 通過采用Atmega128控制芯片實現電動執行器的設計
通過采用Atmega128控制芯片實現電動執行器的設計
1.引言
1.1 電動執行器的發展
電動執行器,又稱電動執行機構、電裝、電動頭,是一種自動控制領域的常用機電一體化設備,是自動化儀表終端三大組成部分(檢測設備、調節設備和執行設備)中的執行設備,主要作用是對一些閥門、擋板等設備進行自動操作,控制其開關和調節,代替人工作業。
1.2 研究背景及意義
我國目前的電動執行器還以角行程、直行程和多轉式這些傳統的電動執行器為主,現有的執行器在使用時還會遇見各式各樣的問題,需要專業的技術員去鉆研改進,與國際水平相比還存在結構上簡單,功能弱、智能化程度低等缺點。目前上海沃電、溫州瑞基、溫州澳托克、英國rotork等產品在市場上均有很強的影響力,但市場上銷售的基本型電動執行器功能單一,而功能強大的執行器價格又很高,基于以上原因,本文討論設計一臺性價比高的智能電動執行器。
1.3 系統功能描述
本設計力求執行器在功能上齊全,在性能上穩定,在價格上便宜。
執行器具體功能:
(1)本地操作:本地點動操作;本地保持操作。
(2)遠方操作:遠方手動操作;遠方自動操作。
(3)液晶界面顯示:開度顯示;狀態顯示;報警顯示;菜單顯示。
(4)數據保存:將用戶設置后的數據存入單片機的EEPROM。
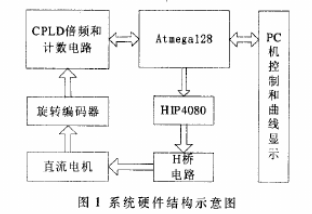
1.4 系統框圖
系統總體框圖如圖1所示。

2.系統硬件電路設計
2.1 系統電源電路設計
本系統需要的電源主要有三種:
(2)+12V_D:用于換相繼電器
(3)+12V_A:用于4-20mA電流產生
要將380V交流電變為直流首先要變壓、整流、穩壓,所以電源部分就會包括變壓器、整流電路、穩壓電路這三個部分。
整流電路:可采取最通用最可靠的橋式整流。
2.2 380V電源鑒相電路設計
鑒相電路目的是想判別輸入信號的相位差,將相位差轉換成不同的信號以便后級使用。根據這一原則,首先輸入信號要為方波,而本設計使用的380V正弦信號,所以第一步要做的就是將正弦信號轉為方波。由于系統控制器采用的是單片機,其供電為5V直流信號,需要鑒相的信號是380V高壓信號,為了避免在控制的時候收到高壓信號的干擾,在電路設計時還要考慮前后級之間的隔離。在鑒別相序的時候采取軟件來進行相序分析。本設計采用Atmega128單片機作為處理器,資源富裕完全有空間來完成鑒相功能,而且采取軟件處理可以減少硬件電路的設計調試,也可減小最后PCB的面積。
鑒相前級采樣電路由兩部分組成:正弦信號變換為方波,電源隔離。
2.3 紅外遙控發射電路設計
通用紅外遙控系統由發射和接收兩大部分組成。發射部分包括鍵盤、編碼調制、LED紅外發送器;接收部分包括LED紅外接收器、光電放大器、解調和解碼電路。
紅外遙控系統框圖如圖2所示。

2.4 交流電機控制電路設計
繼電器驅動電路:
繼電器驅動電路采取互鎖的形式,防止電路在換相的時候出現短路的狀況。繼電器線圈上要加蓄流二極管,否則線圈中的電不能及時的放干凈,在切換相序的時候也容易短路。二極管要選取開關速度快的肖特基二極管。繼電器選型只要滿足耐壓和蓄流能力就可以了。

2.5 顯示電路設計
液晶顯示采用O12864SGD14CFNE型號,此種液晶體積小,但也是128X64個顯示點,并且功耗低、驅動簡單。
2.6 4-20mA電流產生電路設計
目前最普遍使用的電流產生原理是電壓/電流轉換即V/I轉換,將輸入的電壓信號轉換為具有一定關系的電流信號,通過轉換的電流相當于一個輸出可調的恒流源,其輸出電流應能夠保持穩定而不會隨負載的變化而變化。
針對本設計來說使用PWM占空比來控制4-20mA電流輸出,而且也減少了外圍電路的設計,增強了系統的穩定性。
2.7 保護電路設計
鑒于電源電路存在一些不穩定因素,用來防止此類不穩定因素影響電路效果的回路稱作保護電路。比如有過流保護、過壓保護、過熱保護、空載保護、短路保護等。
電機過流檢測設計采用電流互感器來檢測電流過載。在供電用電的線路中電流電壓相差懸殊。線路上的電壓都比較高如直接測量是非常危險的。電流互感器的作用就是變流和電氣隔離。電流互感器原理其實就是電磁感應原理。
本電路使用的是380V交流電,所以用電流互感器來檢測較為安全,經過電流互感器將大電流變為小電流然后在變換為電壓,再送入單片機處理。
3.系統軟件的設計
3.1 系統總體流程圖
系統總體流程圖如圖4所示。
3.2 鑒相處理及電機控制
鑒相采集的原理其實很簡單,380V交流電已由外部硬件電路轉換為方波,單片機只需處理輸入兩路信號超前與滯后的關系就可以了,這里使用外部中斷來捕捉外部輸入的方波的信號。[page]
電機控制包括正轉、反轉和停止,這里就需要換相和電源通電控制。
注意:一定要先進行換相然后再對電機通電,否則在電機動作的時候進行換相會發生短路的情況。

3.3 反饋及遠程信號處理
反饋信號主要是檢測電動執行器當前的運行狀態,其中包括閥門開度反饋、開關到位、過力矩檢測、過電流和過熱反饋。
過流檢測:通過互感器將電流變換為電壓然后通過A/D轉換后進行處理。
過熱檢測:通過熱敏電阻檢測,反饋回開關量。
過力矩檢測:通過外部限位開關讀取閥門過力矩信號,返回開關量。
開度采集:開度通過于轉動閥門連接的電位器反饋信號,由A/D轉換后送入單片機進行處理。
3.4 按鍵及紅外遙控器信號處理
按鍵主要是用于執行器本地操作和遠程切換操作,安裝在執行器的外殼上,主要實現本地點動和本地保持動作。
此處要注意的是按鍵消抖采用定時器延時來做,不要使用等待延時,可以提高單片機的運行速度。
紅外遙控器接收管連接到單片機的外部中斷,當有信號的時候進入中斷處理,可以提高遙控器的執行效率,處理的方法是將發送部分信號進行解碼,軟件處理是將發送的碼字破譯成二進制的0和1,由0和1組合成不同的字節即可破解遙控器按鍵。
3.5 液晶顯示驅動軟件設計
液晶顯示部分顯示的內容主要有三種,第一種是開度顯示,第二種是電動執行器狀態顯示,第三種的設置菜單顯示。
液晶驅動程序的液晶顯示部分的基礎,我們使用的液晶是不帶字庫的液晶,所以在使用的時候需要把要顯示的字用取模軟件轉換成字模。液晶驅動采用串行數據模式,這樣可以減少外部管腳的占用。
責任編輯:gt
-
芯片
+關注
關注
456文章
51154瀏覽量
426253 -
繼電器
+關注
關注
132文章
5361瀏覽量
149415 -
單片機
+關注
關注
6042文章
44617瀏覽量
637566
發布評論請先 登錄
相關推薦
ATmega128系統模塊,設計一個數控雕刻機系統

ATMEGA128和ATMEGA128A 區別??
基于Atmega128嵌入式控制器該怎么設計?
基于Atmega128嵌入式控制器該怎么設計?
atmega128中文資料pdf
atmega128 pdf
基于ATmega128的泥漿壓力脈沖信號仿真器
采用ATMEGA128單片機結合CPLD 實現了對VGA顯示
基于Atmega128單片機設計的嵌入式控制器

ATmega128單片機的內部資源、工作原理和硬件電路設計的資料免費下載

采用Atmega128單片機和電機控制芯片實現直流電機高精度控制






 工商網監
工商網監
評論