") 怎樣系統(tǒng)的掌握伺服的控制模式?
怎樣系統(tǒng)的掌握伺服的控制模式?
伺服的控制術(shù)語有很多:閉環(huán)控制、半閉環(huán)控制、開環(huán)控制,速度環(huán)、電流環(huán)、位置環(huán),很多朋友相信沒有弄清楚,今天就為大家詳細(xì)解答一下,伺服的控制模式是怎樣的?該怎樣系統(tǒng)的掌握這一塊?
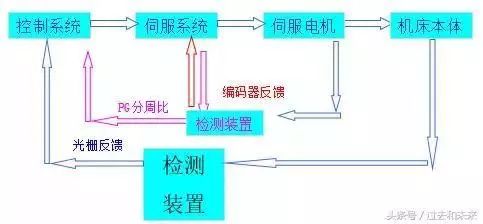
控制系統(tǒng)的控制類型
開環(huán)控制:沒有檢測裝置,或者不反饋機(jī)床的位移量到控制器。就位置控制而言,指令信號形式多為pulse
半閉環(huán)控制:檢測裝置安裝伺服電機(jī)上,間接反饋機(jī)床的位移量到控制器,不考慮機(jī)械誤差。
全閉環(huán)控制:檢測裝置安裝機(jī)床本體上,直接反饋機(jī)床的位移量到控制器。后二者,就位置控制而言指令信號形式多為模擬量電壓。
控 制 模 式 種 類
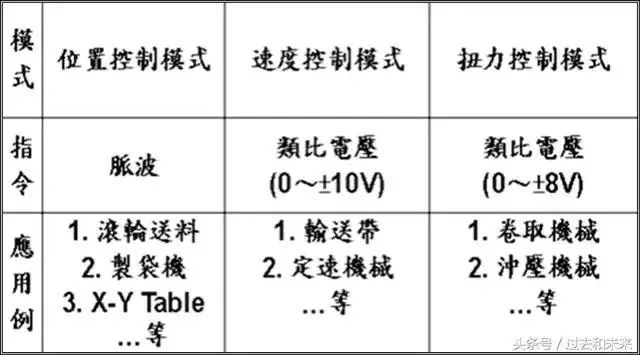
伺服放大器三種控制方式
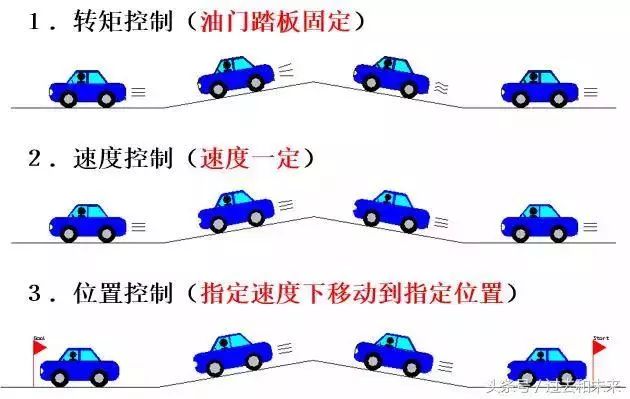
1轉(zhuǎn)矩控制:通過外部模擬量的輸入或直接的地址的賦值來設(shè)定電機(jī)軸對外的
輸出轉(zhuǎn)矩的大小,主要應(yīng)用于需要嚴(yán)格控制轉(zhuǎn)矩的場合。——電流環(huán)控制
2速度控制:通過模擬量的輸入或脈沖的頻率對轉(zhuǎn)動(dòng)速度的控制。——速度環(huán)控制
3位置控制:伺服中最常用的控制,位置控制模式一般是通過外部輸入的脈
沖的頻率來確定轉(zhuǎn)動(dòng)速度的大小,通過脈沖的個(gè)數(shù)來確定轉(zhuǎn)動(dòng)的角度,所以一般
應(yīng)用于定位裝置 。
控制理論概念
位 置 控 制 模 式
位置控制的區(qū)分:
1.半閉回路控制Ⅰ「馬達(dá)軸端檢出」
2.半閉回路控制Ⅱ「減速機(jī)端檢出」
3.全閉回路控制「機(jī)械位置檢出」
使用AC伺服馬達(dá)用于位置控制,一般是指由與伺服馬達(dá)軸心一體化的位置檢出器 (編碼器、角度檢測器等) 取得回授訊號,當(dāng)與位置指令量一致時(shí),使馬達(dá)軸停止之控制,并執(zhí)行伺服鎖定之機(jī)能(SERVO LOCK)。
適 用 于 位 置 控 制
AC 伺服馬達(dá)用于位置控制,以用途分別可區(qū)分為2大項(xiàng)
位置環(huán)的作用
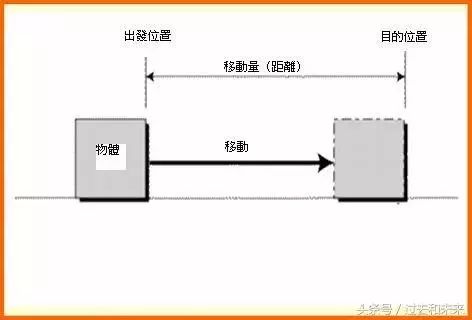
★定位指令通常以脈沖列形式輸入,脈沖總數(shù)為定位量,定位速度是單位時(shí)間(秒)的脈沖量。(PPS:Pulse/Second)
★輸入的脈沖量與反饋的脈沖數(shù)量相一致時(shí),這才實(shí)現(xiàn)定位完了。
★在位置控制部中,因?yàn)橛休斎朊}沖的加算、反饋脈沖的減算,所以有一個(gè)計(jì)數(shù)器。(也稱偏差計(jì)數(shù)器)
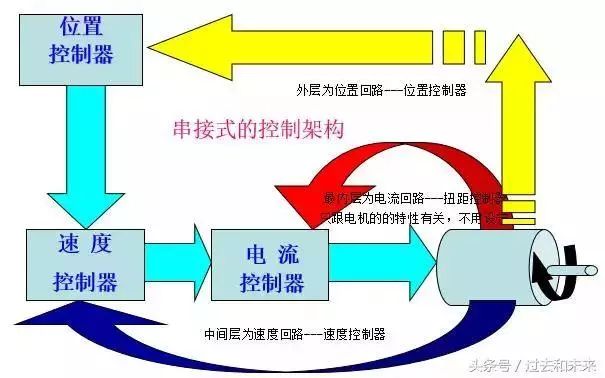
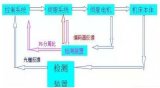
位置控制時(shí):工控機(jī)及上位控制器發(fā)出位置指令信號,脈沖+方向,送入脈沖列,經(jīng)伺服電子齒輪分頻后,在偏差可逆計(jì)數(shù)器中與反饋脈沖信號比較后形成偏差信號,反饋脈沖是由光電編碼器檢測到電機(jī)實(shí)際所產(chǎn)生的脈沖數(shù)。經(jīng)四倍頻后的,位置偏差信號經(jīng)位置環(huán)的復(fù)合前饋控制器調(diào)節(jié)后,形成速度指令信號,速度指令信號與速度反饋信號比較后的偏差信號經(jīng)速度環(huán)比例積分控制器調(diào)節(jié)后產(chǎn)生電流指令信號,在電流環(huán)中經(jīng)矢量變后,由SPWM輸出轉(zhuǎn)矩電流,控制交流伺服的運(yùn)行,位置控制精度由光電編碼器每轉(zhuǎn)產(chǎn)生的脈沖數(shù)控制,有絕對與增量兩種,增量的易于掌握,平均壽命長,分辨率高,但斷電后無保持。
速 度 控 制 模 式
AC伺服馬達(dá)與其它一般的可變速裝置:(變頻器、直流馬達(dá)等)一樣,運(yùn)轉(zhuǎn)速度
可變換。其特長:
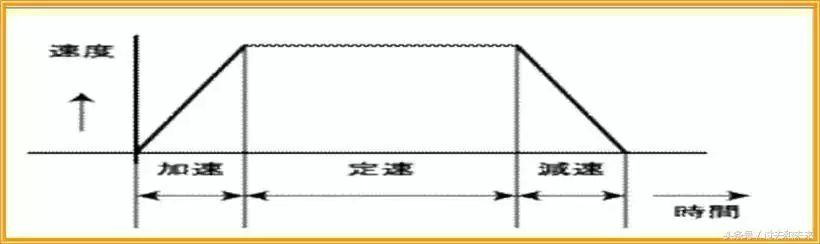
a.緩起動(dòng)、停止機(jī)能:加減速時(shí)產(chǎn)生的沖擊,加速及減速的變動(dòng)率。
b.廣大的速度控制范圍:從低速至高速之間的控制范圍(1:1000 ~ 5000)速度控制范圍內(nèi)、定轉(zhuǎn)矩
特性。
c.速度變動(dòng)率小:即使負(fù)載變動(dòng),速度依然不會(huì)有太大的改變產(chǎn)生。
轉(zhuǎn) 矩 控 制 模 式
AC伺服馬達(dá)以電流做高精度的輸出轉(zhuǎn)矩控制。一般的用途為位置控制或速度控制時(shí)依速度偏差的結(jié)果所做電流控制。或由外部直接控制電流值、亦可控制馬達(dá)的輸出轉(zhuǎn)矩如絞布機(jī)械等張力控制即可運(yùn)用。
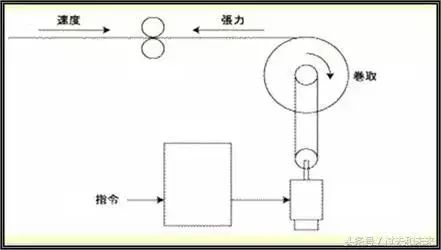
A.張力控制時(shí),卷取的滾輪半徑越大時(shí)、負(fù)載轉(zhuǎn)矩相對增加。伺服馬達(dá)的輸出轉(zhuǎn)矩相對增加。
B.卷取途中材料切斷時(shí),負(fù)載瞬間變輕,但馬達(dá)高速回轉(zhuǎn),此時(shí)伺服馬達(dá)的輸出轉(zhuǎn)矩減少。
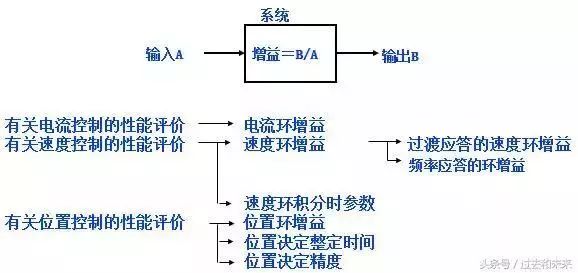
伺服的性能評價(jià)
評價(jià)伺服的應(yīng)答性(指令輸入后輸出的情況(電機(jī)如何轉(zhuǎn)動(dòng)),使用回路增益這個(gè)用語就是GAIN,獲得和利益的意思。是輸入和輸出之比所解釋的技術(shù)術(shù)語,現(xiàn)在直接使用增益來表示。
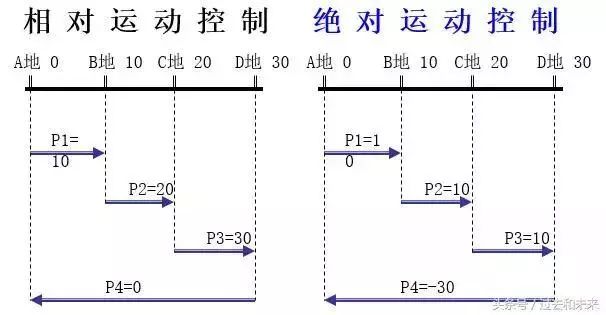
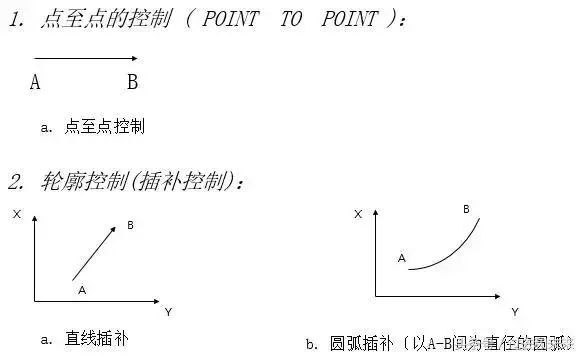
1.相對運(yùn)動(dòng):必需對位置值加以計(jì)算,點(diǎn)動(dòng)運(yùn)行、往返運(yùn)動(dòng)一定位置量的控制系統(tǒng)。
2.絕對運(yùn)動(dòng):直接下達(dá)位置值,可用于XY軸、table等,一般的機(jī)械均可使用。于指令程序中較為簡便
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6657瀏覽量
110792 -
伺服
+關(guān)注
關(guān)注
16文章
653瀏覽量
41047
原文標(biāo)題:想掌握工業(yè)機(jī)器人伺服,伺服的控制模式你知道嗎?
文章出處:【微信號:gongkongBBS,微信公眾號:工控網(wǎng)智造工程師】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
伺服電機(jī)系統(tǒng)控制中的轉(zhuǎn)矩模式和速度模式介紹
伺服的控制模式是怎樣的?該怎樣系統(tǒng)的掌握這一塊?
伺服電機(jī)的三種控制場景模式
一文詳解伺服電機(jī)與伺服控制器
怎樣通過PLC來控制伺服系統(tǒng)
PLC如何控制伺服電機(jī)?如何設(shè)計(jì)伺服系統(tǒng)?

伺服放大器的三種控制方式

淺談伺服電機(jī)的控制模式
伺服電機(jī)常用的三種控制模式有哪些
伺服驅(qū)動(dòng)器控制模式有哪幾種類型
松下伺服速度控制模式怎么設(shè)置
伺服驅(qū)動(dòng)器控制模式有哪幾種?
伺服控制系統(tǒng)的分類方式和常見伺服控制系統(tǒng)介紹
伺服控制系統(tǒng)的分類方式和常見伺服控制系統(tǒng)介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論