") 以車用通信系統(tǒng)中的車載單元OBU為例說明該該系統(tǒng)的架構
以車用通信系統(tǒng)中的車載單元OBU為例說明該該系統(tǒng)的架構
最近解讀了一份CSAE(Chinese Society of Automotive Engineering,中國汽車工程學會,對照SAE美國汽車工程師學會)關于V2X的標準,《合作式智能運輸系統(tǒng) 車用通信系統(tǒng)應用層及應用數(shù)據交互標準》(TCSAE 53-2017),覺得蠻有意思,類似于那種...突然之間有了靈感,特意爬上來跟大家分享下。
前言中標準的支持單位中我有注意到,最后一位是“樂視汽車(北京)有限公司”,雖然賈老板賬目做的六,至少V2X這塊還是有不少IP的。
該標準主要參考引用了美標中《SAE J2735專用短程通信消息集字典(Dedicated Short Range Communications(DRSC) Message Set Dictionary)》以及《SAE J2945/1 V2V車載安全通信系統(tǒng)性能需求(On-Board System Requirement for V2V Safety Communications)》兩份,其他的沒了,所以...你們懂的~
標準中以車用通信系統(tǒng)中的車載單元OBU為例說明該系統(tǒng)的架構。車載設備通常包括了以下子系統(tǒng):
無線電通信子系統(tǒng):接收和發(fā)送空中信號
定位系統(tǒng):通常包含全球導航微信系統(tǒng)(GNSS,globalnavigationsatellitesystem)接收器,用以提供車輛的位置、方向、速度和時間等信息
車載設備處理單元:運行程序以生成需要發(fā)送的空中信號,以及處理接收的空中信號
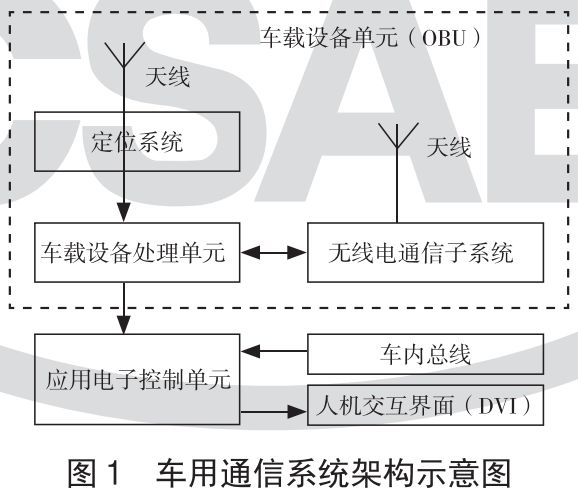
架構與T-BOX相差無幾,很容易理解其組成單元。
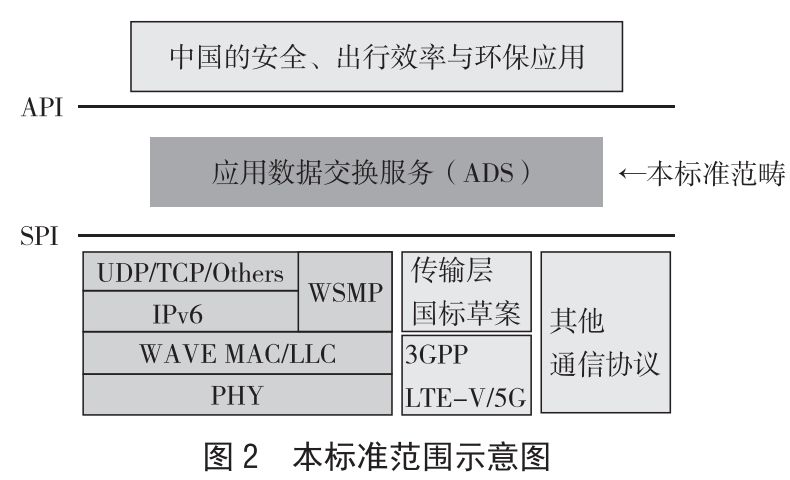
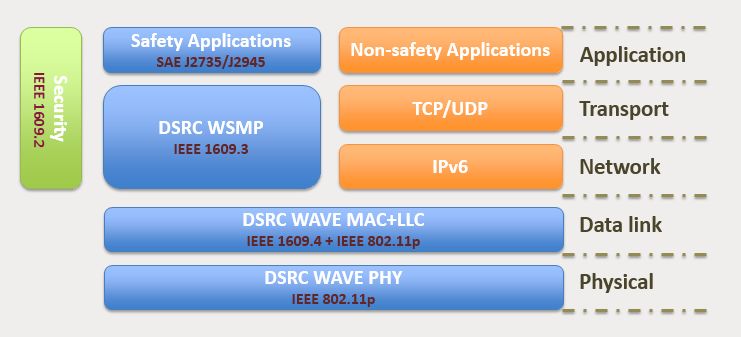
標準定義了合作市智能交通系統(tǒng)車用通信系統(tǒng)基礎應用及基本要求,定義了應用層數(shù)據集字典、數(shù)據交換標準及接口規(guī)范。注意這個地方實際說清楚了標準范圍,參考通信系統(tǒng)七層模型,示意如下:
接下來是非常重要的一張表,17個典型「一期」應用,涵蓋安全、效率、信息服務。
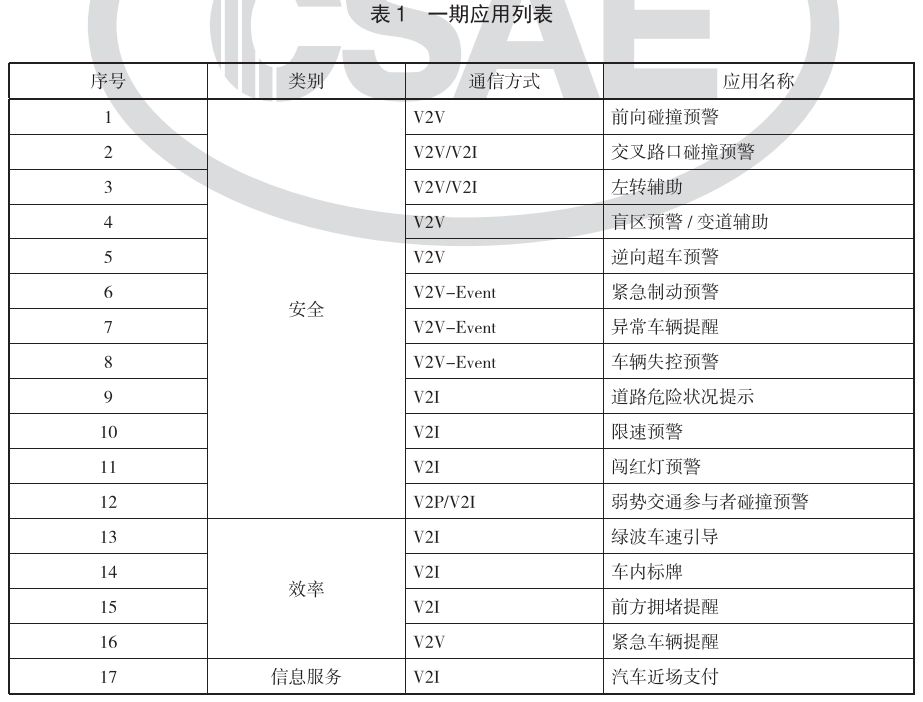
其中,
V2V:車載單元之間通訊,Vehicle to Vehicle
V2I:車載單元與路側單元通訊,Vehicle to Infratructure
V2P:車載單元與行人設備通訊,Vehicle to Pedestrains
為了方便索引,列舉如下:
前向碰撞預警Forward Collision Warning/FCW
交叉路口碰撞預警Intersection Collision Warning/ICW
左轉輔助Left turning Assistant/LTA
盲區(qū)預警/變道預警Blind Spot Warning/BSW、Lane Change Warning/LCW
逆向超車預警Do Not Pass Warning/DNPW
緊急制動預警Emergency Brake Warning/EBW
異常車輛提醒Abnormal Vehicle Warning/AVW
車輛失控預警Control Loss Warning/CLW
道路危險狀況提示Hazardous Location Warning/HLW
限速預警Speed Limit Warning/SLW
闖紅燈預警Red Light Violation Warning//RLVW
弱勢交通參與者碰撞預警Vulnerable Road User Collision Warning/VRUCW
綠波車速導引Green Light Optimal Speed Advisory/GLOSA
車內標牌In-Vehicle Signage/IVS
前方擁堵提醒Traffic Jam Warning/TJM
緊急車輛提醒Emergency Vehicle Warning/EVW
汽車近場支付Vehicle Near-Field Payment/VNFP
然后從應用定義、主要場景、系統(tǒng)基本原理、通信方式、基本性能要求和數(shù)據交互需求對17個一期應用分別進行了描述。我們就挑選第一個,前向碰撞預警Forward Collision Warning/FCW,簡單說明下。
應用定義不說了,對輔助駕駛了解的都應比較清楚;主要場景可參考下述圖示。
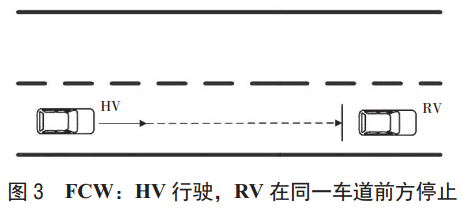
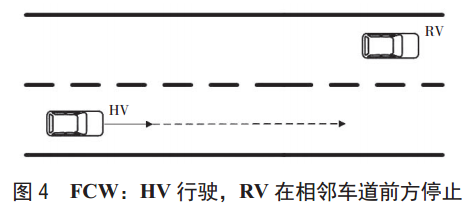
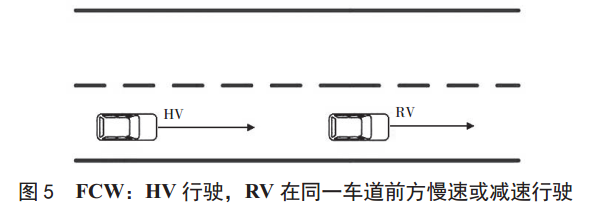

get到了嘛?「在駕駛員還參與駕駛過程情況下,上述場景的應用幾乎全都是雞肋」。唯一一個有想象空間的RV-1/RV-2(RV:遠車,Remote Vehicle)在標準還未統(tǒng)一、理念還未普及的情況下就是一個空中樓閣啊。
中間的幾項跳過去我們再看下“基本性能要求”:
主車車速范圍0~130km/h;
通信距離≥300m;
數(shù)據更新頻率小于等于10Hz;
系統(tǒng)延遲≤100ms;
定位精度≤1.5m。
除了“定位精度”其他的要求可以說低到塵埃了,定位精度1.5m的要求是為了識別主車道與相鄰車道。
“數(shù)據交互需求”詳見下表:

幾乎都是對新增定位系統(tǒng)以及慣導單元的要求,當前的汽車架構能滿足個50%頂天了(時刻、尺寸、速度、兩軸加速度、橫擺角速度)。
接下來標準對應用層交互數(shù)據集進行了定義。需要注意的是,V2X中的數(shù)據通訊大多采用廣播的方式(少部分事件觸發(fā)),所以這塊并未按照17個場景進行劃分而是直接針對5個最基本的消息體進行了定義:
Msg_BSM,Basic Safety Message/車輛基本安全消息;車輛之間交換安全狀態(tài)數(shù)據;
Msg_MAP,地圖消息,由路側單元廣播,向車輛傳遞局部區(qū)域的地圖信息。包括局部區(qū)域的路口信息、路段信息、車道信息,道路之間的連接關系等;
Msg_RSI,由路側單元項周圍車載單元發(fā)布的交通時間消息以及交通標志牌信息;
Msg_RSM,路側安全消息。路側單元通過路側本身擁有的相應檢測手段,得到其周邊交通參與者的實時狀態(tài)信息(包括路側單元本身、周圍車輛、非機動車、行人等),并將這些信息整理成本消息體所定義的格式,作為這些交通參與者的基本安全狀態(tài)信息,廣播給周邊車輛,支持這些車輛的相關應用;
Msg_SPAT,信號燈消息。包含一個或多個路口信號燈的當前狀態(tài)信息。結合MAP消息,為車輛提供實時的前方信號燈相位信息。
同樣,我們拿第一個消息體Msg_BSM按照“消息集-數(shù)據幀-數(shù)據元素”的形式展開,其數(shù)據幀構成如下(我關心應用層,具體格式做了舍棄處理):
MsgCount
vehicle ID
Reserved for Electronic Vehicle Identification(OPTIONAL)
DSecond
PositionED
PositionConfidenceSet
TranmissionState
Speed
Heading
SteeringWheelAngle(OPTIONAL)
MotionConfidenceSet(OPTIONAL)
AccelerationSet4Way
BrakeSystemStatus
VehicleSize
VehicleClassification
VehicleExtensions(OPTIONAL)
取其中BrakeSystemStatus為例,其數(shù)據元素構成如下:
brakePadel:剎車踏板踩下情況;
wheelBrakes:車輛車輪制動情況;
traction:牽引力控制系統(tǒng)作用情況;
abs:制動防抱死系統(tǒng)作用情況;
scs:車身穩(wěn)定控制系統(tǒng)作用情況;
brakeBoost:剎車助力系統(tǒng)作用情況;
auxBrakes:輔助制動系統(tǒng)(一般指手剎)情況。
然后針對數(shù)據元素DE_BrakePadelStatus進行了信號級別的定義,
0x00:UNAVAILABLE--vehicle brake padel detector is unavailable
0x01:OFF--vehicle's brake padel is not pressed
0x02:ON--vehicle's brake padel is pressed
至此,則完成了“應用層交互數(shù)據集”的定義。事實上,與傳統(tǒng)車載總線的信號矩陣框架類似,對車載總線了解的朋友應該很容易理解。
完成解讀之后,我個人的感覺如下:
當前來看,應用場景太雞肋;
國內法規(guī)標準不健全,普及道路漫長。
后來與業(yè)內朋友溝通,也將他們的觀點列舉如下(認同部分觀點):
國內目前沒有統(tǒng)一、成體系的標準或者協(xié)議,美國有全套DSRC相關的,這也是為什么2017年凱迪拉克在量產車型CTS上配備V2X;
目前通信距離能夠做到300m~1000m,時延能夠做到十幾毫秒內;
兩個典型的V2X使用案例,一個是交叉路口遮擋的情況,一個是連環(huán)相撞的情況。
對了,這位朋友在一家聚焦無人貨運的公司搞V2X。
-
通信系統(tǒng)
+關注
關注
6文章
1204瀏覽量
53431 -
車聯(lián)網
+關注
關注
76文章
2606瀏覽量
91744
原文標題:制定車聯(lián)網通信系統(tǒng)標準任重而道遠
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
MCU在車載系統(tǒng)中的展望
車載總線通信數(shù)據庫開發(fā)工具 - VDE
基于Pancake系統(tǒng)的折反射成像系統(tǒng)
車載衛(wèi)星應急通信系統(tǒng)
車聯(lián)網HIL仿真測試解決方案

愛普生晶體在車載系統(tǒng)應用案例-ADAS系統(tǒng)的部分應用
MSP430F5xx實現(xiàn)高速公路不停車收費系統(tǒng)(ETC)OBU單元HDLC

藍牙模塊在車載系統(tǒng)中的應用與集成:現(xiàn)狀、挑戰(zhàn)與未來展望
訊維應急通信指揮車系統(tǒng)工程案例
復雜環(huán)境下,車載中控系統(tǒng)如何助力指揮車高效運作
車載中控系統(tǒng):實現(xiàn)邊境巡邏指揮車的高效信息化管理

從數(shù)據到決策:車載中控系統(tǒng)在空中交通指揮車中的應用探索
城市反恐新利器:車載中控系統(tǒng)在特警指揮車中的實戰(zhàn)應用
五部委將聯(lián)合開展智能網聯(lián)汽車“車路云一體化”應用試點工作





 工商網監(jiān)
工商網監(jiān)
評論