") MEMS傳感器在工業(yè)自動(dòng)化中的設(shè)計(jì)
MEMS傳感器在工業(yè)自動(dòng)化中的設(shè)計(jì)
工業(yè)4.0和工業(yè)物聯(lián)網(wǎng)(IIoT)等計(jì)劃正在幫助制造企業(yè)提高生產(chǎn)流程的效率。基于云的分析應(yīng)用程序負(fù)責(zé)整理和提供運(yùn)行生產(chǎn)或制造操作的許多不同方面的上下文。這些應(yīng)用程序從工廠車間和每個(gè)制造設(shè)備中部署的傳感器中獲取重要數(shù)據(jù)。傳感器用于測量實(shí)時(shí)世界,并且在大多數(shù)情況下,將模擬測量轉(zhuǎn)換為數(shù)字信號(hào)。環(huán)境參數(shù)包括溫度,濕度和氣壓,但還有許多其他特性,如氣流,液壓流體壓力和接近度。其他類型的傳感器需要精確測量運(yùn)動(dòng)和相對(duì)位置。這些可包括用于機(jī)器人和自動(dòng)化的慣性導(dǎo)航,工業(yè)設(shè)備的狀態(tài)監(jiān)測以及沖擊檢測和記錄。微機(jī)電系統(tǒng)(MEMS)由于其緊湊的尺寸,低功率特性和極其精確的測量能力而越來越多地用于這些任務(wù)。本文將解釋基于MEMS的加速度計(jì)和陀螺儀設(shè)備如何工作,并展示一些專為工業(yè)自動(dòng)化應(yīng)用而設(shè)計(jì)的示例。
MEMS器件采用硅片構(gòu)建,其方式有多種非常小的移動(dòng)結(jié)構(gòu)。通常,這可能是一個(gè)結(jié)構(gòu)或質(zhì)量(檢驗(yàn)質(zhì)量),根據(jù)測量的內(nèi)容橫向或垂直移動(dòng)。這種運(yùn)動(dòng)或位移可能是加速力的結(jié)果,例如相對(duì)位置的變化。通常通過微機(jī)械元件之間的電容變化來檢測這些微觀運(yùn)動(dòng)的測量。重力本身產(chǎn)生1 g的恒定加速力,這是加速度計(jì)可以測量的,其傾斜度與加速度計(jì)相對(duì)于重力場的角度的正弦成正比。高精度模擬前端測量檢測質(zhì)量和固定結(jié)構(gòu)之間的電容,然后使用模數(shù)轉(zhuǎn)換器(ADC)將信號(hào)帶入數(shù)字域。然后使用微控制器處理所接收的數(shù)據(jù)以及許多基于軟件的濾波器,這些濾波器可以拒絕與有效運(yùn)動(dòng)無關(guān)的信號(hào)。單個(gè)基于質(zhì)量的單一MEMS傳感器可以在一個(gè)方向上檢測加速力,因此對(duì)于實(shí)際的3D目的,需要三個(gè)單獨(dú)的MEMS結(jié)構(gòu)(圖1)。
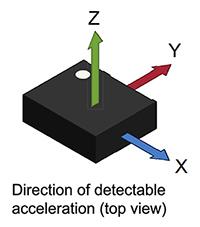
圖1:檢測3D加速度。
在檢測角速率變化時(shí),陀螺儀MEMS傳感器使用微機(jī)械振動(dòng)元件而不是旋轉(zhuǎn)機(jī)構(gòu)。該振動(dòng)元件保持在固定平面內(nèi),并且通過電容的變化檢測滾動(dòng),俯仰和偏航的角速率的變化(圖2)。作為測量過程的一部分,可以針對(duì)檢測到的任何加速度或振動(dòng)補(bǔ)償角速率。
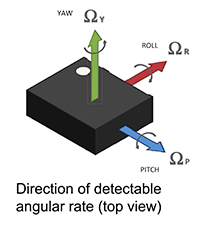
圖2:偏航,俯仰和滾轉(zhuǎn)的檢測使用MEMS陀螺儀的角速率。
能夠準(zhǔn)確連續(xù)地測量方向和角速率的變化是任何工業(yè)自動(dòng)化機(jī)械的重要組成部分,其中最值得注意的是工業(yè)機(jī)器人。過去,可能已經(jīng)使用了需要定期校準(zhǔn)和校準(zhǔn)的旋轉(zhuǎn)傳感器和編碼器的復(fù)雜機(jī)械布置。隨著MEMS加速度計(jì)和陀螺儀技術(shù)的出現(xiàn),對(duì)其潛在用途進(jìn)行了大量研究。該研究確定了需要將多個(gè)加速度計(jì)放置在工業(yè)機(jī)器人的6軸自由度(DOF)上(圖3a)。圖3b顯示了描述運(yùn)動(dòng)和角速率檢測的復(fù)雜性質(zhì)的圖表。
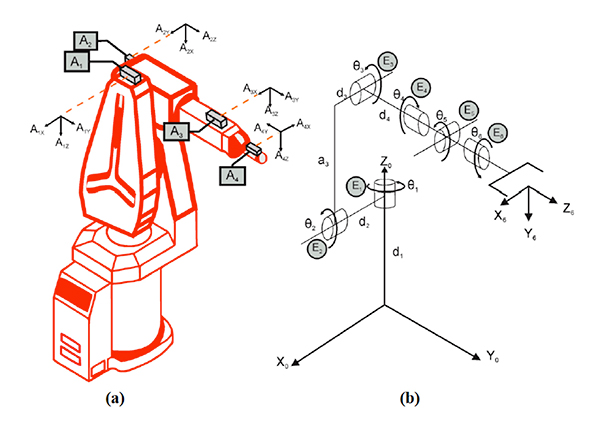
圖3:顯示加速度計(jì)放置的簡單工業(yè)機(jī)器人 - 圖圖3a-和圖表 - 圖3b-說明了為了在整個(gè)允許的范圍內(nèi)完全控制機(jī)器人而需要測量的不同參數(shù)的數(shù)量。
滿足當(dāng)今工業(yè)自動(dòng)化設(shè)備的需求是各種基于MEMS的組合3D加速度計(jì)和3D陀螺儀模塊,如STMicroelectronics的ISM330DLC。作為意法半導(dǎo)體全面的MEMS產(chǎn)品系列的新成員,ISM330DLC閉環(huán)系統(tǒng)級(jí)封裝(SIP)專為工業(yè)4.0應(yīng)用而設(shè)計(jì)。該器件的3D加速度計(jì)和3D陀螺儀均在同一硅片內(nèi)加工,從而確保了最佳的穩(wěn)定性和穩(wěn)健的操作。加速度計(jì)和陀螺儀都具有幾個(gè)高度準(zhǔn)確和可靠的可配置檢測范圍。滿量程加速范圍選項(xiàng)為+/- 2 g,+/- 4 g,+/- 8 g或+/- 16 g。陀螺儀的滿量程角速率檢測選項(xiàng)為+/- 125度/秒(dps),+/- 245 dps,+/- 500 dps,+/- 1000 dps或+/- 2000 dps。
《 p》采用1.71至3.6 VDC供電,接地柵陣列LGA-14L封裝模塊尺寸僅為2.5 mm x 3 mm x 0.83 mm,在高性能組合模式下工作時(shí)最大電流為0.7 mA。開發(fā)人員可以使用多種不同的省電模式,允許獨(dú)立關(guān)閉加速度計(jì)和陀螺儀,在此期間功耗可降至最低10μA。兩個(gè)傳感器的中間低功耗模式消耗不超過0.35 mA。在正常條件下運(yùn)行時(shí),功率通常會(huì)增加到0.5 mA。可以通過模塊的SPI或I 2 C串行接口實(shí)現(xiàn)與主機(jī)處理器的通信。如果需要額外的應(yīng)用要求,還可以配置輔助SPI輸出以提供傳感器數(shù)據(jù)的輔助和獨(dú)立通道。獨(dú)立的低通濾波器提供傳感器數(shù)據(jù),用于光學(xué)圖像穩(wěn)定(OIS)應(yīng)用。陀螺儀還配備了溫度傳感器。
ISM330DLC配備了許多智能功能,進(jìn)一步擴(kuò)展了設(shè)備的功能,可用于各種應(yīng)用。首先,提供傳感器集線器功能允許從多達(dá)四個(gè)額外的外部傳感器捕獲,存儲(chǔ)和處理數(shù)據(jù)。提供這種集線器功能對(duì)于不僅希望在其設(shè)計(jì)中添加加速度計(jì)和陀螺儀傳感器而且希望添加一些額外的傳感器以適應(yīng)應(yīng)用的開發(fā)人員特別有用。通過這種方式,傳感器可以直接連接到ISM3300DLC的I 2 C Master,而無需應(yīng)用處理器的任何資源。 4kbyte FIFO緩沖器提供了一種存儲(chǔ)該數(shù)據(jù)的便捷方法,無需從主機(jī)應(yīng)用處理器進(jìn)行任何中斷或資源分配。如果需要,可以對(duì)FIFO緩沖區(qū)進(jìn)行分區(qū),并且不僅可以存儲(chǔ)附加的外部傳感器數(shù)據(jù),還可以存儲(chǔ)每個(gè)條目的時(shí)間戳并記錄陀螺儀傳感器的溫度。
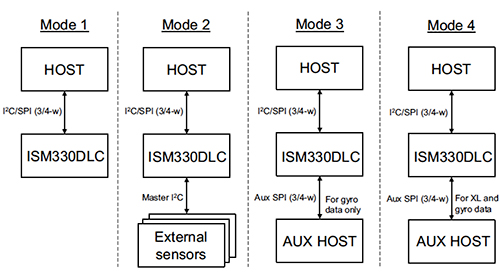
圖4:ISM330DLC連接模式。
上面的圖4說明了可能的四種不同連接模式。在模式1中,只有陀螺儀和加速度計(jì)有效并連接到主機(jī)應(yīng)用處理器。模式2增加了通過I 2 C接口從多達(dá)四個(gè)外部傳感器捕獲和存儲(chǔ)數(shù)據(jù)的功能。模式3和4允許陀螺儀數(shù)據(jù)(模式3)以及陀螺儀和加速度計(jì)數(shù)據(jù)(模式4)呈現(xiàn)給輔助SPI 3或4線接口。模塊的時(shí)鐘可以與外部源同步。
模塊的智能功能還包括幾個(gè)閉環(huán)功能,例如提供6D方向信息的能力,自由落體事件,設(shè)備喚醒功能省電模式和活動(dòng)/不活動(dòng)識(shí)別。另一種更適合與手持式工業(yè)控制設(shè)備的用戶界面交互的智能功能是能夠檢測單點(diǎn)擊或雙擊或點(diǎn)擊。
也許信號(hào)處理電路最重要的功能之一就是過濾。低通(LP)和高通(HP)濾波器的組合用于抑制不需要的外來信號(hào)對(duì)傳感器讀數(shù)的任何影響。通過輔助SPI接口提供單獨(dú)的專用低通濾波器用于穩(wěn)定控制環(huán)路 - 通常是光學(xué)圖像穩(wěn)定(OIS)。
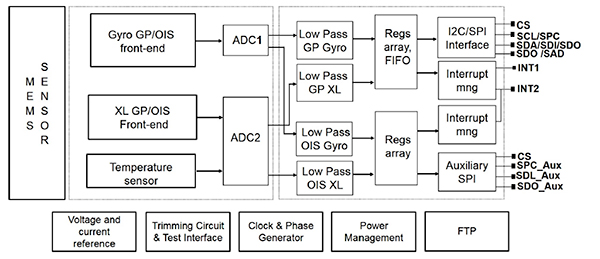
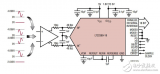
圖5:阻塞3D加速度計(jì)和3D陀螺儀濾波器的示意圖。
圖5顯示了從MEMS傳感器通過模數(shù)轉(zhuǎn)換器,濾波器模塊到主SPI/I 2的信號(hào)流 C接口。濾波器模塊的確切配置取決于許多因素,例如所選的輸出數(shù)據(jù)速率(ODR)和傳感器的滿量程檢測范圍。 ODR可配置為12.5 Hz至6.66 kHz。例如,當(dāng)在模式1操作中使用時(shí),數(shù)字信號(hào)處理僅針對(duì)主IO。在模式3和4中,在信號(hào)處理鏈中插入了額外的濾波器,以將輸出引導(dǎo)至輔助SPI接口(圖6)。
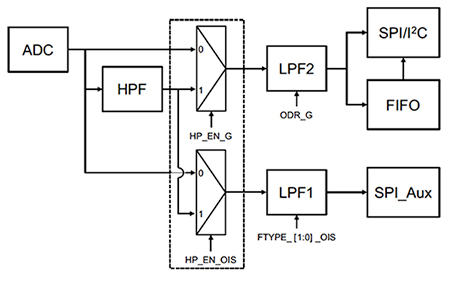
圖6:在模式3中使用時(shí)的陀螺儀數(shù)字信號(hào)處理鏈。
與任何新設(shè)備或技術(shù)一樣,范圍的可用性硬件和軟件工具極大地幫助了第一個(gè)設(shè)計(jì)的原型設(shè)計(jì)。在這方面,ISM330DLC得到了很好的支持。意法半導(dǎo)體已經(jīng)為此提供了全面的評(píng)估板,其中大部分基于STEVAL-MKI109V3 MEMS主板。這提供了一個(gè)完整的,隨時(shí)可用的開發(fā)和原型設(shè)計(jì)平臺(tái),可用于評(píng)估基于MEMS的設(shè)計(jì)(圖7)。
圖7 :STMicroelectronics的MEMS主板平臺(tái) - STEVAL-MKI109V3。
可以使用一系列不同的適配器板插入主板上的DIL24插座。對(duì)于ISM330DLC,適配器板是STEVAL-MKI182V1(圖8)。可以在PCB的中心看到ISM330DLC被一些無源元件包圍。
圖8:ISM330DLC適配器板 - STEVAL-MKI182V1。
主板托管STM32F401高性能105DMIPSArm?Cortex?-M4微控制器(MCU),充當(dāng)傳感器適配器之間的橋梁板和開發(fā)PC。該MCU包括一個(gè)浮點(diǎn)單元(FPU),這是需要執(zhí)行快速浮點(diǎn)計(jì)算的應(yīng)用程序的基本要求。它還配備了零等待狀態(tài)自適應(yīng)實(shí)時(shí)加速器,一組16位,32位和PWM定時(shí)器,以及多達(dá)12個(gè)接口,包括3 x I 2 C,3個(gè)USART ,4 x SPI和符合USB 2.0標(biāo)準(zhǔn)的全速控制器。主板的框圖如圖9所示.USB接口連接到PC,提供為主板和適配器供電的方法,同時(shí)促進(jìn)設(shè)備固件升級(jí)(DFU)過程,無需任何其他開發(fā)工具。
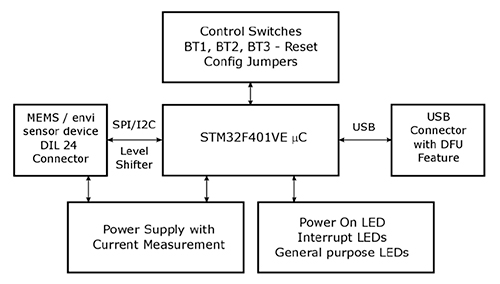
圖9:MEMS評(píng)估主板框圖。
對(duì)于PC,STMicroelectronics提供免費(fèi)的Unico Lite基于GUI的軟件應(yīng)用程序,顯示如何配置選定的MEMS傳感器并管理來自它的數(shù)據(jù)流。該軟件提供了一個(gè)可靠的平臺(tái),可以從中嘗試不同的輸出數(shù)據(jù)速率,檢測靈敏度和集成其他傳感器。初始設(shè)置屏幕如圖10所示,可在Microsoft Visual Studio中配置以滿足每個(gè)傳感器模塊的要求。
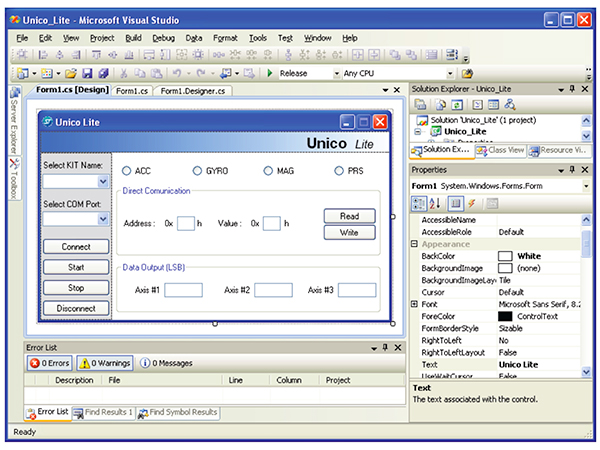
圖10 :Unico Lite軟件的圖形用戶界面,顯示在Microsoft Visual Studio中配置布局的功能。
一旦設(shè)置并運(yùn)行,Unico Lite軟件就可以實(shí)時(shí)顯示多個(gè)傳感器參數(shù),以說明它們對(duì)變化位置和角度移動(dòng)的反應(yīng)。
這樣,開發(fā)人員工業(yè)自動(dòng)化機(jī)械可以快速原型設(shè)計(jì),測試和調(diào)試初始設(shè)計(jì)。由于所有原理圖,Gerber和布局文件都是在開源的基礎(chǔ)上為主板和適配器板提供的,因此采用更完整的設(shè)計(jì)是一個(gè)非常簡單的過程。
傳感器的數(shù)量任何工業(yè)自動(dòng)化應(yīng)用中所需的,例如圖3中所示的工業(yè)機(jī)器人都是重要的。通過提供每個(gè)肢體空間位置的可靠和實(shí)時(shí)反饋,機(jī)器人的控制器和執(zhí)行器可以確保它將效應(yīng)器工具移動(dòng)到空間中的期望位置。但MEMS陀螺儀和加速度計(jì)不僅僅是為了確保位置控制。它們還可用于檢測旋轉(zhuǎn)或鉸接機(jī)械接頭中增加的振動(dòng),這些機(jī)械接頭開始出現(xiàn)過度磨損或即將發(fā)生故障的跡象。實(shí)施適當(dāng)?shù)念A(yù)防性維護(hù)制度是任何工業(yè)自動(dòng)化裝置的一個(gè)重要方面,MEMS傳感器的使用是傳感和監(jiān)測工廠運(yùn)行的關(guān)鍵組成部分。
結(jié)論
MEMS加速度計(jì)和陀螺儀非常適合用于各種工業(yè)自動(dòng)化應(yīng)用。憑借其微小的尺寸,高可靠性和低功耗認(rèn)證,MEMS傳感器幾乎可以在任何工業(yè)自動(dòng)化機(jī)械中發(fā)揮重要作用。
-
傳感器
+關(guān)注
關(guān)注
2552文章
51383瀏覽量
755939 -
mems
+關(guān)注
關(guān)注
129文章
3958瀏覽量
190996 -
自動(dòng)化
+關(guān)注
關(guān)注
29文章
5620瀏覽量
79541 -
工業(yè)物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
25文章
2384瀏覽量
64781
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
工業(yè)自動(dòng)化中傳感器數(shù)據(jù)采集的優(yōu)化
如何實(shí)現(xiàn)工業(yè)自動(dòng)化?傳感器對(duì)于工業(yè)自動(dòng)化有什么樣的意義
工業(yè)自動(dòng)化中常用的傳感器有哪些
工業(yè)傳感器為智能制造和工業(yè)自動(dòng)化提供了可能
工業(yè)自動(dòng)化幾種常用的傳感器

科普|傳感器在工業(yè)自動(dòng)化發(fā)展中的重要性分析

工業(yè)自動(dòng)化幾種常用的傳感器

TE傳感器在工業(yè)自動(dòng)化中的應(yīng)用

激光焊縫跟蹤傳感器在自動(dòng)化焊接流程中的作用
DC電源模塊在工業(yè)自動(dòng)化中的關(guān)鍵應(yīng)用案例分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論