") 揭秘:GPS北斗衛(wèi)星+慣性組合導(dǎo)航模塊有哪些優(yōu)勢(shì)呢?
揭秘:GPS北斗衛(wèi)星+慣性組合導(dǎo)航模塊有哪些優(yōu)勢(shì)呢?
GPS北斗衛(wèi)星+慣性組合導(dǎo)航模塊有哪些優(yōu)勢(shì)呢?普通GPS北斗模塊在環(huán)境復(fù)雜的城市環(huán)境中定位沒(méi)有那么精確,時(shí)常出現(xiàn)漂移、定位慢、無(wú)法定位等情況,比如在高架橋下,在穿山隧道里面,衛(wèi)星信號(hào)微弱或者完全沒(méi)有衛(wèi)星信號(hào)的環(huán)境中,GPS北斗模塊是沒(méi)辦法很好的定位的。這種情況下,選用GPS+慣性組合導(dǎo)航模塊就是比較好的選擇了!
GPS北斗衛(wèi)星+慣性組合導(dǎo)航模塊
近日,SKYLAB推出了最新的GPS/北斗/格洛納斯+慣性組合導(dǎo)航模塊SKG12UC,SKG12UC模組融合了北斗高精度衛(wèi)星定位和慣性導(dǎo)航技術(shù),為復(fù)雜的城市環(huán)境提供組合導(dǎo)航,適用于各種形態(tài)車(chē)載終端導(dǎo)航系統(tǒng),在高架遮擋、山間隧道、城市峽谷、地下停車(chē)場(chǎng)等弱(無(wú))衛(wèi)星信號(hào)覆蓋場(chǎng)景中,仍能通過(guò)慣性導(dǎo)航技術(shù)提供連續(xù)可靠的高精度定位導(dǎo)航體驗(yàn)。
同時(shí),SKG12UC集成了千尋立見(jiàn)FindNow,A-GNSS加速定位服務(wù),方便客戶在不同的應(yīng)用場(chǎng)景上使用。
GPS+慣性組合導(dǎo)航模塊的優(yōu)勢(shì)
衛(wèi)星+慣性組合導(dǎo)航充分利用慣性導(dǎo)航系統(tǒng)和衛(wèi)星導(dǎo)航系統(tǒng)優(yōu)點(diǎn),基于最優(yōu)估計(jì)算
法—卡爾曼濾波算法融合兩種導(dǎo)航算法,獲得最優(yōu)的導(dǎo)航結(jié)果;在衛(wèi)星信號(hào)微弱或者丟失衛(wèi)星信號(hào)的情況下,利用慣性導(dǎo)航系統(tǒng)使得導(dǎo)航系統(tǒng)繼續(xù)工作,保證導(dǎo)航系統(tǒng)的正常工作,
提高了系統(tǒng)的穩(wěn)定性和可靠性。
SKG12UC導(dǎo)航模塊提出了衛(wèi)星導(dǎo)航精度的智能識(shí)別算法,基于組合導(dǎo)航提供的高精度
導(dǎo)航信息,對(duì)衛(wèi)星導(dǎo)航的定位精度進(jìn)行識(shí)別,如果衛(wèi)星導(dǎo)航精度較好,則進(jìn)行組合導(dǎo)
航,一旦發(fā)現(xiàn)衛(wèi)星導(dǎo)航信號(hào)非常差甚至丟失信號(hào),則進(jìn)行純慣性導(dǎo)航,總之,SKG12UC導(dǎo)航模塊實(shí)現(xiàn)了組合導(dǎo)航和純慣性導(dǎo)航的自主切換。
SKG12UC的特征優(yōu)勢(shì):
(1)可發(fā)現(xiàn)并標(biāo)校慣導(dǎo)系統(tǒng)誤差, 提高導(dǎo)航精度。
(2)彌補(bǔ)衛(wèi)星導(dǎo)航的信號(hào)缺損問(wèn)題,提高導(dǎo)航能力。
(3)增加觀測(cè)冗余度,提高異常誤差的監(jiān)測(cè)能力,提高系統(tǒng)的容錯(cuò)功能。
(4)提高導(dǎo)航系統(tǒng)的抗干擾能力,提高完好性。
GPS+慣性組合導(dǎo)航模塊常見(jiàn)的5大應(yīng)用場(chǎng)景
(1)在高架橋下信號(hào)干擾較大時(shí);
(2)在穿山隧道中行駛的過(guò)程中,衛(wèi)星信號(hào)丟失時(shí);
(3)在地下停車(chē)場(chǎng),衛(wèi)星信號(hào)消失時(shí);
(4)在高樓大廈下;
(5)在濃密的樹(shù)蔭下,衛(wèi)星信號(hào)不好時(shí)。
-
慣性導(dǎo)航
+關(guān)注
關(guān)注
2文章
57瀏覽量
13507
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
PNT、GNSS與GPS:衛(wèi)星定位導(dǎo)航技術(shù)的清晰區(qū)分

北斗衛(wèi)星導(dǎo)航系統(tǒng)升級(jí)規(guī)劃發(fā)布
杭州中科微AT6558R北斗定位芯片 GPS雙模定位模塊芯片
GPS北斗衛(wèi)星時(shí)鐘服務(wù)器功能是什么?

【新品】精準(zhǔn)體驗(yàn)!GNSS多模衛(wèi)星定位模塊,GPS+北斗等多系統(tǒng)

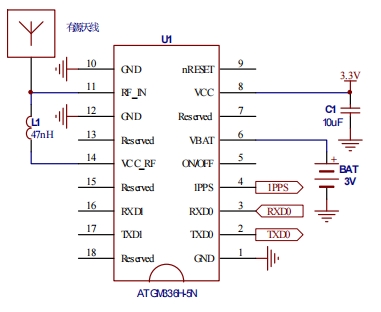
ATGM336H-5N杭州中科微BDS定位導(dǎo)航模塊規(guī)格參數(shù)
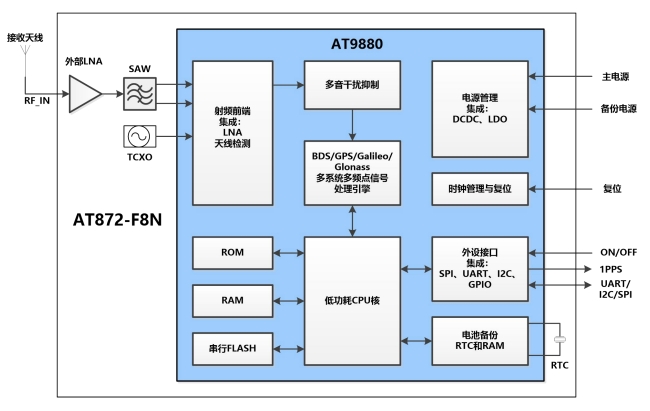
AT872-F8N高性能GNSS全模多頻定位導(dǎo)航模塊數(shù)據(jù)手冊(cè)
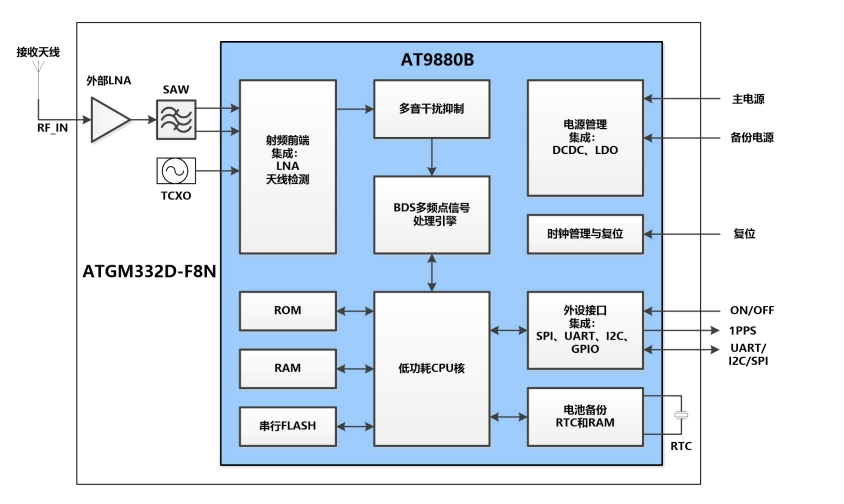
ATGM332D-F8N低功耗單北斗多頻定位導(dǎo)航模塊資料
FC1610AN時(shí)鐘晶振在北斗衛(wèi)星導(dǎo)航的應(yīng)用

GPS北斗雙系統(tǒng):衛(wèi)星時(shí)鐘同步 衛(wèi)星對(duì)時(shí)裝置-安徽京準(zhǔn)

同步時(shí)鐘:北斗/GPS衛(wèi)星、電信基站、NTP以太網(wǎng)校時(shí)方式的區(qū)別

AGV小車(chē)上的慣性導(dǎo)航模塊運(yùn)用——SGPM02

北斗衛(wèi)星通訊終端是什么?有什么功能?
愛(ài)普生高精度慣性導(dǎo)航模塊賦能無(wú)人割草機(jī)新賽道

同步時(shí)鐘:北斗/GPS衛(wèi)星、電信基站、NTP以太網(wǎng)等多種校時(shí)方式的區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論