") 采用PID控制器實現(xiàn)四旋翼無人機的四元數(shù)控制律設計
采用PID控制器實現(xiàn)四旋翼無人機的四元數(shù)控制律設計
四旋翼無人機是一種具有4個旋翼的飛行器,有X型分布和十字型分布2種。文中采用的是X型分布的四旋翼,四旋翼無人機只能通過改變旋翼的轉(zhuǎn)速來實現(xiàn)各種運動。國外對四旋翼無人直升機的研究非常活躍。加拿大雷克海德大學的Tavebi和McGilvrav證明了使用四旋翼設計可以實現(xiàn)穩(wěn)定的飛行。澳大利亞臥龍崗大學的McKerrow對Dragantlyer進行了精確的建模。目前國外四旋翼無人直升機的研究工作主要集中在以下3個方面:基于慣導的自主飛行、基于視覺的自主飛行和自主飛行器系統(tǒng)。而國內(nèi)對四旋翼的研究主要有:西北工業(yè)大學、國防科技大學、南京航天航空大學、中國空空導彈研究院第27所、吉林大學、北京科技大學和哈工大等。大多數(shù)的研究方式是理論分析和計算機仿真,提出了很多控制算法。例如,針對無人機模型的不確定性和非線性設計的DI/QFT(動態(tài)逆/定量反饋理論)控制器,國防科技大學提出的自抗擾控制器可以對小型四旋翼直升機實現(xiàn)姿態(tài)增穩(wěn)控制,還有一些經(jīng)典的方法比如PID控制等,但是都不能很好地控制四旋翼速度較大的情況。本文對四旋翼無人機設計了另外一種不同的控制方法即四旋翼的四元數(shù)控制律設計,仿真結(jié)果表明這種控制方法是一種有效的方法。尤其是對飛機的飛行速度較大的情況,其能穩(wěn)定地控制四旋翼達到預期的效果。
1、 四旋翼的模型
文中所研究的四旋翼結(jié)構(gòu)屬于X型分布,即螺旋槳M1和M4與M2和M3關于X軸對稱,螺旋槳M1和M2與M3和M4關于Y軸對稱,如圖1所示。對于四旋翼的模型本文主要根據(jù)四旋翼的物理機理進行物理建模,并做以下2條假設。

1)四旋翼無人機是絕對的剛體,不考慮其結(jié)構(gòu)和彈性形變,而且機體的重心位置不變,其質(zhì)量為常數(shù);
2)假設地面為慣性參考系,即假設地面坐標系為慣性坐標系。
利用電子秤測出各個零部件的質(zhì)量,利用游標卡尺和直尺測出各個零部件的尺寸,應用懸吊法測出其機體的重心。立機體坐標系并求出四旋翼的轉(zhuǎn)動慣量,對于不規(guī)則的物體進行必要的簡化和等效,對于螺旋槳的建模忽略了其所受的空氣阻力和側(cè)向力矩,只考慮螺旋槳的升力和扭矩。
1.1 四旋翼動力學方程
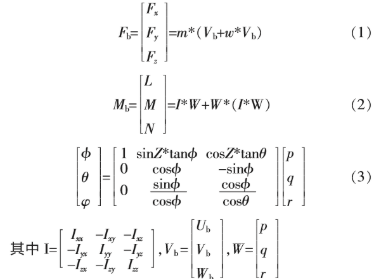
在機體坐標系下的受力與力矩關系式:
1.2 四旋翼無人機動力系統(tǒng)建模
1.2.1 電機動力學模型
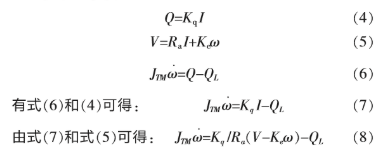
其中,JTM為電機的轉(zhuǎn)動慣量,QL為負載扭矩,Q是電機扭矩.V是電機兩端電壓,I是電機通過的電流,ω是電機轉(zhuǎn)動角速率,Kq,Ra和Ke是電機的特定常數(shù),Kq將電流和扭矩關聯(lián),Ra是電機轉(zhuǎn)子的總阻抗,Ke將電機轉(zhuǎn)速關聯(lián)到電動勢。
1.2.2 螺旋槳的模型
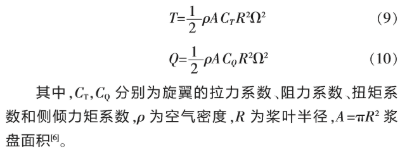
文中只考慮螺旋槳沿構(gòu)造旋轉(zhuǎn)軸的升力T和扭矩Q,忽略其受到的阻力和側(cè)向力矩。這些力或力矩均與旋翼轉(zhuǎn)速的平方(Ω2)成一定比例關系
2、 四旋翼無人機PID控制律設計
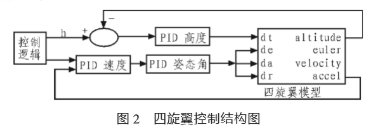
2.1 四旋翼無人機PID控制結(jié)構(gòu)
文中的主要目的是基于PID的四旋翼控制問題研究,其最終目標是要驗證PID能有效的控制四旋翼在沒有重心偏移和有重心偏移下情況下的姿態(tài)角和速度。故而首先要對所用的四旋翼飛機進行建模,然后進行控制器的設計,最后進行仿真驗證。
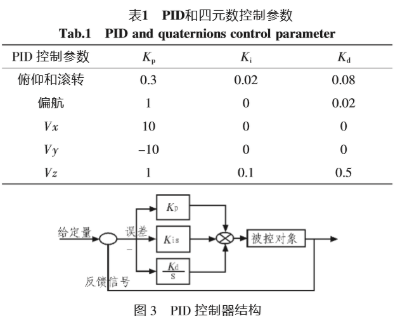
2.2 四旋翼無人機PID控制參數(shù)和PID控制器結(jié)構(gòu)圖
3、 實驗結(jié)果與分析
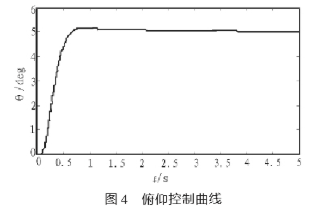
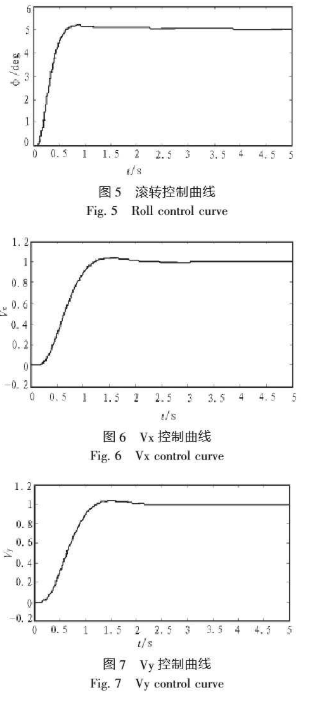
3.1 在沒有重心偏移情況下的控制結(jié)果
在沒有重心偏移情況下俯仰角和滾轉(zhuǎn)一起控制5度的結(jié)果表明pid能有效的控制控制量在很快的時間內(nèi)達到預期的效果。
在姿態(tài)角控制基礎上近一步加入速度控制,而且速度控制只是簡單的比例控制,實驗結(jié)果很好。
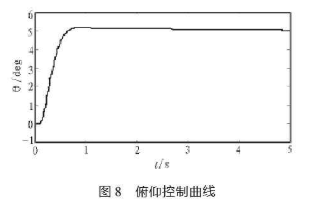
3.2 重心偏移條件下的控制結(jié)果
為了檢驗PID控制效果,文中對四旋翼的重心進行了偏移,控制結(jié)果表明控制量的快速性變差,但是控制依然平滑有效。
4、 控制邏輯
為了方便人能更加簡單的控制四旋翼,文中加入了控制邏輯。操作者面北朝南,飛機機頭可以在你前方的任意一個方向,操作者只要按自己的方位進行前后左右控制。
公式推導:Vxcmd和Vycmd是操作者控制輸入。

5、 結(jié)論
PID控制器能有效的控制四旋翼無人機的姿態(tài)角和速度,而且當四旋翼的重心發(fā)生偏移時,雖然控制的快速性有所下降,但控制效果依然滿足要求。
責任編輯:gt
-
控制器
+關注
關注
112文章
16444瀏覽量
179076 -
PID
+關注
關注
35文章
1473瀏覽量
85720 -
無人機
+關注
關注
230文章
10515瀏覽量
181830
發(fā)布評論請先 登錄
相關推薦
【Simple】嵌入式四旋翼無人機的應用
【OK210申請】四旋翼無人機導航與控制
四環(huán)串級控制無人機
一種四旋翼無人機控制系統(tǒng)的設計與實現(xiàn)研究
筆記:四旋翼無人機從0到1的實現(xiàn),目錄鏈接






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論