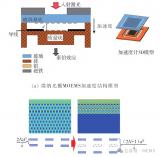
") 高性能MEMS加速度計(jì)低成本解決方案
高性能MEMS加速度計(jì)低成本解決方案
導(dǎo)航和AHRS系統(tǒng)、機(jī)器健康狀況檢測(cè)的振動(dòng)監(jiān)控、基礎(chǔ)設(shè)施的結(jié)構(gòu)健康狀況監(jiān)控和平臺(tái)穩(wěn)定、井下定向鉆探的傾斜監(jiān)控、施工行業(yè)平路機(jī)和勘測(cè)設(shè)備的調(diào)平、吊車穩(wěn)定系統(tǒng)吊桿傾角測(cè)量的高精度傾角計(jì)……
它們,都需要高性能 MEMS 加速度計(jì)來(lái)提供低成本解決方案!
一般,加速度計(jì)會(huì)經(jīng)受不同幅度的振動(dòng),但上述這些應(yīng)用的另一個(gè)不同方面是振動(dòng)的頻率成分。振動(dòng)與傳感器和系統(tǒng)誤差源相結(jié)合可能導(dǎo)致振動(dòng)校正,這是高性能加速度計(jì)的一個(gè)重要指標(biāo)。
本文將告訴你們——
? MEMS 加速度計(jì)中的振動(dòng)校正是如何發(fā)生的?
? 測(cè)量振動(dòng)校正需要知道的參數(shù)以及使用的技術(shù)。
作為案例研究,文中會(huì)討論低噪聲、低功耗加速度計(jì) ADXL355 的振動(dòng)校正。ps.低振動(dòng)校正誤差以及所有其他特性,使這款器件成為上述精密應(yīng)用的理想之選。
振動(dòng)校正的來(lái)源
振動(dòng)校正誤差 (VRE) 是加速度計(jì)對(duì)交流振動(dòng)(被整流為直流)的響應(yīng),表現(xiàn)為加速度計(jì)失調(diào)的異常偏移。在傾角計(jì)等應(yīng)用中,這是一個(gè)重大誤差源,因?yàn)榧铀俣扔?jì)的直流輸出是目標(biāo)信號(hào),失調(diào)的任何改變都可能被錯(cuò)誤地解讀為傾角變化,導(dǎo)致誤差一路向下傳遞,從而引起安全系統(tǒng)誤觸發(fā)、平臺(tái)穩(wěn)定或鉆桅對(duì)準(zhǔn)機(jī)制過(guò)度補(bǔ)償?shù)取?/p>
VRE 高度依賴于加速度計(jì)所經(jīng)受的振動(dòng)特性曲線,不同應(yīng)用施加于加速度計(jì)的振動(dòng)模式會(huì)不同,因而 VRE 可能不同。振動(dòng)校正有多種發(fā)生機(jī)制,本文討論其中的兩種。
非對(duì)稱軌
重力產(chǎn)生一個(gè)靜態(tài) 1 g (9.8 m/s2) 加速度場(chǎng),當(dāng)加速度計(jì)敏感軸豎直對(duì)齊時(shí),其測(cè)量范圍會(huì)有一個(gè)偏移。2 g 滿量程范圍的傳感器與重力加速度對(duì)齊時(shí),將只能測(cè)量 1 g 峰值振動(dòng),否則響應(yīng)會(huì)被削波。超過(guò) 1 g 的對(duì)稱激勵(lì)信號(hào)的平均值將不為零,原因是在經(jīng)受額外 1 g 加速度的方向上,電平會(huì)被削波。
圖 1 中,一個(gè)激勵(lì)振動(dòng)信號(hào)施加于 2 g 滿量程傳感器上。當(dāng)振動(dòng)為 0.3 g rms(300到600樣本之間)時(shí),失調(diào)沒(méi)有可觀測(cè)的偏移。然而,當(dāng)振動(dòng)為 1 g rms(600到1000樣本之間)時(shí),VRE約為 –100 mg。
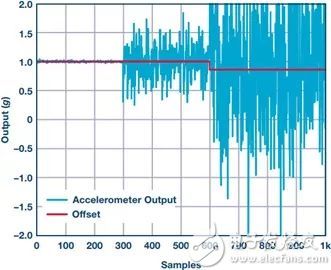 圖1. ±2 g滿量程范圍的加速度計(jì)因?yàn)榉菍?duì)稱削波而產(chǎn)生的振動(dòng)校正圖解
圖1. ±2 g滿量程范圍的加速度計(jì)因?yàn)榉菍?duì)稱削波而產(chǎn)生的振動(dòng)校正圖解
VRE 可建模為一個(gè)截?cái)喾植嫉钠骄疲芗铀俣扔?jì)滿量程范圍的限制。當(dāng)傳感器在 1 g 場(chǎng)中經(jīng)受隨機(jī)振動(dòng)時(shí),輸入激勵(lì)信號(hào)可建模為一個(gè)平均值 μ= 1 g 且標(biāo)準(zhǔn)差 σ= X 的正態(tài)分布,其中X表示輸入振動(dòng)幅度均方根值。傳感器輸出建模為雙截?cái)嗾龖B(tài)分布,輸出值下界和上界分別為–R和+R,其中R為傳感器的最大范圍。此雙截?cái)嗾龖B(tài)分布的平均值計(jì)算如下:
其中,
為概率密度函數(shù),

為其累積分布函數(shù)。
α 和 β 被定義為


這樣 VRE 即為:
比例因子非線性誤差
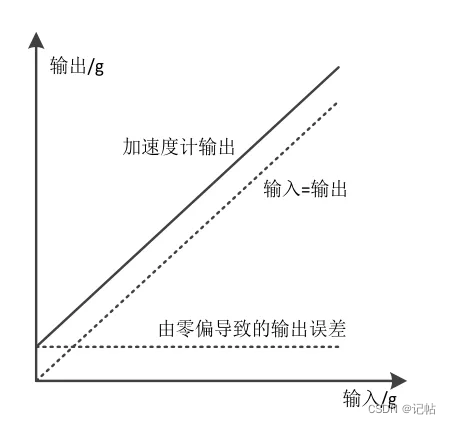
非線性誤差是指工作范圍內(nèi)加速度計(jì)輸出與最佳擬合直線的偏差。此偏差常常用滿量程輸出范圍的百分比表示。加速度計(jì)的非線性誤差可能引起 VRE。
描述加速度計(jì)非線性的常見(jiàn)模型是n次多項(xiàng)式。輸出ao (LSB)可表示為輸入ai (g)的函數(shù):

其中:
K0:失調(diào) (LSB)
K1:比例因子 (LSB/g)
Kn:非線性的n次項(xiàng)系數(shù),n = 2,3, … (LSB/gn)
考慮一個(gè)簡(jiǎn)單的正弦輸入加速度:

此輸入的時(shí)間平均值為零。加速度計(jì)的輸出可表示為:

時(shí)間平均輸出等于上式右側(cè)所有分量的時(shí)間平均值之和。奇數(shù)次項(xiàng)的平均值為零。帶入偶數(shù)次項(xiàng)的平均值
輸出的時(shí)間平均值即為:

其中Grms為輸入加速度的均方根值。上式說(shuō)明,在一個(gè)正弦振動(dòng)的情況下,二次非線性轉(zhuǎn)換為直流失調(diào)的偏移 (K2Grms2)。
 代表振動(dòng)校正系數(shù) (VRC),單位為 μg/g2-rms。
代表振動(dòng)校正系數(shù) (VRC),單位為 μg/g2-rms。
振動(dòng)校正的幅度和頻率相關(guān)性
振動(dòng)幅度很小時(shí),VRE 以傳感器非線性為主,可用 VRC 來(lái)表示: VRE = VRC × vib2rms。然而,當(dāng)振動(dòng)幅度大于滿量程范圍時(shí),VRE 往往以上一部分所述的非對(duì)稱削波為主。另外,正如之前提到的,加速度計(jì)輸出的任何非零失調(diào)也會(huì)引起非對(duì)稱削波。大多數(shù)針對(duì)工業(yè)應(yīng)用而設(shè)計(jì)的MEMS 加速度計(jì)都會(huì)內(nèi)置故障安全電路,在有很大振動(dòng)時(shí),它會(huì)關(guān)閉傳感器偏置電路,防止檢測(cè)元件受損。振動(dòng)幅度很大時(shí),此特性可能會(huì)在失調(diào)中進(jìn)一步引起異常偏移,使 VR E惡化。
由于各種諧振和器件中的濾波器,VRE 常常具有很強(qiáng)的頻率相關(guān)性。由于諧振器的兩極響應(yīng),在傳感器的諧振頻率下,MEMS 傳感器諧振會(huì)放大振動(dòng),放大比率等于諧振品質(zhì)因數(shù),而在頻率較高時(shí)則會(huì)抑制振動(dòng)。諧振品質(zhì)因數(shù)較高的傳感器,振動(dòng)幅度越大,其VRE也越大。由于高頻帶內(nèi)振動(dòng)的積分效應(yīng),較大的測(cè)量帶寬也會(huì)引起較高的VRE。信號(hào)處理電路中實(shí)現(xiàn)的模擬和數(shù)字濾波器可抑制輸出端的帶外振動(dòng)峰值和諧波,但對(duì) VRE 沒(méi)有明顯作用,原因是振動(dòng)輸入被偶數(shù)次非線性整流為直流信號(hào)。
測(cè)量振動(dòng)校正
一旦將加速度計(jì)部署于現(xiàn)場(chǎng),便無(wú)法實(shí)時(shí)補(bǔ)償 VRE。在有些應(yīng)用中,振動(dòng)引起失調(diào)中出現(xiàn)較小直流偏移是可以容忍的,對(duì)此可以測(cè)量 VRE 以估計(jì)加速度計(jì)輸出中的誤差,從而確定 VRE 是否在允許限度內(nèi)。在任何振動(dòng)測(cè)量中,振動(dòng)臺(tái)和試驗(yàn)夾具必須平齊,并且必須使用精密振動(dòng)臺(tái)以抑制振動(dòng)臺(tái)跨軸振動(dòng)、偏移和結(jié)構(gòu)諧振引起的誤差。另外,試驗(yàn)夾具必須具有適當(dāng)?shù)膭偠龋_保夾具諧振頻率離加速度計(jì)帶寬和振動(dòng)曲線頻段很遠(yuǎn)。最優(yōu)夾具設(shè)計(jì)的最低諧振頻率應(yīng)當(dāng)比最高振動(dòng)頻率高出大約 50%。
正弦振動(dòng)特性曲線
正弦振動(dòng)方法是最常用且現(xiàn)有文獻(xiàn)討論最多的方法,已被納入 IEEE標(biāo)準(zhǔn) 1293-1998。一般程序是將一個(gè)正弦振動(dòng)輸入施加于加速度計(jì),然后測(cè)量失調(diào)偏移與均方根振動(dòng)幅度(vibrms)的關(guān)系。VRC 可以通過(guò)對(duì)此數(shù)據(jù)應(yīng)用最小二乘法來(lái)估算:

由于可以很好地控制幅度,并且可以確保加速度計(jì)不會(huì)削波,因此通過(guò)這種方法能夠精確測(cè)量 VRC。這種測(cè)試還能用來(lái)識(shí)別并量化器件諧振對(duì) VRE 的影響。然而,它一次只能測(cè)試一個(gè)頻率,而要充分衡量傳感器性能,必須分別測(cè)試加速度計(jì)帶寬范圍內(nèi)的多個(gè)頻率。
隨機(jī)振動(dòng)特性曲線
VRE 也可以利用隨機(jī)振動(dòng)輸入來(lái)測(cè)量。通常,實(shí)際的振動(dòng)不像正弦振動(dòng)特性曲線那樣呈周期性或可預(yù)測(cè),因此通過(guò)這種方法可以衡量加速度計(jì)在大部分應(yīng)用中的性能。通過(guò)量化寬頻率范圍內(nèi)寬帶激勵(lì)的失調(diào)偏移,這種方法更適合于同時(shí)納入所有擾頻并激勵(lì)所有器件諧振。然而,它不保證峰峰值振動(dòng)幅度,故而獲得的VRE為頻率范圍上的平均值。
圖 2 比較了配置為 ±2 g 范圍的 ADXL355 Z 軸傳感器的截?cái)嗥骄的P团c實(shí)測(cè)VRE。測(cè)量中,Z 軸與重力(1 g場(chǎng))對(duì)齊,利用 Unholtz-Dickie 振動(dòng)臺(tái)施加一個(gè)隨機(jī)振動(dòng)特性曲線(50 Hz至2 kHz頻段)。利用一個(gè)參考加速度計(jì)(PCB Piezotronics 352C23型)測(cè)量振動(dòng)幅度;當(dāng)振動(dòng)幅度提高到滿量程范圍以上時(shí),測(cè)量失調(diào)偏移。截?cái)嗥骄的P停〝M合到2.5 g截?cái)啵┡c測(cè)量結(jié)果擬合得很好。由于機(jī)械傳感器開(kāi)銷和輸出帶寬限制(測(cè)量數(shù)據(jù)中的加速度計(jì)帶寬為1kHz,但模型不考慮帶寬),截?cái)嘞鄬?duì)于設(shè)置的滿量程范圍預(yù)計(jì)會(huì)有偏差。當(dāng)振動(dòng)水平達(dá)到8 g時(shí),±2 g范圍的超范圍保護(hù)電路就會(huì)激活。高斯分布振動(dòng)的波峰因數(shù)約為3,因此超過(guò)2.5 g rms后,實(shí)測(cè)性能開(kāi)始明顯偏離模型。
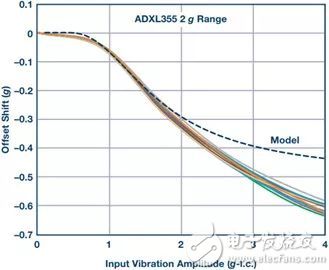 圖2. 截?cái)嗥骄禂M合與 ADXL355 實(shí)測(cè)振動(dòng)校正的比較
圖2. 截?cái)嗥骄禂M合與 ADXL355 實(shí)測(cè)振動(dòng)校正的比較
影響VRE的其他因素
MEMS 傳感器諧振會(huì)影響加速度計(jì)的振動(dòng)校正。高質(zhì)量因數(shù)會(huì)導(dǎo)致頻率接近傳感器諧振頻率的振動(dòng)信號(hào)被放大,引起較大 VRE。這可以通過(guò)比較 ADXL355(±8 g范圍、1 kHz帶寬)的 Z 軸傳感器與X軸和Y軸傳感器的VRE性能得知;圖 3 顯示X軸和Y軸傳感器的 VRE在 3 g rms 左右達(dá)到峰值,因?yàn)槠?Q 高于 Z 軸傳感器。
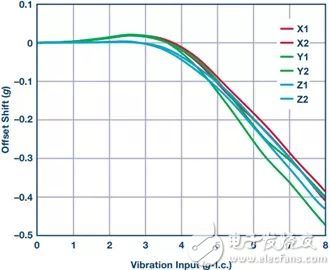 圖3. 在 ADXL355 的兩個(gè) DUT 中,高 Q(X軸、Y軸)和低 Q(Z軸)傳感器的 VRE 比較
圖3. 在 ADXL355 的兩個(gè) DUT 中,高 Q(X軸、Y軸)和低 Q(Z軸)傳感器的 VRE 比較
使用不必要的較大帶寬時(shí),也會(huì)導(dǎo)致加速度計(jì)對(duì)較高頻率成分求均值,從而對(duì) VRE 產(chǎn)生不利影響。圖4反映了這一點(diǎn),其比較了 ADXL355 DUT(±2 g范圍)的 Y 軸傳感器在兩種不同帶寬設(shè)置下的 VRE。125 Hz 帶寬設(shè)置的 VRE 顯著低于1 kHz帶寬設(shè)置的VRE。
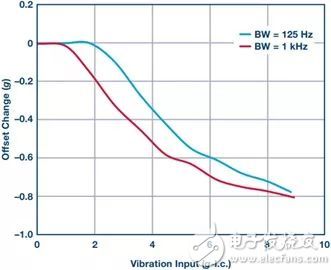 圖4. 1 g 場(chǎng)中 ADXL355 的 Y 軸傳感器(±2 g范圍)在兩種不同帶寬設(shè)置(125 Hz和1 kHz)下的VRE
圖4. 1 g 場(chǎng)中 ADXL355 的 Y 軸傳感器(±2 g范圍)在兩種不同帶寬設(shè)置(125 Hz和1 kHz)下的VRE
結(jié)語(yǔ)
為加速度計(jì)選擇合適的帶寬以抑制高頻振動(dòng),可以避免很多振動(dòng)相關(guān)問(wèn)題。通過(guò)放大諧振時(shí)的振動(dòng)耦合,包裝因素(如封裝和安裝諧振)也會(huì)影響 VRE。確保封裝有適當(dāng)?shù)膭偠龋尫庋b和安裝諧振頻率位于加速度計(jì)帶寬之外,是實(shí)現(xiàn)良好振動(dòng)校正性能的關(guān)鍵。
總之,振動(dòng)校正誤差是 MEMS 加速度計(jì)的一個(gè)重要指標(biāo),設(shè)計(jì)利用 MEMS 加速度計(jì)在高振動(dòng)環(huán)境中進(jìn)行直流測(cè)量時(shí),應(yīng)當(dāng)考慮這種效應(yīng)。
-
mems
+關(guān)注
關(guān)注
129文章
3958瀏覽量
190973 -
加速度計(jì)
+關(guān)注
關(guān)注
6文章
704瀏覽量
45968
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
ADXL345超低功耗3軸加速度計(jì)中文手冊(cè)
MEMS加速度計(jì)的工作原理是什么
PCB Piezotronics推出357A67型三軸電荷輸出加速度計(jì)
具有TLV2772的3V加速度計(jì)

EPSON工業(yè)級(jí)加速度計(jì)選型

e2studio開(kāi)發(fā)三軸加速度計(jì)LIS2DW12(1)----輪詢獲取加速度數(shù)據(jù)

ADXL355三軸加速度計(jì)手冊(cè)
三軸加速度計(jì)LIS2DUX12開(kāi)發(fā)(2)----靜態(tài)校準(zhǔn)
微納光柵MOEMS加速度計(jì)的工作原理及仿真設(shè)計(jì)
三軸加速度計(jì)LIS2DW12開(kāi)發(fā)(4)----測(cè)量?jī)A斜度
備受青睞的MEMS加速度計(jì),更小尺寸、更低功耗、更智能
采用可調(diào)電熱微梁的近零剛度MEMS加速度計(jì)

愛(ài)普生三軸加速度計(jì)傳感器HGPM01
愛(ài)普生的M-A552加速度計(jì)是結(jié)構(gòu)健康監(jiān)測(cè)的理想選擇

MEMS加速度計(jì)與MEMS陀螺儀的區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論