 未來的SLAM會是什么樣?
未來的SLAM會是什么樣?
今天為什么又講SLAM呢?主要是國內有公司宣布要趟這個坑。在美國那頭,AR云也正是領域里比較熱門的一個方向。在很多做AR云的方向的公司的想象中的AR云,也大多是以SLAM作為基礎的。大家怎么看?歡迎留言討論
眾所周知,SLAM,即同時定位與地圖構建,主要解決在未知環境中,如何進行自身方位的定位,并同時構建三維環境的地圖。它是機器人和計算機視覺領域的一個基本問題,基本上,需要定位和三維感知的應用都需要用到SLAM技術。然而,最近幾年中,SLAM技術幾乎沒有什么變化。
最近,倫敦帝國學院的 Andrew Davison 發表了一篇論文,主要闡述由于增強現實眼鏡或機器人等設備所要求的視覺感知性能與現實產品的實際條件之間存在的巨大差距,而對未來空間人工智能算法的計算結構和硬件開發方面的探索。
Andrew Davison最知名的成就是其 2003 年的 MonoSLAM 系統,而且他是第一個展示如何在單個攝像頭上構建 SLAM 系統的人,而那時候其他所有人都還認為打造 SLAM 系統需要一個立體的雙目攝像頭套件。
舉個例子來說,想象一下未來的AR系統應該具有怎樣的空間記憶能力,對于用戶所到達的地點,遇到的人和物體,用戶在空間中放置的虛擬筆記或其他注釋等等都要有所記錄。另外,為了實現廣泛應用,該設備應該具備標準眼鏡的尺寸和重量,整天無需電池充電即可運行。
顯然,這種理想中的AR系統依靠現在的設備和算法是遠遠達不到的,這篇論文也就是闡述對于現在的硬件和算法可能的優化方向。
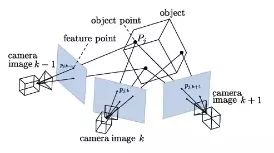
現在的SLAM技術,大多是所謂的閉環SLAM,即從攝像頭和傳感器捕捉新圖像數據后,系統與當前的世界模型進行比較,進行對當前世界模型的更新。而當前的世界模型,則來源于更早一次同樣的更新。
這種方法所有獲得的有用數據,都來源于傳感器(如深度攝像頭),最終在實時循環中用于數據關聯和跟蹤。
而論文中提到一種新的混合型SLAM系統,把SLAM 作為卷積神經網絡和深度學習的補充:SLAM 關注于幾何問題,而深度學習是感知、識別問題的大師。如果你想要一個能走到你的冰箱面前而不撞到墻壁的機器人,那就使用 SLAM。如果你想要一個能識別冰箱中的物品的機器人,那就使用卷積神經網絡。這種系統同樣適用在前面提到的閉環輸出,表現可能會更好。
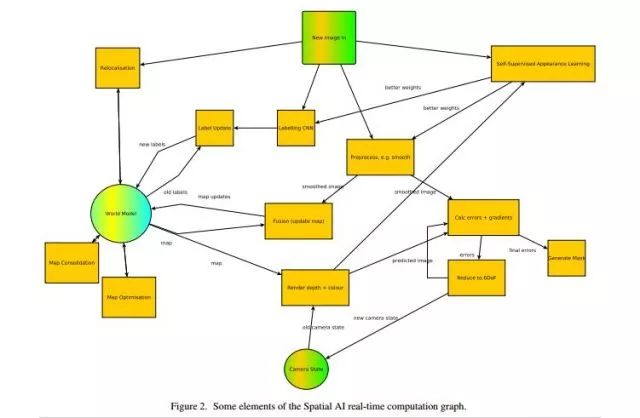
未來大多數計算可能會涉及世界模型的塑造,這就要求一個不斷地改變和改進數據存儲的系統。在此系統中,一些主要的計算元素有:
標注:對圖像進行經驗性標注(例如CNN)。
渲染:從世界獲得密集的預測,并映射到圖像空間。
跟蹤:將預測與新圖像數據對齊,包括尋找離群值和檢測獨立運動。
融合:將更新的幾何圖形和標簽重新融合
地圖。
地圖合并:將元素融合到對象中,使元素平滑,正規化。
重新定位/閉環檢測:檢測總地圖中的相似性。
映射一致性優化,即緊固閉環。
自我學習:系統從運行中進行自我學習
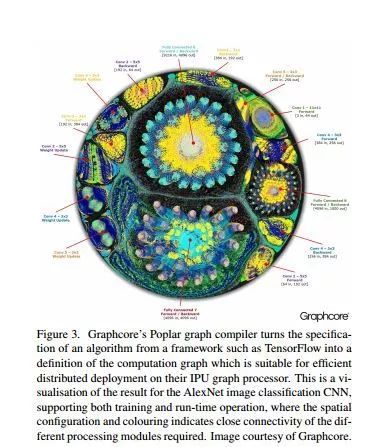
原文:這是一個可視化AlexNet圖像分類CNN的結果,支持訓練和運行時操作,其中空間配置和著色表示不同的緊密連接需要處理模型。(不明白也沒關系,這只是論文中談到世界模型時提到的例子)
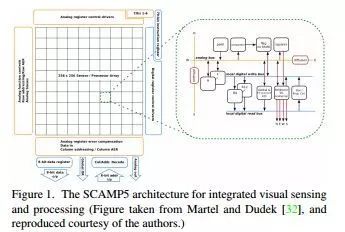
隨著技術工藝的進步,摩爾定律的瓶頸似乎開始出現,追求單核更大功率的處理器還是比較困難的,而在SLAM中, 單指令,多線程GPU提供的并行性,也非常適合實時視覺的計算要求。
因此,論文預測,系統將具備異構,多元素,專業化的架構,在這個架構中,低功率運行必須與高功率一起實現,而由于架構的靈活性和其中數量巨大的CPU和GPU,可以提高系統中運行的有用軟件的數量。但是,它也可能會優化一些專門的處理器,進而實現低功耗實時視覺。當然,專門為這種架構設計的系統算法也會出現,以期提高效率。
另外,云計算資源的容量可能將繼續擴大,未來的系統可能大部分時間都是云連接的。主地圖將存儲在云中, 設備將根據需要在其中輸出數據。這種情況下,每個設備需要做的事情都理論上會大大減少。但這就需要高幀率傳輸的支持,而后者也是比較難解決的問題。
對于傳感器而言,傳感器得到的數據龐大然而存在冗余,舉例來說,圖片中相鄰像素之間的數據有可能非常相似,相鄰兩幀圖片的信息也有可能很相似。所以有時龐大的數據處理并不必要。
因此,論文中提出一種簡化數據的方法,將所有傳感器接入一個總處理器中進行預處理,但考慮到散熱等問題,又改為在傳感器單元中嵌入簡易的處理器,從而簡化數據,得到更高的效率。
論文中還表示,從長遠來看,SLAM由于其實時性和廣泛的實用性,不同應用的輸出和性能水平不同,特別難以通過像數據集評估之類的手段確定一個SLAM的基準。因此SLAM的基準應該走向預測可能需要執行的任務的一般化標準。其中可能的指標包括:
?新探索的區域中的局部姿態準確性(視覺
里程漂移率)。
?良好映射的長期度量姿態重復性區域。
?跟蹤魯棒性百分比。
?重新定位魯棒性百分比。
?SLAM系統延遲。
?每個像素的密集距離預測精度。
?對象分割的準確性。
?對象分類準確性。
?AR像素配準精度。
?場景變化檢測精度。
?電力使用情況。
?數據移動
總之,作者認為,由于SLAM的在各個領域中的重要性,對SLAM的研究仍將保持下去,在這些方面越來越優化。
這篇論文是建立在作者對大部分現有的SLAM技術和困難了解的基礎上完成的一個總結,比較有參考價值。對原文感興趣的同學也可以戳閱讀原文下載
-
神經網絡
+關注
關注
42文章
4779瀏覽量
101052 -
人工智能
+關注
關注
1794文章
47642瀏覽量
239674 -
SLAM
+關注
關注
23文章
426瀏覽量
31895
發布評論請先 登錄
相關推薦
【自由暢想】未來的傳感器會是什么樣子的?
未來通信將會是什么?
未來的工廠會是什么樣子的呢?人工智能(AI)在未來的工廠的作用概述
IT行業的未來是什么樣?
乘坐自動駕駛汽車到底什么感覺?未來的汽車會是什么樣的?
未來的物聯網學校是什么樣的
來自未來的手機將會是什么樣子
Chiplet的未來會是什么樣子呢?
基于HTTP/3構建SSH協議會是什么樣呢?






 工商網監
工商網監
評論