

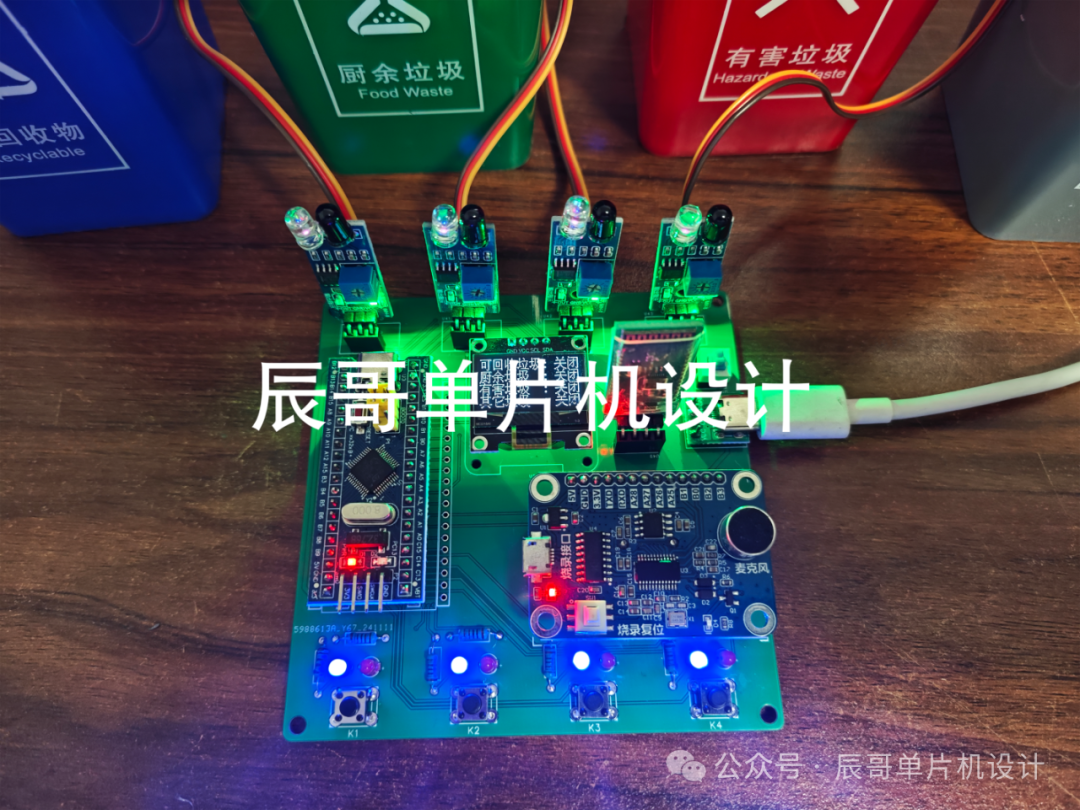
項目成品圖片:

01
—
項目簡介
1.功能詳解
功能如下:
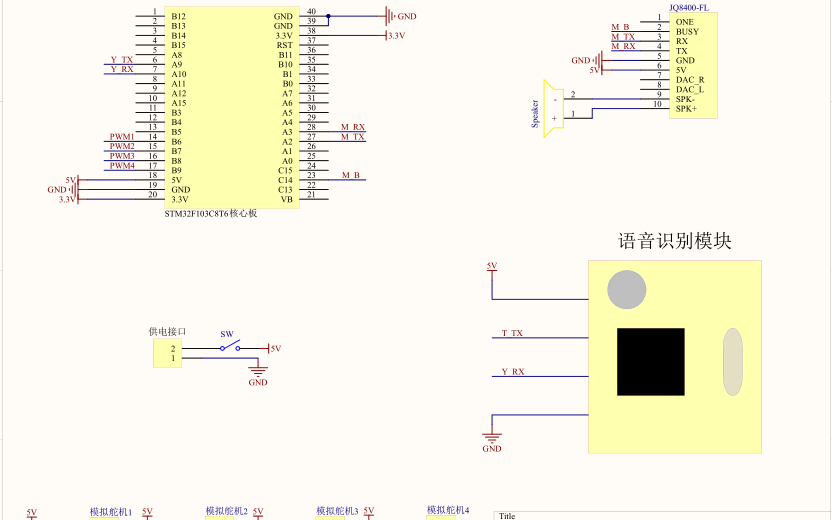
1. STM32F103C8T6單片機系統板作為主控單元
2. 舵機驅動垃圾桶蓋打開與關閉
3. 按鍵控制四個分類垃圾桶的開關
4. 語音識別控制分類垃圾桶開關
6. OLED顯示屏顯示分類垃圾桶開關狀態
2.材料清單
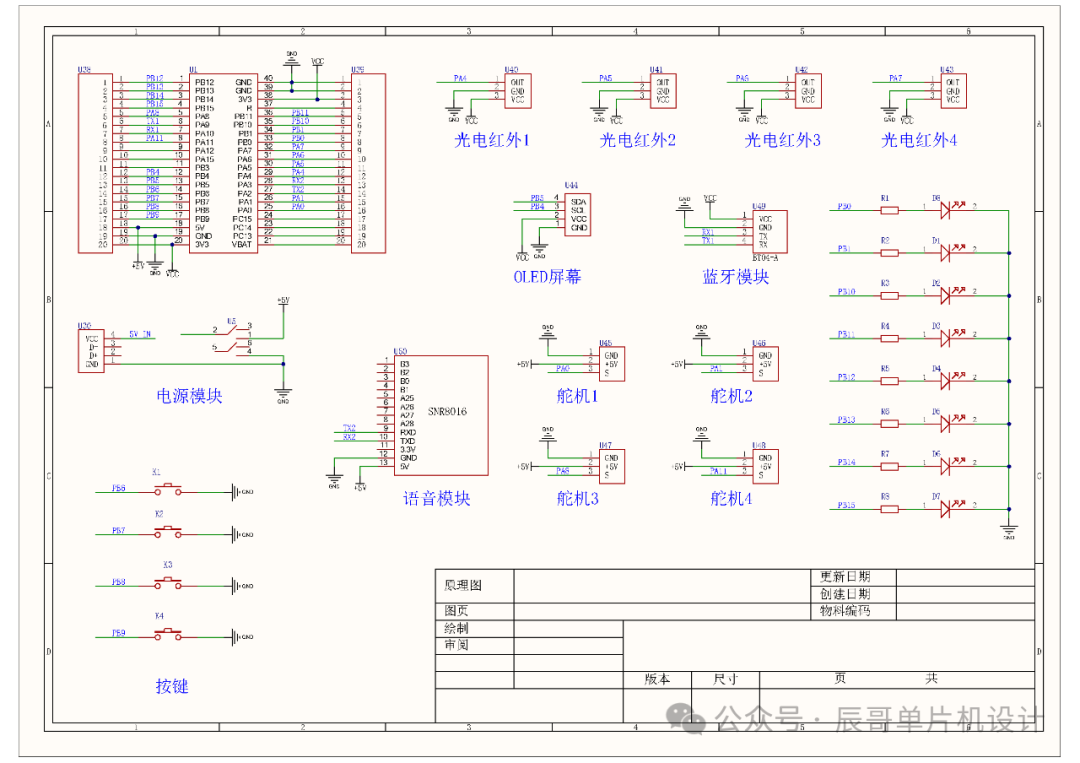
STM32F103C8T6單片機
OLED 屏幕
光電紅外傳感器
SNR8016語音識別模塊
BT04A藍牙模塊
舵機
02
—
原理圖設計
03
—
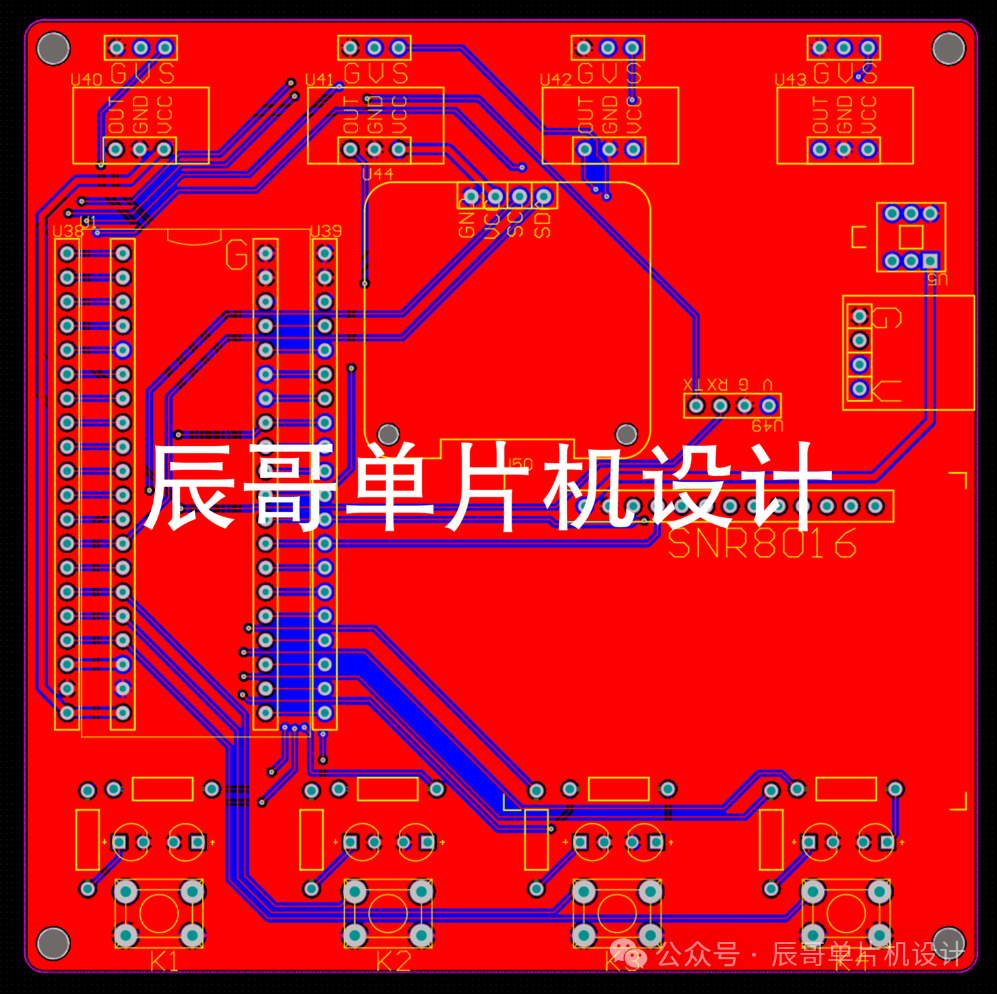
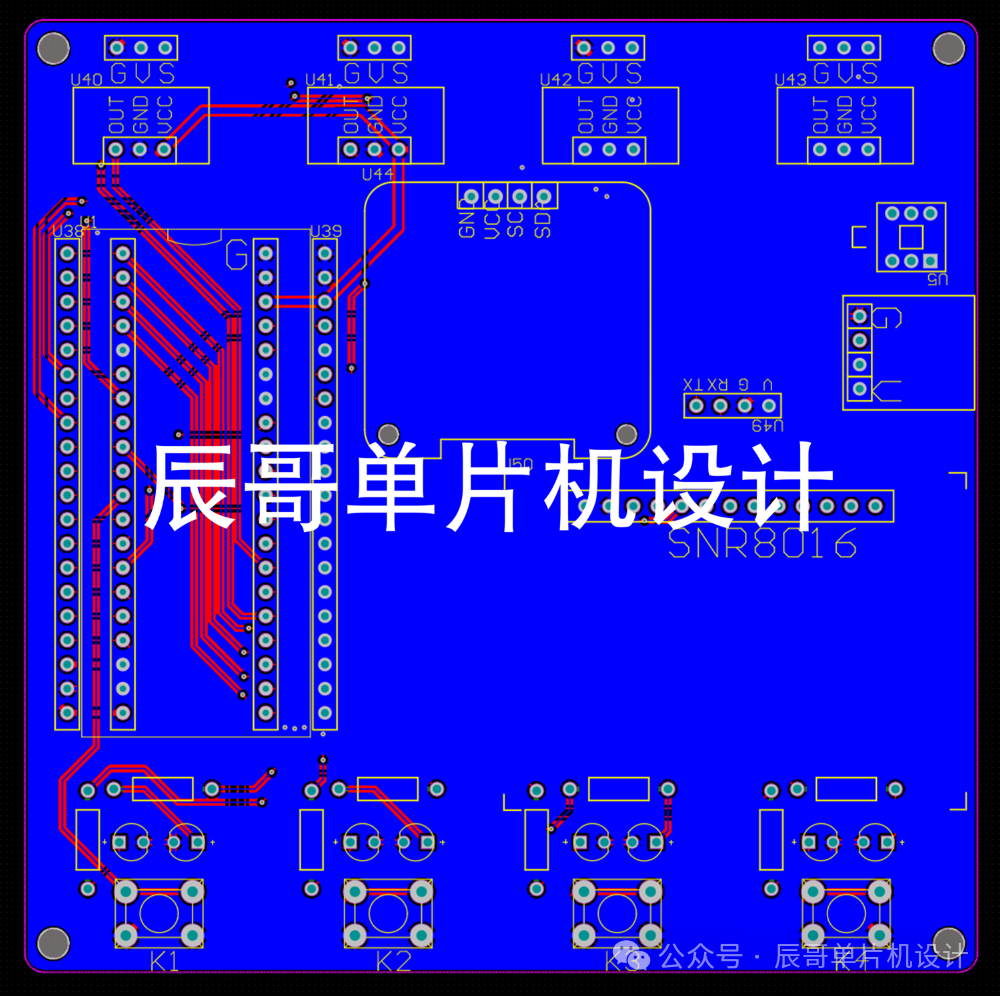
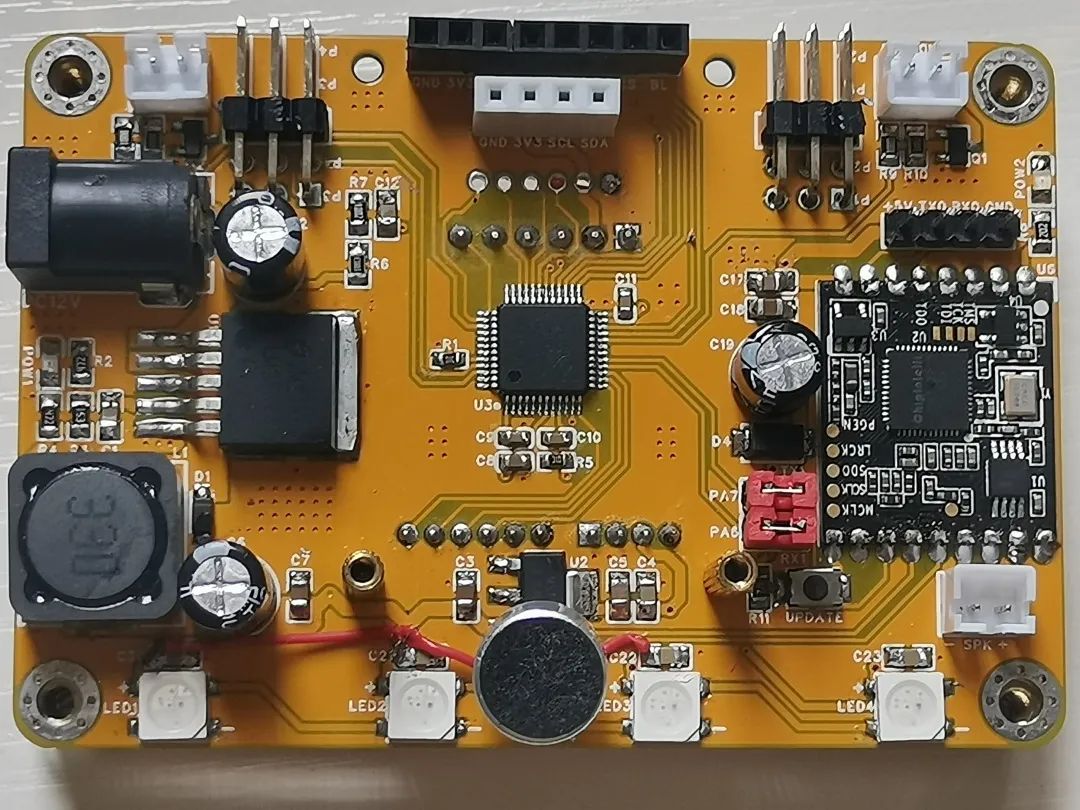
PCB硬件設計
PCB圖
04
—
程序設計
#include"sys.h"#include"stdio.h"#include"string.h"#include"delay.h"#include"gpio.h"#include"key.h"#include"usart.h"#include"motor_duoji.h"#include"oled.h"
/**********************************變量定義**********************************/uint8_tkey_num =0;//按鍵掃描標志位uint32_ttime_num =0;//10ms計時uint8_tflag_waste_1 =0;//可回收垃圾桶標志位uint8_tflag_waste_2 =0;//廚余垃圾桶標志位
uint8_tflag_waste_3 =0;//有害垃圾桶標志位uint8_tflag_waste_4 =0;//其他垃圾桶標志位externuint8_tusart2_buf[64];//串口2接收數組
/**********************************函數聲明**********************************/voidKey_function(void);//按鍵函數
voidMonitor_function(void);//監測函數voidManage_function(void);//處理函數
/***********主函數*****/intmain(){Delay_Init(); //延時初始化 Gpio_Init(); //IO初始化Key_Init(); //按鍵初始化Motor_Duoji_Init(); //舵機初始化Motor_Duoji2_Init(); //舵機初始化OLED_Init();Usart1_Init(9600);//串口1初始化Usart2_Init(9600);//串口2初始化
TIM_SetCompare1(TIM1,1830); //PWM輸出Delay_ms(100);//延時100msTIM_SetCompare4(TIM1,1830); //PWM輸出Delay_ms(100);//延時100msTIM_SetCompare1(TIM2,1830); //PWM輸出Delay_ms(100);//延時100msTIM_SetCompare2(TIM2,1830); //PWM輸出Delay_ms(100);//延時
100msOLED_Clear();OLED_ShowChinese(0,0,0,16,1);OLED_ShowChinese(16,0,1,16,1);OLED_ShowChinese(32,0,2,16,1);OLED_ShowChinese(48,0,15,16,1);OLED_ShowChinese(64,0,16,16,1);OLED_ShowChar(80,0,':',16,1);OLED_ShowChinese(96,0,11,16,1);OLED_ShowChinese(112,0,12,16,1);
OLED_ShowChinese(0,16,3,16,1);OLED_ShowChinese(16,16,4,16,1);OLED_ShowChinese(32,16,15,16,1);OLED_ShowChinese(48,16,16,16,1);OLED_ShowChar(80,16,':',16,1);OLED_ShowChinese(96,16,11,16,1);OLED_ShowChinese(112,16,12,16,1);
OLED_ShowChinese(0,32,5,16,1);OLED_ShowChinese(16,32,6,16,1);OLED_ShowChinese(32,32,15,16,1);OLED_ShowChinese(48,32,16,16,1);OLED_ShowChar(80,32,':',16,1);OLED_ShowChinese(96,32,11,16,1);OLED_ShowChinese(112,32,12,16,1);
OLED_ShowChinese(0,48,7,16,1);OLED_ShowChinese(16,48,8,16,1);OLED_ShowChinese(32,48,15,16,1);OLED_ShowChinese(48,48,16,16,1);OLED_ShowChar(80,48,':',16,1);OLED_ShowChinese(96,48,11,16,1);OLED_ShowChinese(112,48,12,16,1);
while(1){key_num =Chiclet_Keyboard_Scan(0);//按鍵掃描
if(key_num !=0)//有按鍵按下
{switch(key_num){case1://按鍵1:控制可回收垃圾桶打開OLED_ShowChinese(96,0,9,16,1);OLED_ShowChinese(112,0,10,16,1);TIM_SetCompare1(TIM2,1920); //打開
Delay_ms(1000);//延時2sDelay_ms(1000);TIM_SetCompare1(TIM2,1830); //關閉OLED_ShowChinese(96,0,11,16,1);OLED_ShowChinese(112,0,12,16,1);break;
case2://按鍵2:控制廚余垃圾桶打開
OLED_ShowChinese(96,16,9,16,1);OLED_ShowChinese(112,16,10,16,1);TIM_SetCompare2(TIM2,1920); //打開
Delay_ms(1000);//延時2sDelay_ms(1000);TIM_SetCompare2(TIM2,1830); //關閉
OLED_ShowChinese(96,16,11,16,1);OLED_ShowChinese(112,16,12,16,1);break;
case3://按鍵3:控制有害垃圾桶打開OLED_ShowChinese(96,32,9,16,1);OLED_ShowChinese(112,32,10,16,1);TIM_SetCompare1(TIM1,1920); //打開
Delay_ms(1000);//延時2sDelay_ms(1000);TIM_SetCompare1(TIM1,1830); //關閉OLED_ShowChinese(96,32,11,16,1);OLED_ShowChinese(112,32,12,16,1);break;
case4://按鍵4:控制其他垃圾桶打開
OLED_ShowChinese(96,48,9,16,1);OLED_ShowChinese(112,48,10,16,1);TIM_SetCompare4(TIM1,1920); //打開Delay_ms(1000);//延時2sDelay_ms(1000);TIM_SetCompare4(TIM1,1830); //關閉
OLED_ShowChinese(96,48,11,16,1);OLED_ShowChinese(112,48,12,16,1);break;
default:break;}}if(USART2_WaitRecive() ==0)//如果收到數據{if(usart2_buf[0] ==0x01)//收到語音指令是“廢紙|塑料瓶|可回收垃圾”,控制可回收垃圾桶打開
{OLED_ShowChinese(96,0,9,16,1);OLED_ShowChinese(112,0,10,16,1);TIM_SetCompare1(TIM2,1920); //打開
Delay_ms(1000);//延時2sDelay_ms(1000);TIM_SetCompare1(TIM2,1830); //關閉USART2_Clear();//清空緩存
OLED_ShowChinese(96,0,11,16,1);OLED_ShowChinese(112,0,12,16,1);}elseif(usart2_buf[0] ==0x02)//收到語音指令是“剩飯|骨頭|廚余垃圾”,控制廚余垃圾桶打開
{OLED_ShowChinese(96,16,9,16,1);OLED_ShowChinese(112,16,10,16,1);TIM_SetCompare2(TIM2,1930); //打開
Delay_ms(1000);//延時2sDelay_ms(1000);TIM_SetCompare2(TIM2,1820); //關閉USART2_Clear();//清空緩存
OLED_ShowChinese(96,16,11,16,1);OLED_ShowChinese(112,16,12,16,1);}elseif(usart2_buf[0] ==0x03)//收到語音指令是“燈泡|有害垃圾”,控制有害收垃圾桶打開
{OLED_ShowChinese(96,32,9,16,1);OLED_ShowChinese(112,32,10,16,1);TIM_SetCompare1(TIM1,1920); //打開Delay_ms(1000);//延時2sDelay_ms(1000);TIM_SetCompare1(TIM1,1830); //關閉USART2_Clear();//清空緩存OLED_ShowChinese(96,32,11,16,1);OLED_ShowChinese(112,32,12,16,1);}elseif(usart2_buf[0] ==0x04)//收到語音指令是“木頭|其他垃圾”,控制其他垃圾桶打開
{OLED_ShowChinese(96,48,9,16,1);OLED_ShowChinese(112,48,10,16,1);TIM_SetCompare4(TIM1,1920); //打開Delay_ms(1000);//延時2sDelay_ms(1000);TIM_SetCompare4(TIM1,1830); //關閉USART2_Clear();//清空緩存OLED_ShowChinese(96,48,11,16,1);OLED_ShowChinese(112,48,12,16,1);}}if(IR_1 ==0)//可回收垃圾桶裝滿,紅燈亮,并通過藍牙發送"可回收垃圾桶已滿"{Delay_ms(100);if(IR_1 ==0){LED1_G =0;LED1_R =1;if(flag_waste_1){UsartPrintf(USART1,"可回收垃圾桶已滿\r\n");flag_waste_1 =0;}}}else//未裝滿,綠燈亮{LED1_G =1;LED1_R =0;flag_waste_1 =1;}
if(IR_2 ==0)//廚余垃圾桶裝滿,紅燈亮,并通過藍牙發送"廚余垃圾桶已滿"{Delay_ms(100);if(IR_2 ==0){LED2_G =0;LED2_R =1;if(flag_waste_2){UsartPrintf(USART1,"廚余垃圾桶已滿\r\n");flag_waste_2 =0;}}}else//未裝滿,綠燈亮
{LED2_G =1;LED2_R =0;flag_waste_2 =1;}
if(IR_3 ==0)//有害垃圾桶裝滿,紅燈亮,并通過藍牙發送"有害垃圾桶已滿"{Delay_ms(100);if(IR_3 ==0){LED3_G =0;LED3_R =1;if(flag_waste_3){UsartPrintf(USART1,"有害垃圾桶已滿\r\n");flag_waste_3 =0;}}}else//未裝滿,綠燈亮
{LED3_G =1;LED3_R =0;flag_waste_3 =1;}
if(IR_4 ==0)//其他垃圾桶裝滿,紅燈亮,并通過藍牙發送"其他垃圾桶已滿"{Delay_ms(100);if(IR_4 ==0){LED4_G =0;LED4_R =1;if(flag_waste_4){UsartPrintf(USART1,"其他垃圾桶已滿\r\n");flag_waste_4 =0;}}}else//未裝滿,綠燈亮
{LED4_G =1;LED4_R =0;flag_waste_4 =1;}
}}
05
—
實驗效果

-
STM32
+關注
關注
2281文章
10971瀏覽量
360408 -
智能語音
+關注
關注
10文章
793瀏覽量
49229
發布評論請先 登錄
相關推薦
基于CW32的智能語音分類垃圾桶

人工智能分類垃圾桶原理
基于51單片機的一個語音識別分類智能垃圾桶設計
『開源項目』基于STM32的智能垃圾桶之舵機控制(HAL庫)

『開源項目』基于STM32的智能垃圾桶之語音播報





 工商網監
工商網監

評論