") 分布式IPC工業(yè)配電測控的多任務(wù)調(diào)度管理系統(tǒng)的設(shè)計
分布式IPC工業(yè)配電測控的多任務(wù)調(diào)度管理系統(tǒng)的設(shè)計
引言
隨著科技的不斷發(fā)展,配電網(wǎng)絡(luò)自動化和工業(yè)測控技術(shù)也隨之發(fā)展迅猛,對系統(tǒng)的實時性、可靠性和多功能性要求也越來越高。而高校測控專業(yè)實驗設(shè)備模塊單一、功能簡單,遠(yuǎn)遠(yuǎn)落后于現(xiàn)代控制技術(shù)的發(fā)展。針對高校測控專業(yè)實際需求,研究和設(shè)計了一套分布式IPC工業(yè)配電測控系統(tǒng),由1臺上位機(jī)和8臺下位機(jī)構(gòu)成。各下位機(jī)能夠根據(jù)需要對多路模擬量、開關(guān)量進(jìn)行檢測和控制。上位機(jī)可以發(fā)出指令和任何一臺與之相連的下位機(jī)進(jìn)行通信,收集各下位機(jī)傳送來的模擬量和開關(guān)量信息,進(jìn)行相關(guān)的分析、匯總、報表生成等處理,并對各下位機(jī)子系統(tǒng)進(jìn)行監(jiān)控和宏觀調(diào)度。多任務(wù)調(diào)度管理是系統(tǒng)設(shè)計的重點和難點,本文將重點敘述其調(diào)度管理過程。
1 下位機(jī)系統(tǒng)功能概述
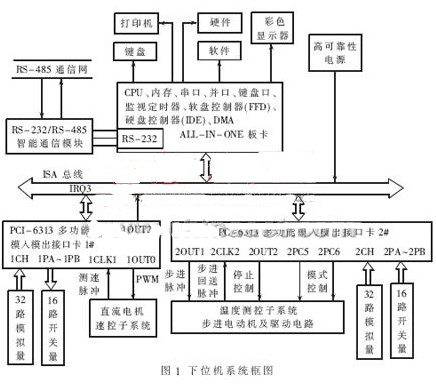
下位機(jī)主要模擬配電測控系統(tǒng)運行,可實現(xiàn)多路模擬量、開關(guān)量的采集、存儲、顯示以及與上位機(jī)的通信。同時,為了豐富以后實驗系統(tǒng)的教學(xué)和實驗內(nèi)容,還特意增加了2個具有典型代表性的工業(yè)控制環(huán)節(jié):直流電動機(jī)子系統(tǒng)的控制和模擬的溫度測控子系統(tǒng)。因此,下位機(jī)是一個較為復(fù)雜的測控子系統(tǒng),普通的單片機(jī)功能簡單,很難勝任,為此選用了控制功能強(qiáng)大的研華IPC-610工業(yè)控制計算機(jī),配裝了2塊PC-6313多功能模入/模出板卡。每塊PC-6313板卡有24路開入/開出、32路單端模擬量輸入/16路雙端輸入、3個定時器/計數(shù)器、2路模擬量輸出,結(jié)構(gòu)緊湊、功能齊全,性價比高,配接相應(yīng)的傳感器和執(zhí)行機(jī)構(gòu)即可完成所有的功能,下位機(jī)系統(tǒng)框圖如圖1所示。IPC-610底板可擴(kuò)展性強(qiáng),有近20個ISA插槽和PCI插槽,可隨時方便系統(tǒng)的升級。
工業(yè)測控系統(tǒng)最重要的是穩(wěn)定性,DOS系統(tǒng)比Windows系統(tǒng)穩(wěn)定性強(qiáng)且占用內(nèi)存小,非常適應(yīng)工業(yè)系統(tǒng)需要。為此,本系統(tǒng)采用DOS操作系統(tǒng),編程語言采用C語言。下位機(jī)模擬的是配電測控系統(tǒng)運行,有多道任務(wù)程序,同時要求運行速度快、穩(wěn)定性強(qiáng),是一個復(fù)雜的多任務(wù)實時系統(tǒng)。多任務(wù)實時調(diào)度過程的分析和設(shè)計是下位機(jī)系統(tǒng)運行的關(guān)鍵。
2 下位機(jī)系統(tǒng)實時多任務(wù)調(diào)度過程分析和設(shè)計
2.1 任務(wù)及其占用資源的關(guān)系
下位機(jī)配電測控系統(tǒng),共有19個任務(wù)程序和1個簡化的、初級的多任務(wù)實時操作系統(tǒng)MROS,構(gòu)成了一個多任務(wù)實時測控系統(tǒng)[4]。各個任務(wù)程序的名稱及其功能如下:
task_0 ( ):0點制表任務(wù)程序。
task_4 ( ):4點制表任務(wù)程序。
task_8 ( ):8點制表任務(wù)程序。
task_12 ( ):12點制表任務(wù)程序。
task_16 ( ):16點制表任務(wù)程序。
task_20 ( ):20點制表任務(wù)程序。
getad ( ):每2 s采集模擬量任務(wù)程序。
task_s ( ):每2 ms采集開關(guān)量任務(wù)程序。
stepping( ):每500 ms采集溫度測控子系統(tǒng)的溫度值,根據(jù)溫度偏差,控制步進(jìn)電動機(jī)正/反轉(zhuǎn)。
motor( ):每250 ms采集1次直流電動機(jī)的轉(zhuǎn)速,控制直流電動機(jī)按設(shè)定值運行。
pmotor( ):根據(jù)直流電動機(jī)的轉(zhuǎn)速,繪制直流電動機(jī)的動態(tài)運行曲線。
mnxs( ):在屏幕上排列顯示各個模擬量的當(dāng)前值。
kgxs( ):在屏幕上排列顯示各個開關(guān)量的當(dāng)前值。
Subdl( ):在屏幕上繪制工廠配電系統(tǒng)的電氣主接線圖。
Kg( ):把采集的開關(guān)量填入電站的電氣主接線圖中,完成開關(guān)量在圖中的動態(tài)顯示。
tad( ):把采集的模擬量填入電站的電氣主接線圖中,完成模擬量在圖中的動態(tài)顯示。
Stepmotor( ):步進(jìn)電動機(jī)升降速全過程控制,動態(tài)繪制升降速全過程。
Slaver( ):從機(jī)和主機(jī)的通信任務(wù)。將本機(jī)的64路模擬量和16路開關(guān)量以及溫度測控子系統(tǒng)的數(shù)據(jù)上傳給上位機(jī)進(jìn)行顯示。
Subtime( ):北京時間動態(tài)顯示。屏幕上各個畫面正上方中均有北京時間。
quit( ):退出運行處理,返回C集成開發(fā)環(huán)境。
19個任務(wù)要求占用硬件資源的關(guān)系十分復(fù)雜,表述如下:所有任務(wù)均要求占用CPU,而CPU只有1個;不同的任務(wù)要求占用不同的外設(shè)資源,多個任務(wù)可能要求占用同一外設(shè);各任務(wù)之間存在橫向聯(lián)系;多個任務(wù)在宏觀上的并發(fā)操作;多任務(wù)實時操作系統(tǒng)MROS的主要功能就是協(xié)調(diào)以上各種關(guān)系,有效地管理分配各種資源。
2.2 多任務(wù)實時操作系統(tǒng)的簡化
標(biāo)準(zhǔn)的MROS一般包括CPU管理、外設(shè)管理、中斷管理、存儲器管理和文件管理等,占用內(nèi)存空間較大,CPU的運行速度較慢。下位機(jī)測控系統(tǒng)具有如下特點:
(1)對各量的監(jiān)測和控制,實際上是周期性地重復(fù)執(zhí)行各任務(wù)程序。
(2)人機(jī)聯(lián)系任務(wù)雖然是隨機(jī)的,但任務(wù)的內(nèi)容是固定的,操作人員只是通過鍵盤調(diào)用一些編制就緒的程序而不修改程序本身。
(3)監(jiān)測對象固定,主機(jī)和外設(shè)規(guī)模也是固定不變的。
對于這樣一個系統(tǒng),若采用標(biāo)準(zhǔn)的MROS,將占用較多內(nèi)存空間和CPU的運行時間,降低系統(tǒng)資源的利用率和系統(tǒng)的實時性。因此,本系統(tǒng)采用了一種與硬件資源和測控對象相適應(yīng)的簡化的、初級的MROS,保留了標(biāo)準(zhǔn)MROS的核心功能。即CPU管理、外設(shè)管理和中斷管理,其主要工作如下:
(1)任務(wù)調(diào)度
任務(wù)調(diào)度的主要職能,一是根據(jù)任務(wù)調(diào)度算法分配CPU,即實現(xiàn)某個時間或事件驅(qū)動的任務(wù)切換;二是從任務(wù)收回CPU。
按照任務(wù)的優(yōu)先級是否可以動態(tài)地改變,調(diào)度算法可以分為:靜態(tài)調(diào)度和動態(tài)調(diào)度。
按照調(diào)度過程是否允許采用搶先方式,調(diào)度算法可以分為:搶先調(diào)度方式和非搶先調(diào)度方式。非搶先調(diào)度方式在滿足高優(yōu)先級別任務(wù)的時限方面比搶先調(diào)度方式要差一些,但是它實現(xiàn)起來簡單,時間確定性好,并且避免了因為資源共享而引起的互斥,實際應(yīng)用較廣。
本系統(tǒng)設(shè)計時,按照多任務(wù)實時操作的基本原則來編寫任務(wù)程序,通過硬件配合,可使每個任務(wù)都在幾十個微秒內(nèi)完成。因此,可采用靜態(tài)調(diào)度方式設(shè)計圖1所示的IPC系統(tǒng)。但某些任務(wù)的優(yōu)先級別可以局部改變;若采用非搶先調(diào)度方式,可把1個功能分解為若干個可以在1 μs到幾十微秒內(nèi)完成的程序段,以改善實時性。
(2)進(jìn)程控制
為了描述和控制進(jìn)程的運行,系統(tǒng)為每個進(jìn)程定義了一個數(shù)據(jù)結(jié)構(gòu)——進(jìn)程控制塊(PCB)。PCB主要包括:進(jìn)程標(biāo)識符、進(jìn)程當(dāng)前狀態(tài)、進(jìn)程隊列指針、程序開始地址、進(jìn)程優(yōu)先級、CPU現(xiàn)場保護(hù)區(qū)、通信信息、家族聯(lián)系、占有資源清單等。
為了簡化問題,本系統(tǒng)按一定的原則編制每一個任務(wù)程序,使得每一個任務(wù)程序都在規(guī)定的時間內(nèi)執(zhí)行完畢,即每一個任務(wù)程序在執(zhí)行完后才交還CPU的使用權(quán),因此,在本系統(tǒng)所設(shè)計的MROS中,就只使用PCB中的“進(jìn)程當(dāng)前狀態(tài)”這一個概念。
(3) “tick”信號
“tick”信號是MROS在運行過程中需要的基本的、最小的定時單位。在圖1所示的系統(tǒng)中,“tick”由PC-6313板卡的定時/計數(shù)器8253產(chǎn)生。當(dāng)系統(tǒng)初始化時,使PC-6313 1#板卡8253的 T2 OUT2每1 ms輸出1個脈沖,把這個脈沖信號作為中斷請求信號加在IRQ3上,每1次中斷即產(chǎn)生1個“tick”,在IRQ3的中斷服務(wù)程序進(jìn)行與時間相關(guān)的操作。
2.3 多任務(wù)實時調(diào)度系統(tǒng)的設(shè)計原則
在單CPU系統(tǒng)中,不可能有真正意義上的并行操作,所有任務(wù)只能遵循調(diào)度策略,串行地占用CPU,即:宏觀上在同一時段內(nèi)多個程序的同時執(zhí)行,而微觀上則是多個任務(wù)的交替執(zhí)行。整個測控系統(tǒng)必須遵循的設(shè)計原則如下:
(1)快速的任務(wù)調(diào)度和切換。調(diào)度程序本身必須是低開銷,本系統(tǒng)編寫的實時調(diào)度程序,占用CPU的執(zhí)行時間小于1μs。調(diào)度所需的“tick”是通過定時器/計數(shù)器模板上的8253產(chǎn)生的,可以根據(jù)需求確定調(diào)度精度,從幾百微秒到若干毫秒。
(2)在設(shè)計測控電路和編制各個實時任務(wù)程序時,應(yīng)注意任何任務(wù)都不能加重CPU的負(fù)擔(dān),它只能在接收控制信號和調(diào)節(jié)命令后,就脫離CPU的“關(guān)注”而獨立運行,直到新的控制信號和調(diào)節(jié)命令到來后又在新的條件下“獨立”運行。
2.4 多任務(wù)實時調(diào)度的過程分析
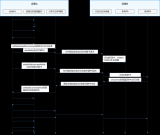
圖2是任務(wù)調(diào)度的過程示意圖。

圖2任務(wù)調(diào)度說明如下:
(1) 實時時鐘在0點、4點、8點、12點、16點和20點時,分別把task_0( )、task_4( )、task_8( )、task_12( )、task_16( )和task_20( )推入就緒隊列。
(2) 實時時鐘每隔5 ms、500 ms、2 s,分別把task_s( )、stepping( )、getad( )推入就緒隊列。
(3) a鍵、s鍵、b鍵、q鍵,分別把mnxs( )、kgxs( )、stepmoter( )、quit( )推入就緒隊列。
(4) m鍵把允許標(biāo)志pmotorf1置1,在motor( )任務(wù)執(zhí)行過程中,如果發(fā)現(xiàn)pmotorf1=1,就把pmotor( )推入隊列。
(5) t鍵和d鍵均把subd1( )推入就緒隊列。在subd1( )的執(zhí)行過程中,如果發(fā)現(xiàn)是t鍵,則把kg( )推入就緒隊列;如果發(fā)現(xiàn)是d鍵,則把tad( )推入就緒隊列。
(6) kg( )、tad( )、mnxs( )、kgxs( )在各自運行過程中,又把自己推入就緒隊列,CPU不斷對它們提供運行機(jī)會,在沒有其他按鍵操作的情況下,pmotorf1總是等于1,即一直允許繪制直流電動機(jī)運行曲線,每250 ms運行motor( )時,pmotor( )都可以被設(shè)置為就緒狀態(tài)。pmotor( )每運行1次,就在屏幕上顯示1次直流電動機(jī)的當(dāng)前速度值。
(7) 下位機(jī)串行口中斷一直處于開放狀態(tài),若主機(jī)要求和該下位機(jī)通信,則把slaver( )推入就緒狀態(tài)。Slaver( )運行時,將指定的數(shù)據(jù)傳送給上位機(jī)。由于采用智能通信模塊,下位機(jī)只需把指定的數(shù)據(jù)傳送給智能通信模塊即可,其后,由通信模塊將數(shù)據(jù)傳送給主機(jī)。串行通信的速度很快,可滿足系統(tǒng)實時性的要求。
3 下位機(jī)軟件系統(tǒng)設(shè)計流程
下位機(jī)軟件系統(tǒng)結(jié)構(gòu)示意圖如圖3所示。軟件系統(tǒng)由三大塊子系統(tǒng)構(gòu)成:圖3(a)為初始化及任務(wù)調(diào)度,是系統(tǒng)的管理層負(fù)責(zé)任務(wù)調(diào)度;圖3(b)為任務(wù)程序集合,它們在管理層的調(diào)度下實現(xiàn)各種功能;圖3(c)為中斷服務(wù)程序,是簡化MROS的組成部分。可以據(jù)此畫出更詳細(xì)的軟件系統(tǒng)流程圖并編寫相應(yīng)的程序。
結(jié)論
本文對目前高校測控實驗儀功能單一,對測控系統(tǒng)的可靠性、實時性等不能很好地模擬等問題,研究和設(shè)計了一套配電測控模擬實驗臺,由上下位機(jī)系統(tǒng)構(gòu)成。下位機(jī)以工控機(jī)為核心,配裝簡化的多任務(wù)實時操作系統(tǒng),能夠?qū)?6路開關(guān)量、64路模擬量及多個鍵盤任務(wù)進(jìn)行實時檢測和控制,并能夠和上位機(jī)進(jìn)行定時通信,將收集數(shù)據(jù)及時傳送給上位機(jī),進(jìn)行匯總、分析和報表打印等。重點分析了下位機(jī)的實時多任務(wù)之間的關(guān)系,調(diào)度過程原理及簡化的多任務(wù)實時操作系統(tǒng)的設(shè)計。
-
單片機(jī)
+關(guān)注
關(guān)注
6042文章
44617瀏覽量
637534 -
cpu
+關(guān)注
關(guān)注
68文章
10901瀏覽量
212664 -
自動化
+關(guān)注
關(guān)注
29文章
5620瀏覽量
79529
發(fā)布評論請先 登錄
相關(guān)推薦
分布式軟件系統(tǒng)
HarmonyOS應(yīng)用開發(fā)-分布式任務(wù)調(diào)度
請問怎么設(shè)計一種分布式無線測控系統(tǒng)?
【木棉花】:簡單的分布式任務(wù)調(diào)度
【學(xué)習(xí)打卡】OpenHarmony的分布式任務(wù)調(diào)度
基于Multi-Agent的分布式測控系統(tǒng)任務(wù)調(diào)度算法
基于多Agent 技術(shù)的分布式測控系統(tǒng)研究
三層分布式計算網(wǎng)格任務(wù)調(diào)度系統(tǒng)

CAN總線實現(xiàn)工業(yè)網(wǎng)絡(luò)分布式測控系統(tǒng)
分布式調(diào)度子系統(tǒng)--初步研究

鴻蒙分布式任務(wù)調(diào)度技術(shù)教程





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論