
 通關人形機器人控制鏈,這家國產RISC-V芯片公司做到了
通關人形機器人控制鏈,這家國產RISC-V芯片公司做到了
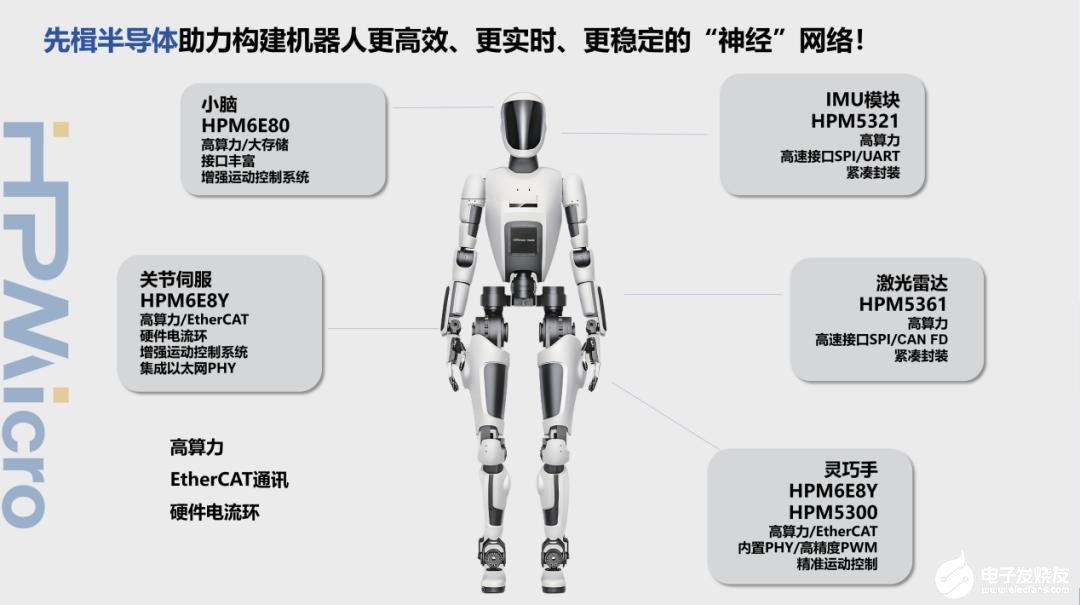
電子發燒友網報道(文/吳子鵬)近來,人形機器人產業爆火,引發廣泛關注。從系統構成來看,人形機器人需多種專用芯片協同工作,以實現復雜運動控制、感知交互和能源管理等功能。在系統控制方面,人形機器人需 CPU 或 GPU 等高算力芯片作為 “大腦”,處理多模態交互及環境感知數據;還需高算力、高集成的 MPU 或 MCU 芯片作為 “小腦”,優化機器人運動姿態與步態;同時,也需要高性能的 MCU 用于電機驅動或感知控制等環節,控制機器人動作執行與感知反饋。
先楫半導體執行副總裁兼市場銷售負責人陳丹(Danny Chen)在接受電子發燒友網《人形機器人電機控制與傳感》專題采訪時表示,在人形機器人領域,先楫半導體目前雖沒有 “大腦” 芯片,但能為機器人客戶提供“小腦” 、關節伺服、實時通訊、感知控制等方面的芯片及解決方案。

貫通人形機器人控制鏈
先楫半導體是一家專注于高性能嵌入式解決方案的半導體公司,產品涵蓋微控制器、微處理器和周邊芯片,以及配套的開發工具和生態系統。該公司芯片主要采用 RISC-V 內核,是全球領先的 RISC-V 芯片公司。如陳丹所言,先楫半導體的方案已貫通從感知、通訊到運動、控制的整個控制鏈,致力于幫助機器人客戶打造業界領先的人形機器人關節和神經。
在關節驅動方面,當前全球主流的人形機器人基本采用電力驅動方式。電機驅動芯片將主控芯片發出的信號轉換為電機所需的驅動信號,實現對電機轉速、扭矩和方向的控制。陳丹認為,關節是為人形機器人提供強勁動力的關鍵,不僅要求輸出大扭矩,還需快速響應,且多個關節間要保持良好同步性。這就要求負責關節驅動的 HPM MCU 必須具備高算力、高實時性和集成實時通訊接口。其中,高算力和高實時性確保關節電機驅動能快速實現電流環控制、FOC、補償和濾波等算法,快速輸出所需力矩并到達目標位置;實時通訊如 CANFD、EtherCAT、TSN 等,能滿足各種復雜工況下穩定、可靠、實時的通訊需求,契合關節驅動要求。
人形機器人的神經主要指機器人體內的通訊系統,用于實現各模塊間通信。常見的總線通信技術有控制器局域網絡(CAN)、以太網控制自動化技術(Ether CAT)、串行外設接口(SPI)、集成電路總線(I2C)總線等。陳丹指出,通訊系統負責傳遞“大腦”和“小腦”計算出的各個控制指令,反饋各個傳感器、關節驅動等檢測到的信息和狀態等,高速、低延時、穩定的體內通訊系統至關重要。先楫半導體的 HPM6E00 系列 MCU 是工業網絡通訊 MCU,集成了 USB、CANFD、Ether CAT、千兆以太網控制器和 TSN交換機,能滿足人形機器人的各種通信需求。例如,其中 EtherCAT 的延遲可小至 us 級,抖動達 ns 級,可作為各個關節之間、靈巧手之間的通信網絡;TSN(時間敏感網絡)作為國內外廣受關注的下一代高實時性網絡通訊技術,可以兼顧數據傳輸的高帶寬和確定性及可靠性,有望在未來人形機器人中獲得廣泛應用。。
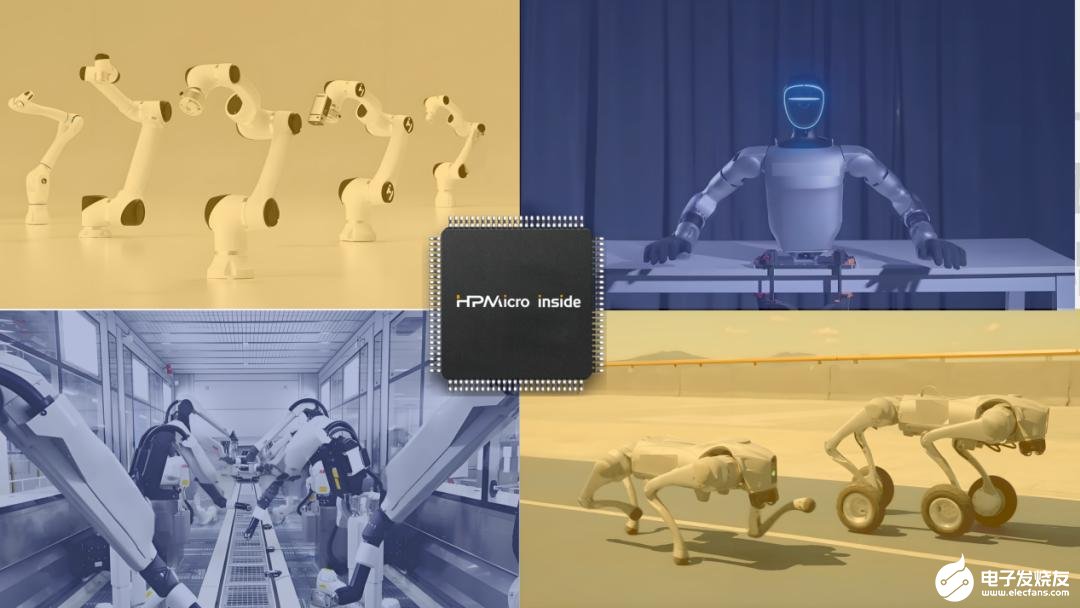
(先楫半導體MCU芯片在機器人領域的應用)
人形機器人用到的傳感器種類眾多,包括視覺、力矩、雷達、位置、慣性測量單元(IMU)等。要實現高效的感知和運動控制,需對這些傳感信息進行處理和傳輸。陳丹稱,由于人形機器人的傳感器分布于全身各處,且輸出方式各異,所以需用 MCU 將傳感器信息轉換并及時傳送到“大腦”、“小腦”和各個執行器。先楫半導體的 HPM5000 系列 MCU 具有 480MHz 主頻、16 位高精度 ADC、豐富的 CAN、UART 接口,非常適合作為分布式的傳感器處理 MCU。
為人形機器人提供高效電機驅動方案
綜上所述,先楫半導體能夠為人形機器人提供高算力、高性能運動控制、高實時通訊、高集成度及小型化、高安全和高可靠性的控制方案,憑借這 “5 高” 特性賦能人形機器人發展。之所以能做到這些,是因為先楫半導體針對機器人的關鍵特性對自身芯片和方案進行了專門優化。
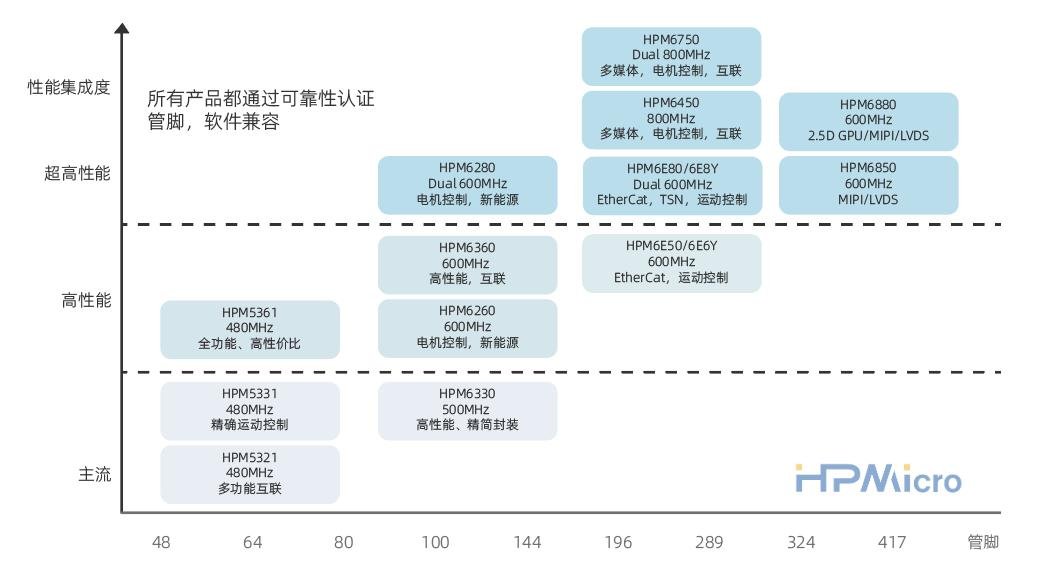
以本期專題聚焦的電機控制應用展開。先楫半導體的目標是成為伺服行業國產 MCU 第一品牌,為伺服驅動客戶提供豐富的產品規劃。例如,適合做驅顯一體的 HPM6400 和 6700 系列,適合做多軸控制的 HPM6200 系列,適合做編碼器的 HPM5300 系列,適合做總線伺服的 HPM6E00 系列,還有先楫半導體預計將于3月底發布的適合做高性能脈沖伺服的新產品 HPM6P00 系列等。相較于傳統機器人的電機控制,人形機器人的電機控制具有高響應特性、高集成度、高功率密度等特點,先楫半導體針對這些特性進行了專項優化。
(先楫半導體產品圖)
要實現人形機器人毫秒甚至微妙級的高響應特性,對 MCU 整體提出了更高要求,如更快的執行速度、更快電流采樣、更快的 SVPWM 發波等。為滿足人形機器人電機控制需求,先楫半導體在 HPM6E00 和 HPM6P00 系列中嵌入硬件電流環,將電流環執行時間從傳統的 10us 縮短至 200ns 左右,提升幅度達百倍以上。
要滿足人形機器人緊湊的布局要求,尤其是在手或腳的末端,電機驅動器必須具備高集成度。在傳統的總線型工業電機控制或關節上,主控芯片采用 MCU+FPGA+ESC+PHY 的形式,有 5 個大尺寸芯片。而先楫半導體在 2025 年 CES 上新推出的機器人關節專用芯片 HPM6E8Y,將 5 顆大尺寸芯片集成于一顆芯片,極大地節省了空間。特別值得一提的是,HPM6E8Y 是全球首款集成 ESC 和 PHY 的高性能 MCU。
為使人形機器人具備更強續航能力,對電機驅動提出了高效和高功率密度的要求。高載波是提高電機驅動功率密度的有效手段之一,可縮小感性器件的尺寸和質量,但也對控制 MCU 提出了更高算力要求。先楫半導體的 HPM6E00 和 HPM6P00 系列產品的高算力 CPU、硬件電流環、2MSPS 的 ADC 等,都能有效提升控制器的實時運算能力,有利于提高載波頻率,進而提升關節驅動的功率密度。
全方位、全產業鏈的機器人布局
中國電子學會預計,2030 年中國人形機器人市場規模有望突破 8700 億元,成為繼新能源汽車后的新萬億級終端市場。先楫半導體憑借性能領先的芯片和方案,有望在快速增長的人形機器人市場取得佳績。
當然,陳丹特別強調,先楫半導體并非因近期人形機器人產業大熱才開始布局該領域,而是憑借在機器人市場全方位、全產業鏈的布局,自然成為人形機器人方案商的優質選擇之一。
先楫半導體在機器人領域布局較早,且采用全方位、全產業鏈的布局方式。全方位是指先楫半導體自成立之初就聚焦機器人產業,從工業機臂、協同機械臂、AMR 移動機器人、服務機器人到近期火熱的四足機器人和人形機器人;全產業鏈是指先楫半導體不僅支持機器人整機廠家,也支持關節模組、編碼器、傳感器、自動化集成商等產業鏈上下游企業。
此外,陳丹在采訪中提到,作為國產高性能 RISC-V 內核 MCU 芯片供應商,先楫半導體不僅實現了芯片性能領先,還在生態系統、開發工具和資源方面提供完備支持。例如,在開發工具方面,先楫半導體提供了完善的開發工具,如不斷優化的 SDK,其中包含各種外設的底層驅動、中間件等,還有豐富的例程,涵蓋音頻、電機驅動、AI 等領域;在開發資源方面,先楫半導體不僅自身提供各種接近量產級的方案,還有眾多專業合作伙伴,能協助客戶快速開發產品,大幅縮短產品上市時間。
-
RISC-V
+關注
關注
46文章
2419瀏覽量
47539
發布評論請先 登錄
相關推薦
如何讓人形機器人更智能、更安全?這家國產MCU廠商給出答案?
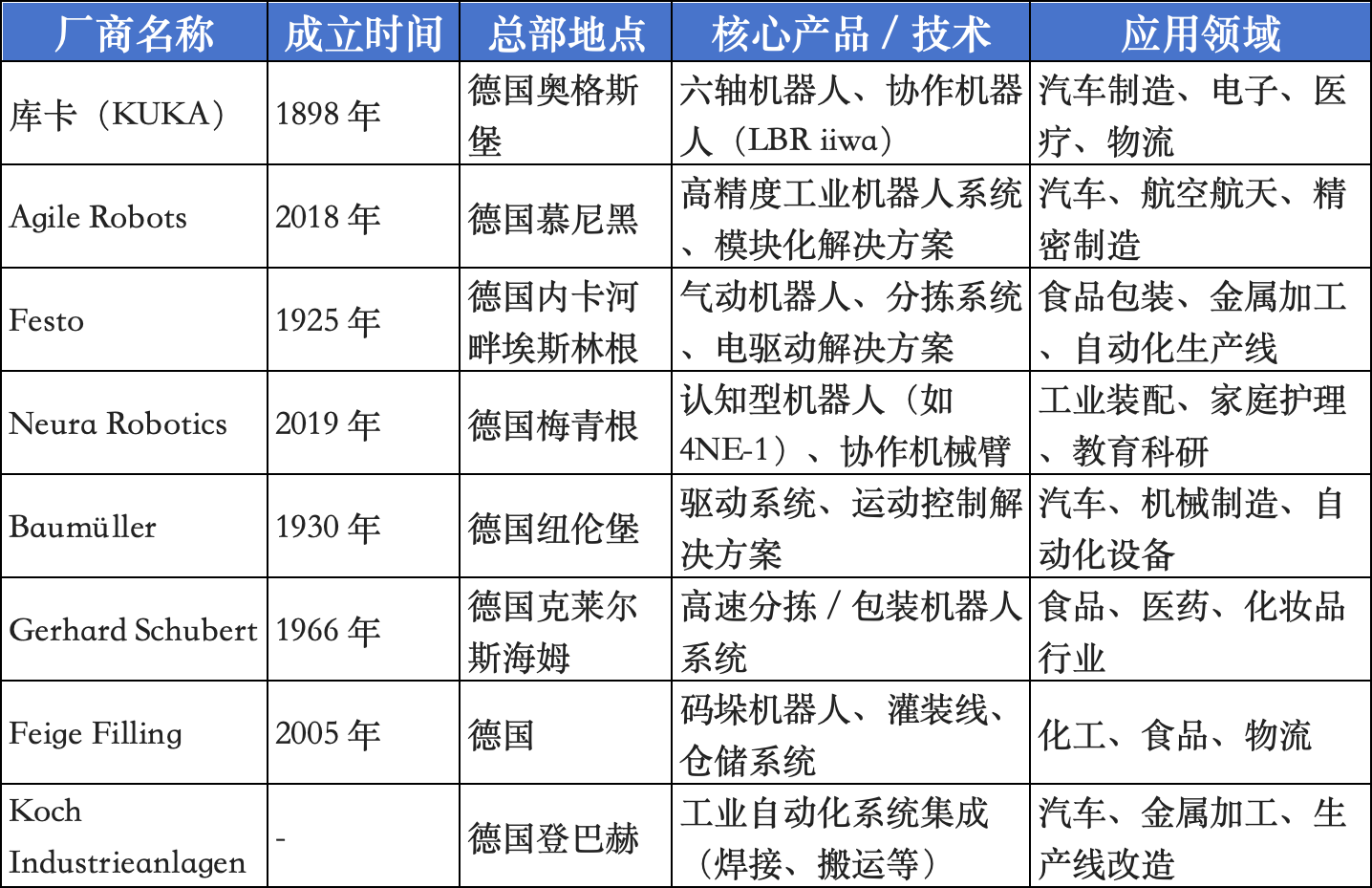
作為工業強國,德國為何僅有一家人形機器人公司??
伺服電動缸在人形機器人中的應用
關于RISC-V芯片的應用學習總結
RISC-V 工具鏈簡介
rIsc-v的缺的是什么?
國產人形機器人,占領上海灘

廣和通成功入選2024人形機器人供應鏈優質企業
為何什么risc-v芯片比arm的效率高
risc-v多核芯片在AI方面的應用
國產RISC-V MCU推薦
未來之聲 | 人形機器人說話篇:無聲!







 工商網監
工商網監

評論