 工業機器人的運動指令知識學習
工業機器人的運動指令知識學習
工業機器人的運動指令
通常工業機器人商務運動指令記錄了位置數據、運動類型和運動速度。如果在工業機器人示教期間,不設定運動類型和運動速度,則自動使用上一次的設定值。位置數據記錄的是工業機器人當前的位置信息,記錄運動指令的同時,記錄位置信息。運動類型指定了在執行時示教點之間的運動軌跡。工業機器人一般支持3種運動類型:關節運動(MOVJ)、直線運動(MOVL)、圓弧運動(MOVC)。運動速度指機器人以何種速度執行在示教點之間的運動。
一、工業機器人關節運動類型:
當機工業器人不需要以指定路徑運動到當前示教點時,采用關節運動類型。關節運動類型對應的運動指令為MOVJ。一般說來,為安全起見,程序起始點使用關節運動類型。關節運動類型的特點是速度最快、路徑不可知,因此,一般此運動類型運用在空間點上,并且在自動運行程序之前,必須低速檢查一遍,觀察工業機器人實際運動軌跡是否與周圍設備有干涉。
二、工業機器人直線運動類型:
當工業機器人需要通過直線路徑運動到當前示教點時,采用直線運動類型。直線運動類型對應的運動指令為MOVL。直線運動的起始點是前一運動指令的示教點,結束點是當前指令的示教點。對于直線運動,在運動過程中,工業機器人運動控制點走直線,夾具姿態自動改變如下圖:
三、工業機器人圓弧運動類型:
當工業機器人需要以圓弧路徑運動到當前示教點時,采用圓弧運動類型。圓弧運動類型對應的運動指令為MOVC。
1、單個圓弧
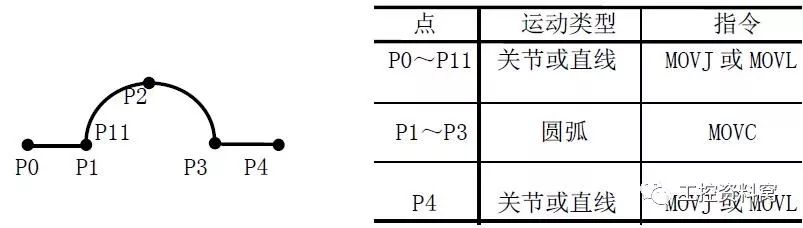
三點確定唯一圓弧,因此,圓弧運動時,需要示教三個圓弧運動點,即P1~P3,如下圖所示。如果示教點P0為關節或直線運動,在開始圓弧運動前,機器人以直線從P0點運動到P11點,P11點與起弧點P1是同一點。
2、連續多個圓弧
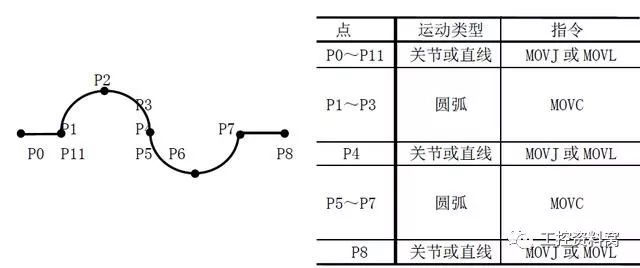
當需要連續多個圓弧運動時,兩段圓弧運動必須由一個關節或直線運動點隔開,且第一段圓弧的終點和第二段圓弧的起點重合。
程序指令編寫如下:
NOP
MOVJVJ=10------P0
MOVLVL=100-----P11
MOVCVC=100---P1與P11為同一點
MOVCVC=100---P2
MOVCVC=100---P3
MOVJVJ=10------P4
MOVCVC=100----P5與P3和P4為同一點
MOVCVC=100----P6
MOVCVC=100----P7
MOVLVL=100-----P8
END
3、圓弧運動速度
(1)P2點運行速度用于P1到P2的弧。
(2)P3點運行速度用于P2到P3的弧。
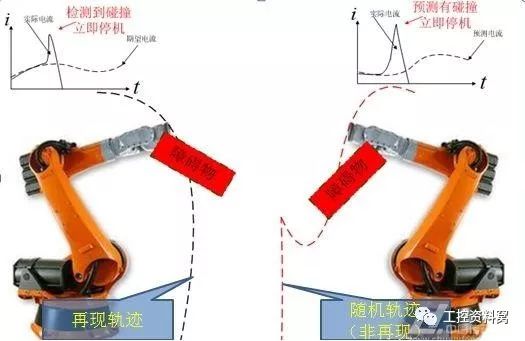
四、工業機器人運動參考示意圖:
-
指令
+關注
關注
1文章
611瀏覽量
35795 -
工業機器人
+關注
關注
91文章
3374瀏覽量
92802
原文標題:工業機器人操作基礎-工業機器人運動指令
文章出處:【微信號:gongkongworld,微信公眾號:工控資料窩】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論