāng)然,離開方向盤不行,離開超過30秒會自動報警,畢竟不是自動駕駛,還是需要你來控制方向的。
除了這一些,還需要注意儀表上的顯示,正常情況下綠色顯示,在某些情況下,比如減速不能保持設(shè)定的車距,這時車輛就會發(fā)出警告,儀表會顯示紅色警告信息,同時會發(fā)出聲音報警。
ACC原理
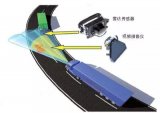
ACC功能主要利用了雷達(dá)技術(shù),通過毫米波雷達(dá),發(fā)射毫米波段的電磁波,利用障礙物反射波的時間差確定障礙物距離,利用反射波的頻率偏移確定相對速度。毫米波雷達(dá)穿透霧、煙、灰塵的能力強(qiáng),具有全天候(大雨天除外)全天時的優(yōu)點。ACC一般使用的是77GHz的長距離雷達(dá),距離可達(dá)100-200米。
ACC在技術(shù)實現(xiàn)上主要按以下四個步驟
第一步:距離測量
判斷同前方車輛的距離,如果沒有車輛(一般為毫米波雷達(dá)可探測的200米距離內(nèi)),那么車輛就開始按照設(shè)定的速度行駛。
第二步:確定前車速度
確定前車速度的目的在于獲得相對速度,通過第一步中的距離,可以推算出抵達(dá)前車所需要的時間,這個時間就可以和ACC設(shè)定的期望車距進(jìn)行比較了。(什么?時間和距離進(jìn)行比較?沒錯,這里和上文的ACC設(shè)置期望車距相呼應(yīng),期望車距實際是響應(yīng)時間)
第三步:確定前車位置
毫米波雷達(dá)的視場角雖然較小,但探測130米開外的物體,那探測寬度就可能超過三根車道,加上彎道等情況,雷達(dá)會判斷到前方多輛不同位置的車。
第四步:確定針對哪輛車來進(jìn)行調(diào)節(jié)
前一步是確定車輛和位置,這一步就需要確定跟隨車輛,這是一個重要的判斷決策,也是ACC安全保障的關(guān)鍵,需要協(xié)調(diào)車內(nèi)其他控制單元一起來判斷,比如車道識別單元。另外,本處的調(diào)節(jié),不僅僅是油門剎車這么簡單,有更多的傳感器單元參與其中,比如轉(zhuǎn)向角、車輪轉(zhuǎn)速等傳感器。
ACC附加功能
ACC的附加功能比較多,如變道輔助、超車輔助、彎道輔助、停停走走等功能,這里只介紹一個非常有用的功能,就是停停走走,英文是Stop & Go。當(dāng)然,不是所有具有ACC功能的車都配備了停停走走功能,還是有不少品牌車輛是不具備該功能的。
如果ACC的跟車功能主要用于高速公路駕駛,那么ACC下的停停走走主要用于市區(qū)道路。簡單的來說,停停走走功能依然是跟隨前方車輛,但前方車輛停下的時候,ACC車輛也會停下,前方車輛再次前進(jìn),ACC車輛也會自動加速。停停走走可以非常好的解決了跟車堵車或等紅綠燈的問題,緩解了市區(qū)復(fù)雜環(huán)境下開車疲勞問題,是女司機(jī)的福音:)
停停走走功能也是有弊端的,一方面在停住前的2-3米,車輛是以2Km/h的速度爬行過去的,另一方面停車的車距在3.5-4米之間。這些弊端可能是出于安全考慮,而且國外行車環(huán)境也許相對文明,放在加塞搶道嚴(yán)重的國內(nèi)環(huán)境,恐怕不知道被搶道超車多少次了,這種情況下走走停停的感受應(yīng)該會很差吧。除了距離因素,還有時間因素,自動啟動是在3秒后生效,對于擁堵的情況,多停3秒,給旁邊的車輛增加了加塞的機(jī)會,也加劇了碰撞的風(fēng)險。
ACC的優(yōu)勢和問題
ACC開發(fā)的初衷就是緩解疲勞,提高駕駛舒適度,這是毋庸置疑的優(yōu)勢。ACC也是自動駕駛前的初級功能,結(jié)合車道保持LKA、前向碰撞預(yù)警FCW、自動緊急制動AEB、變道輔助等系統(tǒng),可以獲得半自動駕駛的良好體驗。ACC不僅僅用于高速環(huán)境,其走走停停功能更能用于市區(qū)擁堵環(huán)境,使用環(huán)境更廣泛,輔助人類駕駛的作用更為突出。
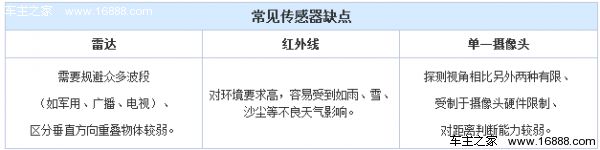
雖然ACC功能非常強(qiáng)大,但也存在劣勢。我們列舉一些常見的問題。
ACC能跟車轉(zhuǎn)彎嗎?
大部分情況應(yīng)該是無法跟車轉(zhuǎn)彎的,90度彎和急彎應(yīng)該都是過不了的,一方面雷達(dá)探測自身的局限性,另一方面在路口沒有車道線,其車道保持功能也無法起作用。對于緩拐(如下匝道岔路口)和彎道(如高速小彎),ACC(實際上是車道保持系統(tǒng))可以完成小幅度的拐彎,但對于稍大的彎,車輛就有可能判斷錯車輛而出現(xiàn)短暫急加速或急減速的情況。所以不要指望ACC能像車隊自駕一樣跟車,只要能完成高速跟車和市區(qū)堵車跟車就已經(jīng)非常了不起了,對于拐彎的情況,還是自己多多把控吧。
ACC能識別摩托或行人嗎?
如果在市區(qū)停停走走時,遇到加塞,即便碰了,那也是車車事故,那如果遇到行人或摩托呢?好問題,羅孚至今也沒有明白,據(jù)說這又屬于行人識別和行人保護(hù)兩個功能,行人識別是只識別不減速,行人保護(hù)是識別并剎車,這兩個功能是在ACC功能之外的,僅僅ACC的話,是無法識別行人的。對于市區(qū)環(huán)境,行人亂穿馬路、電動車騎到機(jī)動車道等情況時有發(fā)生,使用ACC時還是多注意剎車吧。
ACC安全嗎?
這是一個中立的問題,回答也是中立的,正是因為安全,所以車企才會將此功能開放給客戶,但又是不安全的,不安全的因素也很多,如惡劣天氣、加塞判斷不夠靈敏、剎車不夠及時或力度、前方掛車異行物體判斷錯誤等,同時更有駕駛員自身因素,使用ACC時沒有保持警惕,甚至忽略了ACC的報警等。總的來說,建議在路況良好的情況下使用ACC,享受舒適的同時保持警惕,右腳依然不能離開剎車,該剎車時還是要自己主動剎車,這才是ACC正確的使用姿勢:)
-
巡航控制系統(tǒng)
+關(guān)注
關(guān)注
0文章
9瀏覽量
7555 -
ACC
+關(guān)注
關(guān)注
1文章
57瀏覽量
22783
原文標(biāo)題:ACC自適應(yīng)巡航控制系統(tǒng)介紹
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
談?wù)?b class='flag-5'>ACC自適應(yīng)巡航技術(shù)的優(yōu)缺點
什么是汽車自適應(yīng)巡航控制系統(tǒng)
詳細(xì)剖析ACC自適應(yīng)巡航系統(tǒng)
一文讀懂自適應(yīng)巡航系統(tǒng)
ACC自適應(yīng)巡航技術(shù)——自動駕駛
自適應(yīng)巡航是什么?它與定速巡航有區(qū)別嗎?
自適應(yīng)巡航是什么
Traxen推出智能自適應(yīng)巡航控制系統(tǒng)iQ-Cruise
中國乘用車自適應(yīng)巡航控制ACC數(shù)據(jù)月報

汽車自適應(yīng)巡航控制系統(tǒng)(ACC)下篇
汽車自適應(yīng)巡航控制系統(tǒng)(ACC)技術(shù)詳解
自適應(yīng)巡航控制系統(tǒng)的工作原理及應(yīng)用
什么是ACC ACC自適應(yīng)巡航系統(tǒng)的雷達(dá)技術(shù)應(yīng)用

自適應(yīng)巡航系統(tǒng)的組成及原理





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論