") 運(yùn)動(dòng)控制器以模擬量信號(hào)控制伺服電機(jī)的一般調(diào)試步驟
運(yùn)動(dòng)控制器以模擬量信號(hào)控制伺服電機(jī)的一般調(diào)試步驟
運(yùn)動(dòng)控制器控制伺服電機(jī)通常采用兩種指令方式:
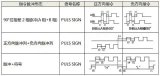
1、數(shù)字脈沖這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號(hào);伺服驅(qū)動(dòng)器工作在位置控制模式,位置閉環(huán)由伺服驅(qū)動(dòng)器完成。日系伺服和國(guó)產(chǎn)伺服產(chǎn)品大都采用這種模式。其優(yōu)點(diǎn)是系統(tǒng)調(diào)試簡(jiǎn)單,不易產(chǎn)生干擾,但缺點(diǎn)是伺服系統(tǒng)響應(yīng)稍慢。
2、模擬信號(hào)這種方式下,運(yùn)動(dòng)控制系統(tǒng)給伺服驅(qū)動(dòng)器發(fā)送+/-10V的模擬電壓指令,同時(shí)接收來自電機(jī)編碼器或直線光柵等位置檢測(cè)元件的位置反饋信號(hào);伺服驅(qū)動(dòng)器工作在速度控制模式,位置閉環(huán)由運(yùn)動(dòng)控制器完成。歐美的伺服產(chǎn)品大多采用這種工作模式。其優(yōu)點(diǎn)是伺服響應(yīng)快,但缺點(diǎn)是對(duì)現(xiàn)場(chǎng)干擾較敏感,調(diào)試稍復(fù)雜。
以下介紹運(yùn)動(dòng)控制器以模擬量信號(hào)控制伺服電機(jī)的一般調(diào)試步驟:
-
運(yùn)動(dòng)控制器
+關(guān)注
關(guān)注
2文章
408瀏覽量
24776 -
伺服電機(jī)
+關(guān)注
關(guān)注
85文章
2057瀏覽量
58095
原文標(biāo)題:伺服電機(jī)調(diào)試的6個(gè)步驟,你知道嗎?
文章出處:【微信號(hào):GKB1508,微信公眾號(hào):工控幫】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
伺服電機(jī)如何選擇脈沖、模擬量、通訊三種控制方式?
如何調(diào)試伺服電機(jī),調(diào)試伺服電機(jī)的方法
教你怎樣選擇伺服電機(jī)控制方式
伺服電機(jī)的控制方式
請(qǐng)問伺服電機(jī)的調(diào)試步驟有哪些?
運(yùn)動(dòng)控制器以模擬量信號(hào)控制伺服電機(jī)的調(diào)試步驟
運(yùn)動(dòng)控制器控制伺服電機(jī)采用的指令和伺服電機(jī)調(diào)試的6個(gè)步驟說明
運(yùn)動(dòng)控制器以模擬量信號(hào)控制伺服電機(jī)的步驟
伺服電機(jī)如何選擇脈沖、模擬量、通訊三種控制方式?

為什么模擬量電流信號(hào)的標(biāo)準(zhǔn)信號(hào)一般都是4-20mA?
模擬量信號(hào)控制伺服電機(jī)調(diào)試的6個(gè)步驟
伺服控制器是什么_伺服控制器用途
運(yùn)動(dòng)控制器以控制伺服電機(jī)的一般調(diào)試步驟
伺服電機(jī)如何選擇脈沖、模擬量、通訊三種控制方式






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論