 利用LSTM網絡結構將車輛過去的位置包含到預測算法中
利用LSTM網絡結構將車輛過去的位置包含到預測算法中
摘要:在自動駕駛領域,預測變道意圖一直是一個非常活躍的研究領域。然而,大多數文獻都集中在單個車輛上,并且在進行預測時沒有考慮鄰居信息和車輛歷史軌跡的累積影響。我們建議應用周圍感知LSTM算法來預測車輛執行車道變換的意圖,該車道變換利用車輛過去軌跡和其鄰居的當前狀態。我們根據真實世界的變道數據對模型進行了訓練,并且能夠在仿真中顯示出這兩個組件不僅可以提高精度,還可以提前預測變道時間,這對提高自動駕駛車輛的整體性能具有重要作用。
Ⅰ.介紹
車道變換被認為是造成交通事故的主要因素之一[1]。為了使自動駕駛車輛能夠在高速公路上行駛,重要的是要預測其他車輛變換車道的意圖以防止潛在的碰撞。嘗試模擬駕駛員的車道變換行為已經有很多工作,可以分為幾種類型:基于規則的算法[2],[3],[4],基于機器學習的算法[5],[ 6],[7]和知識表示算法[8],[9],[10]。
基于規則的算法定義了一組規則來模擬車道變換。最具代表性的是“間隙接受模型”[2],它假設駕駛員的車道變換機動是基于目標車道的超前和滯后間隙。該方法假設如果間隙達到最小可接受值,則駕駛員傾向于進行車道變換。雖然在簡單的場景中直觀且穩健,但是這樣的方法需要大量的參數微調,這可能是繁瑣且耗時的。
基于機器學習的算法為這個問題創建了一個數學模型:給定與車輛相關的特征作為輸入,車輛的變道意圖作為輸出,這些方法試圖推斷映射函數,以獲得最佳預測結果。該模型采用了大量分類器,如邏輯回歸[5]和SVM分類器[6]。
知識表示算法開發了一個網絡模型來模擬人類的推理過程。基于知識的算法在駕駛場景中的應用包括強化學習[11],課程學習[12],以及通過貝葉斯網絡學習[8],[9]。但是,模型可能需要很長時間才能在學習過程中概括未知環境中的基本規則。
人力驅動車輛發起車道變換操縱的意圖不僅基于車輛自身的狀態,例如航向角和加速度,而且還基于其與相鄰車輛的關系,例如其與前方車輛的距離。最近,一些參考文獻探討了鄰近交通對自身車輛的影響。薩迪等人提出了一種算法,使自身車輛能夠在其規劃過程中模擬其他車輛的意圖,有目的地改變其他車輛的行為[ 13 ]。此外,它還要求了解其他汽車的意圖,以一種獎勵的形式,而不模仿通常在人類身上發現的合作行為。作者建議使用LSTM [15]來模擬問題的順序性質以及社交池層來模擬行人之間的相互作用。因此,他們能夠在擁擠的人群中模擬行人的軌跡,每個行人都合作地調整他們未來的軌跡。然而,由于數據中的協作交互次數較少,該方法不能直接應用于車道變換問題。
在本文中,我們還提出了利用LSTM網絡結構將車輛過去的位置包含到預測算法中,使系統能夠提取過去的相關信息。為了模擬其他汽車對決策過程的影響,同時保持問題的易處理性,我們在網絡的輸入特征中加入了關于鄰近車輛的信息。
為了全面了解自然駕駛行為,學習過程需要大量的駕駛和車道變換軌跡,這就是我們選擇NGSIM數據集[16]來訓練和驗證算法的原因。我們還采用了基于Julia的NGSIM [ 17 ]平臺來提取網絡的輸入特征,并可視化交通場景。
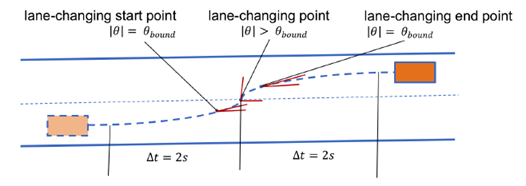
圖1.變道軌跡的起點、變道點和終點。
第二節描述了從NGSIM數據集提取和預處理數據的過程。在第三節中,我們介紹了輸入特性,并詳細解釋了具體的網絡結構。然后,我們將我們的結果與第四節中的其他方法進行說明和比較。第五節總結了我們的工作成果,并提出了未來可能的工作。
Ⅱ.數據提取和處理
開源聯邦高速公路管理局的下一代模擬( NGSIM )數據集[ 16 ]被挑選出來,用于提取車輛軌跡并建立車道變化預測模型,該數據集已被許多先前的研究[5]、[6]號采納。在0:1秒的時間間隔內,數據集記錄了美國101號高速公路[18]和80號州際公路(I-80)高速公路[19]上每輛車的位置,速度,加速度和車頭時距信息。兩個位置都包含45分鐘的車輛軌跡數據。101號高速公路長640米,有5個主要車道和6個輔助車道,而I-80長號公路約500米,有6個主要車道。
我們從NGSIM中提取了6個車輛軌跡數據序列,每個序列10分鐘。我們從每個15分鐘的序列中刪除了前5分鐘,以確保每幀中有足夠數量的車輛。對于每個序列,前2分鐘被定義為測試集,剩余的8分鐘被定義為訓練集。由于數據以每秒10幀的速度記錄,我們總共可以獲得1200個測試時間步長和4800個訓練時間步長。
車輛被標記為“打算向左改變車道”,“打算沿著車道行駛”,或者“打算在每個時間步驟改變車道”。我們標記車輛狀態的方式如下。
如圖1所示,我們首先收集所有車道交換點,即車輛重力點越過劃分車道的虛線的點,車輛。如果車輛在時間步長t處在變道點,我們在[t-δt,t+δt](δt=2s)檢查了它的軌跡,并在該時間段內計算其航向值θ。當θ到達邊界值θbound:|θ|=θbound時,我們標記了這個變道軌跡的起點和終點。
圖2 ( b )描述了我們標記軌跡片段的方式。對于每輛車,n個連續的時間步長被打包成一個軌跡段。如果軌跡片段的第n個時間步長是變道時間步長,則該片段是變道片段,否則它被標記為車道跟隨片段。在本文中,我們將n設置為6,9和12,以確定歷史軌跡長度對最終結果的影響。
圖2.( A )如果預測車輛連續3個時間步長進行車道變換,則確定車道變換預測點。變道預測時間被定義為變道點和變道預測點之間的時間間隔。( b ) n個連續時間步長被打包成一個軌跡段。如果軌跡片段的第n個時間步長是車道跟隨時間步長,則該片段是車道跟隨片段,否則它被標記為車道改變片段。
然后,我們可以獲得大約60,000個車道更換件,加400,000輛汽車用于訓練。這顯然涉及一個數據不平衡的問題,在這種情況下,用于訓練的車道跟隨件比車道變換件多得多,這將導致訓練過程中的過度擬合。為了解決這個問題,我們從變道左池、變道后池和變道右池中隨機選擇了相同數量的片段N,將它們混合在一起作為訓練數據集。為了最大限度地利用數據,N被設置為變道右側池中的件數( 30,000件)。
然后,給定測試集中的前( n1 )個時間步長歷史軌跡和鄰居信息,在每個時間步長預測每輛車的變道意圖。在過濾結果之后還計算了車道變換預測時間。具體地,如果預測車輛進行3個連續時間步長的車道變換,則確定車道變換預測點,并且車道變換預測時間被定義為車道變換點和車道之間的時間間隔-改變預測點,如圖2(a)所示。
III.方法
在本論文中,我們試圖預測汽車是否會改變車道以及它將合并到哪條車道。我們使用一個LSTM來使代理能夠對車輛歷史軌跡信息進行推理。然而,由于人類的決策行為也將取決于周圍的車輛,我們也將車輛鄰居信息作為網絡的輸入。
圖3.鄰居信息收集。我們首先根據自身車輛的方位和中心位置將相鄰空間劃分為四個部分,并根據它們與自身車輛的相對位置定義相應的相鄰車輛。然后,我們收集這些相鄰車輛和自身車輛之間的縱向距離作為相鄰特征。如果相應位置沒有鄰居,我們將距離定義為500米,以推斷無限距離。
在下文中,我們將描述提供給預測算法的輸入特征,然后簡要描述這里使用的網絡架構。
A.輸入功能
我們為預測算法使用兩種類型的輸入特征:(a)車輛自身的信息和(b)車輛的鄰居信息。車輛自身的信息包括:
1)車輛加速度
2)車輛相對于道路的轉向角
3)相對于車道的全球橫向車輛位置
4)相對于車道的全局縱向車輛位置
車輛的鄰居信息(參見圖3,“自我車輛”在這里指的是我們正在估算其車道變換意圖的車輛)通過以下特征提供:
1)左車道的存在(如果存在則為1,否則為0)
2)右車道的存在(如果存在則為1,否則為0)
3)自我車輛和左前方車輛之間的縱向距離
4)自我車輛和前車之間的縱向距離
5)自我車輛和右前方車輛之間的縱向距離
6)自我車輛和左后車輛之間的縱向距離
7)自我車輛和后車之間的縱向距離
8)自我車輛和右后車輛之間的縱向距離
B.網絡結構
圖4.用于車道變換意圖預測的LSTM網絡結構。
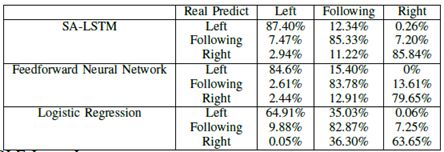
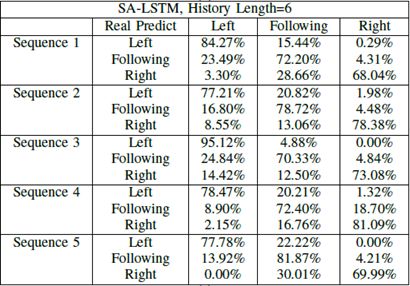
表I.改變車道預測的準確性比較
如圖4所示,我們采用LSTM網絡結構,來處理這種改變車道的意圖預測問題。為車輛自身特征及其鄰居特征選擇的嵌入維度為64,LSTM網絡的隱藏維度為128。我們選擇學習率為0:000125,使用soft-max交叉熵損失作為訓練損失:loss =-Σi=1yi′log(yi)。其中y是第i個車道改變意圖的真實標簽(yi′=1,意圖存在,yi′=0,意圖不存在。i∈{1,2,3}。y1′是改變車道的左意圖,y2′是跟隨車道的意圖,y3′是換車道的正確意圖)。yi是經過soft-max層后第i個車道變換意圖的模型的預測輸出概率。
IV.結果
A.與其他網絡結構的比較
我們獲得了我們的結果,并將其與前饋神經網絡、邏輯回歸和無相鄰特征輸入的LSTM進行了比較,以顯示添加歷史軌跡和環境因素的優勢。
表I和圖5顯示了通過我們的算法,前饋神經網絡和邏輯回歸計算的分類準確率。我們稱之為環境感知( SA ) - LSTM的方法,基于歷史軌跡信息和鄰居信息的優勢,在預測精度方面在所有分類類型(左轉換道、右轉換道和右轉換道)上都優于其他兩種方法。
B.不同軌跡長度的比較
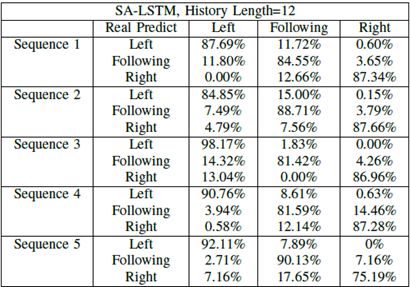
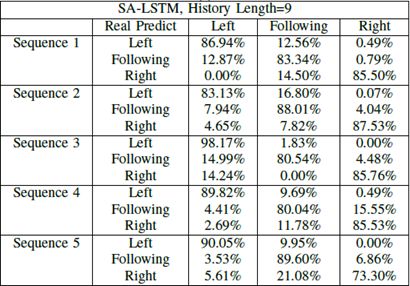
然后,我們獲得并比較了不同軌跡長度的預測準確率。具體來說,我們將LSTM結構的歷史軌跡長度設置為6,9和12,將它們相互比較。結果顯示在表II中,并在圖6中可視化。我們比較了五種不同軌跡序列的結果,以幫助我們對曲線變化趨勢有一個大致的了解。在所有預測場景中,隨著歷史長度的增加,預測精度也會增加(左變道、右變道)。
圖5所示.不同方法的預測精度比較。SA-LSTM在所有分類類型中都優于其他兩種類型,包括右車道變換,車道跟隨和左側車道變換。
從常識來看,我們所擁有的歷史軌跡長度越長,我們從先前軌跡獲得的信息就越多,并且在最終結果中將獲得更高的準確度。但是,在長度和計算時間之間需要權衡。隨著長度的增加,準確度的提高也會減慢。從圖中我們可以看出,與長度= 9相比,長度= 12僅獲得略高的準確率。更重要的是,歷史軌跡長度不能太長。否則,一些與當前變道意圖無關的因素將被引入輸入。基于上述分析,我們設置長度= 12是合理的,其中精度增加率在該NGSIM場景中減慢以獲得準確的預測,同時節省計算能力。這種分析也可以在現實世界的應用中采用,在設置適當的歷史長度參數時,應該始終考慮準確性和計算能力之間的這種權衡。
(a)
(b)
(c)
表Ⅱ.不同軌跡長度的變道預測精度比較
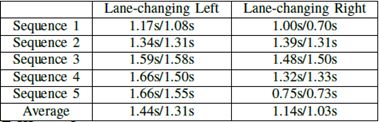
表III.有鄰居和無鄰居場景的變道預測時間比較
C.有無鄰居場景的比較
表III描述了由有和無鄰居輸入特征LSTM模型生成的換道預測時間,該時間被定義為模型預測將有換道的時間和車輛實際到達換道點的時間間隔。時間間隔越長,預測就越有用。從圖7可以看出,在大多數情況下,添加鄰居特征會延長變道預測時間。
(a)
(b)
(c)
圖6.我們比較了不同歷史軌跡長度的預測精度,LSTM網絡結構中的歷史時間步長。對于每個測試序列,預測準確度隨著歷史軌跡長度的增加而增加。
(a)
(b)
圖7.有和無鄰居場景的預測時間比較。左側變道預測和右側變道預測都顯示,在添加相鄰要素后,預測時間增加(如果沒有保持)。
V.結論
本文提出了一種LSTM網絡結構,引入了相鄰車輛的特征,以對每輛單獨車輛進行變道意圖預測。我們將我們的方法與不同的網絡結構(如前饋神經網絡和邏輯回歸)以及沒有鄰居特征的LSTM結構進行了比較,以顯示添加時間和空間信息的優勢。我們還比較了不同歷史軌跡長度之間的結構,并將其對最終預測結果的影響保存下來。未來的工作將主要集中在將算法擴展到實際場景中,并觀察是否可以在真正的自動駕駛汽車上采用經過訓練的網絡。LSTM網絡的出色表現還表明,嘗試其他經常性網絡結構可能會進一步改善交通情景中的預測結果。
-
分類器
+關注
關注
0文章
152瀏覽量
13200 -
機器學習
+關注
關注
66文章
8424瀏覽量
132766 -
自動駕駛
+關注
關注
784文章
13861瀏覽量
166590
原文標題:IEEE IV2018|預測自動駕駛車輛變道意圖
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于YOLOX目標檢測算法的改進
基于網絡表示學習與隨機游走的鏈路預測算法

網絡結構自動設計算法——BlockQNN

如何使用小型Zynq SoC硬件加速改進實時車輛檢測算法的實現
使用小型Zynq SoC芯片實現實時車輛檢測算法的資料函數





 工商網監
工商網監
評論