") 采用S3C44B0芯片實現(xiàn)基于步進電機控制的微波頻率自動測量系統(tǒng)設計
采用S3C44B0芯片實現(xiàn)基于步進電機控制的微波頻率自動測量系統(tǒng)設計
1.引言
通常微波所指的是分米波、厘米波和毫米波。關于其頻率范圍,一種說法是:
300MHz ~ 300GHz(1MHz =106Hz,1GHz =109 )相應的自由空間中的波長約為1m~1mm.
微波技術的興起和蓬勃發(fā)展,使得國內大多數(shù)高校都開設微波技術課程。但還存在以下問題:測量時,由手工逐點移動探頭并記錄各點讀數(shù),然后手工計算實驗結果并繪圖。測量項目單一、精度低、測量周期長,操作也較為繁瑣。本文主要研究一種實用的基于Labview的速調管微波頻率自動測量系統(tǒng)。
2.系統(tǒng)整體結構
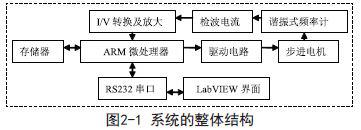
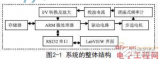
系統(tǒng)的整體結構如圖2-1所示。由下位機跟上位機構成。微處理器通過驅動電路來控制步進電機,帶動諧振式頻率計的套筒轉動,處理器采樣檢波電流,傳送到上位機LabVIEW界面顯示,并利用PC機強大的數(shù)據(jù)處理功能,分析出電流最小值,計算出所測頻率。
3.系統(tǒng)硬件設計
3.1 微處理器系統(tǒng)電路的設計
本系統(tǒng)選用的微處理器是S3C44B0.2.5VARM7TDMI內核,3.0~3.6V的I/O操作電壓范圍。可通過PLL鎖相環(huán)倍頻高至66MHz;71個通用I/O口;內嵌有8通道10位ADC,本系統(tǒng)選取了通道1作為晶體檢波器電流輸入通道。
3.2 復位電路
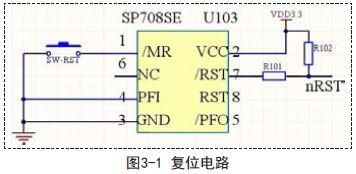
系統(tǒng)沒有采用RC電路作為復位電路,而使用了電壓監(jiān)控芯片SP708SE,提高了系統(tǒng)的可靠性。復位電路的RST 端連接到S3C44B0的復位引腳nRESET,因為S3C44B0的復位信號是低電平有效,所以當系統(tǒng)掉電或復位按鍵SW_RST被按下時,電源監(jiān)控芯片RST 引腳立即輸出復位信號,使S3C44B0芯片復位。
3.3 諧振式頻率計自動測量電路的設計
3.3.1 定標法測頻率原理
為了實現(xiàn)頻率的自動化測量,本系統(tǒng)采用步進電機帶動頻率計的轉動,當腔體轉到了諧振位置時候,到達檢波器的微波功率明顯下降,檢波電流出現(xiàn)明顯的下降,而這個位置對應的頻率就是所測頻率。步進電機帶動下的是非只讀式頻率計,所以先要用定標的方法,擬合出頻率與刻度的對應關系式。定標法:同時配合兩種頻率計,一種是只讀式的,可直接讀出頻率;另一種是非只讀式的,只有刻度,不能直接讀出頻率。首先手動轉動非只讀式頻率計到一個諧振的位置,記錄這時的刻度,然后再轉動只讀式頻率計,到另外一個諧振位置,記錄對應的頻率。重復這種操作,測出盡量多的頻率和刻度對應點,根據(jù)測得數(shù)據(jù)再用最小二乘法擬合出兩者的對應關系式。最后改換用步進電機帶動非只讀式頻率計轉動,當轉動到檢波電流出現(xiàn)明顯的“吸收谷”時,讀得這時的刻度,根據(jù)擬合出來的刻度與頻率關系式,就可得所測頻率。
3.3.2 步進電機及自動控制電路
步進電機是一種將電脈沖轉化為角位移的執(zhí)行機構。通俗一點講:當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度。可以通過控制脈沖個數(shù)來控制角位移量,從而達到準確定位的目的;同時可通過控制脈沖頻率來控制電機轉動的速度,達到調速的目的。
本系統(tǒng)采用二相步進電機,具有如下一些特點:只需將電機與驅動器接線的A+和A-(或者B+和B-)對調即可實現(xiàn)電機的轉動方向;步進角為1.8°的兩相四線混合式步進電機,并把細分驅動器的細分數(shù)設置為8,電機的運轉分辨率為每個脈沖0.225°。為了有效驅動電機,本文采用了基于TA8435H芯片的驅動電路。實際應用電路如下圖3-2所示,芯片的輸入信號有使能控制、正反轉控制和時鐘輸入。
通過光耦器件TLP521可將驅動芯片跟輸入級進行電隔離,起到邏輯電平隔離和保護作用。
M1,M2分別接高電平,所以為1/8細分方式。
由于REF IN引腳接高電平,因此VNF為0.8V.
輸出級斬波電流為VNF/RNF=0.8/0.8=1A,因此R212、R213要選用功率大一些的電阻。選用不同的二相步進電機時,應根據(jù)其電流大小選擇合適的R212和R213.R21和C5組成復位電路,D1~D4快恢復二極管可用來泄放繞組電流。
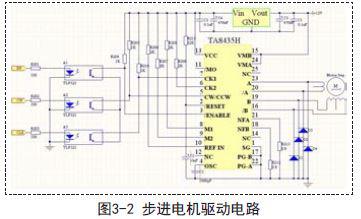
電路中用到微處理器S3C44B0引腳PC0,PC1,PC2給驅動電路分別輸出使能,正反轉,時鐘信號,通過控制輸出脈沖的間隔可以控制電機轉動的速率,而輸出脈沖個數(shù)可控制步進電機走動的步數(shù),達到控制頻率計腔體位置目的。電路輸出端口A, A, B, B接二相步進電機對應輸入端子。
3.3.3 檢波電流I/V轉換及放大電路
檢波晶體的作用是將微波微弱信號轉換成直流信號。故可觀察檢波電流是否出現(xiàn)“吸收波谷”來判斷腔體是否到達諧振位置。本系統(tǒng)將檢波電流經(jīng)過處理之后傳送到上位機的LabVIEW界面顯示,觀察是否到諧振位置。
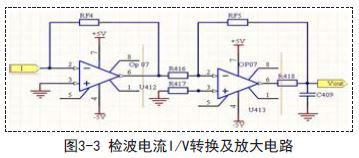
由于微波信號在傳輸過程中受到外部干擾的噪聲,線路的噪聲,元器件的噪聲等等,因此需要濾波電路來濾除這些干擾信號。由于處理器對信號的采集速率比較低,所以本系統(tǒng)采用了時間常數(shù)比較大的由R418和C409構成的低通濾波器。其截止頻率為f p =30Hz有利于濾除電路中的尖峰噪聲。電路采用兩級運放,第一級為I/V轉換,第二級為電壓反相放大。調節(jié)可變衰減器,電機走完全程,觀察到檢波電流最大值為50.9μ A,因此電路中RF4=1K,R416=1K,RF5=45K,由Vout1=-RF4*I知,經(jīng)過第一級I/V轉換之后最大電壓為50.9mV,再經(jīng)過放大,最終輸出電壓最大為2.291V,滿足S3C44B0的A/D轉換輸入要求。
4.軟件設計
4.1 下位機軟件
系統(tǒng)開機復位后,進入while(1)死循環(huán),時刻檢測上位機是否發(fā)來測量頻率的命令,當接受到測量頻率命令后,調用測頻率模塊子程序。頻率測量子程序中,電機走完全程需要1854步,每一步帶動諧振腔走0.005mm,每一步耗時44.44ms,電機每走動一步,把100次檢波電流的A/D轉換數(shù)據(jù)求平均值后再通過串口發(fā)送到上位機顯示。
4.2 上位機軟件設計
在虛擬儀器開發(fā)平臺LabVIEW中,可以利用基于VISA的儀器驅動模板中的I/O接口函數(shù)來方便快速地開發(fā)驅動程序。本系統(tǒng)中通過PC機和主控芯片S3C44BO的RS232串行通信實現(xiàn)數(shù)據(jù)采集的驅動程序正是使用這種方法。
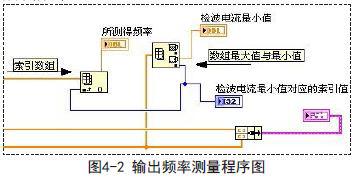
如圖3-5頻率測量的labview程序圖。首先用最大值與最小值函數(shù)求出采集到的電流數(shù)據(jù)的最小值,并求出其對應的索引值,即步進電機在哪一步采集到的電流值,從而把這個索引值反饋回頻率數(shù)組,求出其對應的元素,則為所測頻率。
5.信號源輸出頻率測量實驗結果及分析
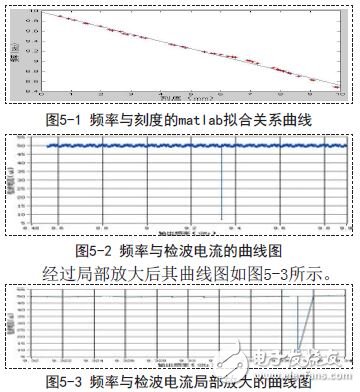
為了在上位機的LabVIEW界面得到所測量的微波信號頻率,需在界面中顯示出檢波電流--頻率曲線,從而可明顯讀出檢波電流的“吸收波谷點”.需通過定標法先手工測量頻率--距離(當前測量點與起始點的距離,可由套筒刻度算出)的一組盡可能多的數(shù)據(jù)點,然后利用步進電機每走一步的距離,就可以把距離轉化為步數(shù),再用matlab擬合出頻率--步數(shù)的關系函數(shù)。從而可知道步進電機走到哪一步對應哪一個頻率。電機走完全程需要1854步,那么把步數(shù)對應的1854個頻率值組成一個數(shù)組作為曲線的橫坐標,并把采集到的1854個電流值作為縱坐標。
限于本信號源頻率及諧振式頻率計測量范圍的影響,本系統(tǒng)只能在8.48GHz和9.9GHz范圍內測量。因此從套筒的起始位置9.9mm(對應于頻率8 . 4 8 G H z ),截止位置0 . 6 3 m m (對應于頻率9.9GHz),其全長為9.9mm-0.63mm=9.27mm.由于電機帶動套筒每步的距離非常小,因此不能直接測量步進電機一步的距離,利用步進電機沒有累計誤差的特點,采用步進電機走動180步,測出套筒刻度前后位置差,得出步進電機帶動套筒每一步移動平均距離為0.005mm.手工測出頻率與刻度的42組數(shù)據(jù)點,利用MATLAB擬合出圖5-1所示曲線。用MATLAB擬合出頻率f 與刻度L 線性關系函數(shù)為f = ?0.1456* L + 9.9917(0.63mm ≤ L ≤ 9.9mm)。由于電機每步帶動套筒移動0.005mm,起始位置在0.63mm,即步進電機走一步后,套筒的位置在0.63mm+0.005mm=0.635mm,而步進電機走完全程需要1854步,套筒的截止位置在0.63+0.005*1854=9.9mm.則刻度L 與步數(shù)n 的關系函數(shù)為L = 0.005n + 0.63(0 ≤ n ≤1854)。
可推導出頻率f 與步數(shù)n的函數(shù)關系式為f = ?0.000728n + 9.9(0 ≤ n ≤1854)。把步數(shù)對應的1854個頻率值組成一個數(shù)組作為曲線的橫坐標,并把采集到的1854個電流值作為縱坐標,利用PC機在LabVIEW描繪的波形圖如圖5-2所示。
再由LabVIEW自動計算檢波電流最小值對應的頻率值,如圖5-4所示。可知這時信號源輸出頻率為9.337GHz.

與手工測量做對比。換上可直接測出頻率的諧振式頻率計,測得這時的頻率為9.357GHz,所以自動測量與手動測量的相對誤差為:

本系統(tǒng)設定步進電機走完全程需要82.4秒,不能設得走太快的原因是防止步進電機“丟步”(漏掉了脈沖沒有運動到指定的位置)。另外太快很可能檢測不到檢波電流的“波谷點”.而手工測量一次信號源的輸出頻率,通常要兩分多鐘,可見本系統(tǒng)自動測量的實用性。
-
芯片
+關注
關注
456文章
50965瀏覽量
424862 -
測量系統(tǒng)
+關注
關注
2文章
539瀏覽量
41434 -
步進電機
+關注
關注
150文章
3114瀏覽量
147612
發(fā)布評論請先 登錄
相關推薦
跪求S3c44b0 u***驅動
基于S3C44B0和μCOS-II 的CAN節(jié)點的設計
基于S3C44B0的U-Boot啟動分析和移植實現(xiàn)
S3C44B0中文手冊,S3C44B0中文資料
為何選用SAMSUNG S3C44B0進行開發(fā)
基于S3C44B0的串口服務器系統(tǒng)的設計

S3C44B0的初始化程序的理解
基于S3C44B0開發(fā)板的圖像采集方法研究

基于ARM的步進電機控制的微波頻率自動測量系統(tǒng)的設計
串口服務器系統(tǒng)中S3C44B0的應用設計
基于S3C44B0開發(fā)板進行Blob的移植操作和步驟
基于S3C44B0的LCD控制及觸摸屏接口設計






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論